 基于磁控智能材料软体机器人的设计与制造
基于磁控智能材料软体机器人的设计与制造

导读:软体机器人具有自由度高、连续变形能力强和环境适应性好等诸多优点,是近年来机器人领域研究的前沿热点。4D 打印最早由麻省理工大学提出,是指利用智能材料的响应特性结合编程化设计,制造出形态和性能随时间可变的三维物体。4D打印与软体机器人的结合,突破了机器人就是马达齿轮加上控制的传统概念,目前哈佛大学、MIT、德国马普所、NASA等国际顶级科研单位均有所布局。3月3日19时30分,仿真秀机器人工业品仿真第八期讲座《基于磁控智能材料软体机器人的设计与制造》将邀请笔者分享软体机器人前沿技术,详情见后文。
一、智能材料与4D打印
智能材料(Intelligent material)指具有感知环境(包括内环境和外环境)刺激,对之进行分析、处理、判断,并采取一定的措施进行适度响应的智能特征的材料。典型的智能材料如图1所示。智能材料是继天然材料、合成高分子材料、人工设计材料之后的第四代材料,是 21 世纪最具有发展潜力的前瞻性研究领域之一,也是当今世界军事领域的关键技术。
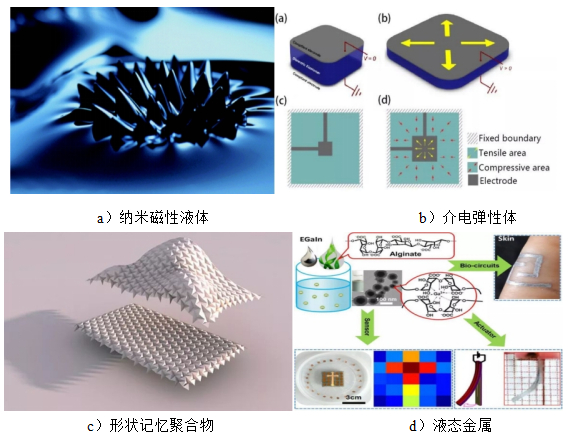
图1 典型智能材料
4D打印技术是指由3D技术打印出来的结构能够在外界激励下发生形状或者结构的改变,直接将材料与结构的变形设计内置到物料当中,简化了从设计理念到实物的造物过程,让物体能自动组装构型,实现了产品设计、制造和装配的一体化融合。将4D打印技术应用于软体机器人的设计与制造中,可以突破现有软体机器人驱动材料和支撑材料难以结合设计的技术瓶颈,使其结构功能化、功能多样化。
2013年2月26日,在美国加利福尼亚州长滩市举行的TED2013大会上,来自麻省理工学院的Skylar Tibbits将两种具有不同孔隙率和吸水性的材料组合用于 3D 打印机,制造出了一种线状物体。将该物体放入水中,物体改变了自身形状,组成了麻省理工学院的字母缩写 “MIT”,就此提出了 4D 打印的概念。
4D打印结构的形状、属性或功能在外部环境刺激(如水、光、热、电流、磁场、酸碱环境等)下会随着时间的推移而改变,如图6所示。与3D打印结构相比,4D打印结构因为智能材料的使用而具有了自组装、自适应、自我修复的特性。Wang等将遗传易处理的微生物沉积物在湿度惰性材料上形成非均匀多层结构,制成生物杂化膜,该杂化膜可以在几秒钟内根据环境湿度梯度可逆地改变形状。用其制成跑步服的皮瓣,皮瓣可以根据湿度梯度动态调节通风散热。
4D打印最关键是将智能材料的响应特性与打印工艺有机结合,受自然界中卷须、叶子、花苞等通过内部膨胀来响应环境刺激的启发;哈佛大学Sydney等基于采用纤维素与水凝胶的复合油墨打印了智能结构,在打印时,通过控制复合油墨中纤维素的排列,以对水凝胶网络编码溶胀行为。因此,当成型后的智能结构浸入水中后,部分结构受硬质纤维的约束而无法溶胀,整体结构发生局部溶胀,从而形成预设的零件模型。美国麻省理工大学Kim 等基于直写式打印技术,采用磁性材料与硅胶的复合油墨打印了可实现快速变形的磁流变弹性体。在前驱液处于液态下混入磁粉(钕铁硼),打印时在喷头周围施加定向磁场,以在材料固化前编码磁畴方向。制备完成后的磁流变弹性体可以在外界磁场激励下发生预设的变形,如图2所示。
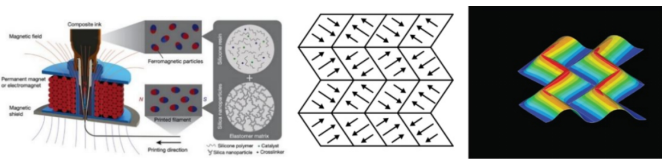
图2 麻省理工大学采用4D打印方法制作的可变性磁流变弹性体
二、软体机器人与制造技术
软体机器人是一种新型柔软机器人,能够适应各种非结构化环境,与人类的交互也更安全,软体机器人的驱动方式主要取决于所使用的智能材料;一般有介电弹性体(DE)、离子聚合物金属复合材料(IPMC)、形状记忆合金(SMA)、形状记忆聚合物(SMP)、响应水凝胶等,从响应的物理量暂时分为如下几类:电场、压力、磁场、化学反应、光、温度。科学家依此设计了各种各样的软体机器人,大多数软体机器人的设计是模仿自然界各种生物,如蚯蚓、章鱼、水母等。科学家曾预言,新型智能材料的研制及其在在软体机器人的大规模应用将导致科学发展的重大革命。
软体机器人制造技术包括形状沉积制造、硅胶浇注、3D 打印和混合加工等工艺。形状沉积制造是一种多层沉积工艺,通过重复沉积-去除的步骤,制得所需的软体机器人本体结构。此外,还可在沉积过程中嵌入传感器、驱动源和电路等功能部件,实现本体-传感-驱动一体化制造。然而,形状沉积制造一般只能采用手工操作且步骤繁琐,限制了软体机器人的制造质量和效率。硅胶浇注是通过拆分模型并设计模具,利用石蜡或凡士林涂层以防止粘连,将弹性体混合溶液(例如硅橡胶和固化剂)倒入模具固化成型,最后将各部分构件粘结成具有特定结构的软体机器人本体。然而,硅胶浇注方式粘结面易破裂且难以适用于多材料制造等缺点限制了软体机器人的服役生命周期、操作安全性及多功能性。
2016年,美国哈佛大学以超弹性硅胶材料作为本体材料,结合最新3D 打印技术,打印出了第一个纯软体仿章鱼机器人,引起了国内外学者的广泛关注,如图3所示。3D打印制造技术避免了人工误差、简化了制造步骤,实现了软体机器人低成本的个性化制造。随着智能材料打印工艺与计算机仿真编程技术的不断发展,基于智能材料响应特性的4D打印制造软体机器人成为可能。然而由于材料4D打印工艺复杂,且打印后的材料响应特性无法重新进行编程,亟待基于材料流变特性将4D打印与软体机器人技术相整合,提出结构功能一体化设计新方法。

图3 哈佛大学采用3D打印技术制作的第一个纯软体机器人
三、基于磁控智能材料软体机器人的设计与制造
为了帮助大家更好学习软体机器人的前沿技术,并拓展创新思维,3月3日,仿真秀机器人工业品仿真第八期讲座《基于磁控智能材料软体机器人的设计与制造》将邀请仿真秀专栏作者、清华大学博士后李振坤老师分享,他长期从事磁性软材料流变特性及测量的基础理论、软材料 3D 打印及 4D 打印、磁控软体机器人开发研究。
审核编辑 :李倩
-
智能材料
+关注
关注
0文章
10浏览量
7531 -
4D打印
+关注
关注
0文章
37浏览量
12352 -
软体机器人
+关注
关注
1文章
114浏览量
12086
原文标题:清华大学李振坤:基于磁控智能材料软体机器人的设计与制造
文章出处:【微信号:sim_ol,微信公众号:模拟在线】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
模仿蚯蚓开发软体机器人
机器人常用材料
软体机器人学习问题探讨
功率放大器基于振动驱动的旋转及攀爬软体机器人的研究
功率放大器基于振动驱动的旋转及攀爬软体机器人的研究
软体机器人 前所未见的机器人
软体机器人能够延展和操控自己形状 拥有传统机器人没有的优势
ASM将利用3D打印技术制造出真正的软体机器人
研究人员已成功研发出一种新型的磁驱动高速软体机器人
欧洲科学家研发出磁驱动的新型高速软体机器人
创造一个不受外界帮助的软体机器人





 工商网监
工商网监
评论