 现场控制可提高交流电机效率
现场控制可提高交流电机效率

到2035年,世界每年将消耗超过35万亿千瓦时的电力,而21年略低于2015万亿千瓦时。目前,近三分之一的电能用于为工业生产中使用的电机供电。这些电机中的许多基于简单的交流设计,因为它们成本相对较低且易于驱动。它们在能源使用方面也非常低效,尤其是在低速时。然而,这种交流电机本身并不是浪费。通过正确的电子控制形式,它们的效率可以大大提高。使用当今可用的控制技术,可以将给定工作水平的能耗降低多达60%。
目前使用的最简单的控制技术是伏特/赫兹。它在概念上既简单又易于在基本微控制器上实现。核心算法利用了交流电机设计的核心特性。每个电机都有一个特征的磁化电流,以及由此产生的最大磁通量和扭矩。这些属性通过伏特/赫兹比相关。电机通过围绕移动转子布置的定子线圈的开关转动,从而转动机械负载。线圈之间的切换迫使转子的磁化元件以平行方式转动,以移动到磁场保持平衡的稳定状态。
线圈切换频率的增加反过来又会提高速度。但是,如果没有相应的电能增加,施加的扭矩就会下降。伏特/赫兹控制提供了一种简单的解决方法,即随着频率的上升而增加线路电压,使转矩可以保持在恒定水平。不幸的是,这种关系在低速时并不是特别一致。需要更高的电压才能在低速时保持高扭矩,但效率会下降并增加线圈饱和和过热的可能性。
磁场定向控制提供了一种优化电机控制的方法,特别是在低速时,并且还提供了使电机定位控制更加精确的能力。这增加了交流电机的整体应用范围,有助于降低工业机械的成本和运营成本。
在磁场定向或磁通矢量控制中,伏特/赫兹控制所暗示的速度和扭矩之间的联系被打破。磁场定向控制的概念可以用绕线直流电机的模型来表达,其中提供给定子和转子的电流是独立的。在该模型中,可以独立控制产生的扭矩和磁通量。由电流产生的电机组内部的磁场强度决定了磁通量。提供给转子电磁绕组的电流控制扭矩 - 当磁场试图将自身对齐到稳定状态时。
直流电机使用转子上的换向器,该换向器执行控制定子上的哪些线圈在任何时候通电的工作。换向器的设计使得电流切换到机械对齐的绕组,以在该点产生最大扭矩。因此,绕组的管理方式使磁通发生变化,以保持转子绕组与定子中产生的磁场正交。
在交流电机中,只有定子电流受到直接控制。转子通常使用永磁体来提供其磁场。这意味着磁通和扭矩依赖于相同的电流。但是磁场定向控制提供了几乎独立操作它们的能力。在实践中,定子磁通是动态控制的,以提供独立操纵扭矩的能力。通常,可以驱动定子线圈,以便它们产生扭矩或沿定子轴线施加力,这种模式不会影响旋转。这些方向分别是正交轴和直轴。为了传递运动,每个线圈依次被驱动以产生高正交力。
使用几种数学变换来提供电流和电压变化的能力,以解耦转矩和磁通。在磁场定向控制过定子不同部分的电流由矢量表示。矩阵投影将三相时间和速度相关系统转换为双坐标时不变系统。坐标通常使用符号 d 和 q 来描述,它们分别表示磁通和扭矩分量。在(d,q)参考系中,施加的扭矩与扭矩分量线性相关。
在磁场定向控制下,从电机接收电信号并合并到(d,q)坐标模型中。该模型通常相对于转子计算,使所需通量的计算更容易。用于计算的典型方法是将克拉克变换和帕克变换配对。
克拉克变换获取来自不同相位(通常是三个阶段)的电流,并使用它们来估计笛卡尔坐标系中的电流。这些系统的轴使用符号 alpha 和 beta,而不是传统的 x 和 y,以减少与空间坐标系混淆的可能性。然后将这些矢量应用于 Park 变换,以提供在旋转 (d,q) 坐标系中看到的当前矢量。三角函数是变换的核心,需要使用微控制器或数字信号处理器(DSP)。
通过克拉克变换和帕克变换,(d,q)空间中电流矢量的磁通量和转矩分量来自馈送到每个电相的电流和转子磁通位置,在算法的大多数描述中采用符号theta。这种结构适用于一系列电机。逆公园变换用于产生电压输出,然后将其用于控制三相中每一相的功率的算法中。整体结构如图1所示。

图 1:用于磁场定向控制的变换和控制块的基本配置。
相同的磁芯结构可用于控制同步电机和感应电机,只需更改磁通参考并获得转子磁通位置即可。在同步永磁电机中,转子磁通量是固定的,因为它是由永磁体决定的。感应电机需要创建转子磁通才能正常工作,因此将其作为非零值合并到磁通参考中。
磁场定向控制成功的关键是实时预测转子磁通位置。这种控制策略很复杂。在交流感应电机内部,转子的速度与驱动其旋转的磁通量的速度不匹配。转子往往会滞后,导致称为滑移速度的差异。在较旧的方案中,电机制造商使用传感器来分析转子位置,但这会导致不必要的额外成本。在实践中,可以使用来自电机内部产生的电压和电流的反馈来补偿滑差。
许多系统使用测量的反电动势来估计转子打滑。反电动势电压的大小与转子的速度成正比。但是,使用此输入直接会导致低速或静止时出现问题,并且不容易估计初始位置。从未知的转子位置启动可能会导致电机意外倒车一小段距离或完全启动故障。简单地对反电动势进行采样的另一个缺点是它对定子电阻的敏感性,而定子电阻容易随温度变化。
基于模型的间接方案可提供更高的性能。计算开销和性能之间存在很强的权衡,但总的来说,通过使用更复杂的基于模型的算法可以提高效率,尤其是在低速时。基于间接模型的方案根据可用的传感器读数估计这些值的实时值。
与反电动势估计一样,核心问题是确定电机的起点。一种解决方案是从初始状态的估计开始,从中可以得出预测输出向量的初始状态,并将其与测量的输出向量进行比较。此差值用于校正模型的内部状态向量。但是,噪声会破坏模型的稳定性。
扩展的卡尔曼滤波器可以补偿噪声和突发干扰的影响。卡尔曼滤波器的架构允许被认为具有较低不确定性的更新被赋予比估计具有较大不确定性的更新更高的权重。过滤器以递归方式工作,因此每个估计只需要一组新读数和过滤器的先前状态即可生成新状态。
卡尔曼滤波器采用两个主要阶段:预测和更新。在预测阶段,滤波器根据前一个状态计算系统的下一个状态,在运动算法的情况下,该状态提供最后已知的速度和加速度值。由此,过滤器计算当前位置的预测。
在更新阶段,将新采样的电压和电流值与其预测值进行比较。输入数据与预测越接近,误差概率越低。该误差概率馈入卡尔曼滤波器增益。在算法层面,卡尔曼滤波器依赖于许多矩阵乘法和反演。因此,在电机控制中实现扩展卡尔曼滤波器的关键是高算术性能,这与磁场定向控制的其他方面一样。
为了实现在实时电机控制情况下每秒所需的许多算术运算,需要高性能MCU或DSP。[德州仪器 (TI)] 生产的 [TMS320F2833x 系列器件专为处理交流电机应用的典型计算负载而开发,由各种片上外设支持,有助于与电源转换电子设备集成。
TMS320F2833x 围绕高性能 32 位 CPU 构建,具有浮点支持,符合 IEEE754 单精度算术标准。通过实施符合 IEEE 标准的浮点单元,TMS320F2833x 可处理非常宽的数字范围,并内置对非数字 (NaN) 和被零除等错误的支持,从而简化了算法开发。哈佛架构与双 16 x 16 乘法累加 (MAC) 单元相结合,为基于矩阵和投影的操作提供了高吞吐量。为了提高精度,可以将这些单元连接在一起以执行 32 x 32 MAC。片上外设包括一个16通道模数转换器(ADC),用于对来自电机的电压和电流反馈信号进行采样。
作为 C2000 系列 DSP 增强型 MCU 的成员,TMS320F2833x 由 TI 数字电机控制库提供支持,该库提供可配置的软件模块,可重复使用以实现各种控制策略。该库由表示为模块的功能组成,除了用于闭环操作的控制模块和用于脉宽调制 (PWM) 等功能的外设驱动器外,还提供 Clarke 和 Park 等变换。
在电机控制情况下,PWM输出控制六个功率晶体管,这些晶体管共同向三个电相提供电压和电流。每相使用半桥晶体管配置。在这些情况下用于控制的常用算法是空间矢量PWM。与更简单的PWM技术相比,这减少了谐波,并采用八种开关状态。有六个活动状态和两个零状态,每个状态都是八个对应空间向量的目标状态。状态的排列方式是,两组互补状态在任何时候都处于活动状态。一组用于三个高边功率晶体管,另一组用于低边。该算法循环切换状态,以根据磁场定向控制模型的要求将电源切换到状态。TMS320F2833x 包括适用于采用空间矢量切换的软件控制的 PWM 硬件。总共 18 个 PWM 输出中有 150 个支持高精度控制,分辨率为 2 ps。结果是一个数字控制器,需要相对较少的外部硬件来管理功率晶体管,如图<>所示。
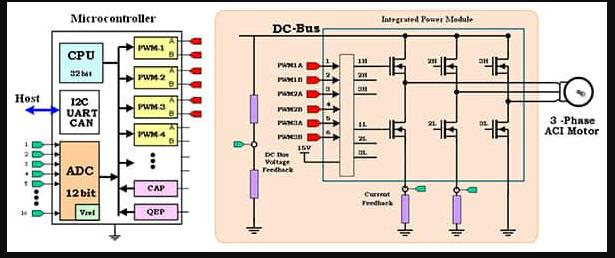
图 2:框图,显示了通过 F2833x 的 PWM 输出控制电源相位。
结论
利用具有必要内核和高性能构建模块的微控制器,结合 TI 数字电机控制库,设计人员已准备好驱动新一代高效交流电机。
-
dsp
+关注
关注
559文章
8219浏览量
364073 -
电机控制
+关注
关注
3595文章
2063浏览量
275330 -
直流电机
+关注
关注
36文章
1772浏览量
73499 -
交流电机
+关注
关注
3文章
394浏览量
34901 -
TMS320F28332
+关注
关注
0文章
2浏览量
5981
发布评论请先 登录






 工商网监
工商网监
评论