 协作/四轴/Delta机器人基本构成及特点
协作/四轴/Delta机器人基本构成及特点

工业机器人作为智能制造领域的代表。其中协作机器人、Scara机器人、Delta机器人大受欢迎,今天一起走进三类机器人,深入了解TA们——
协作机器人
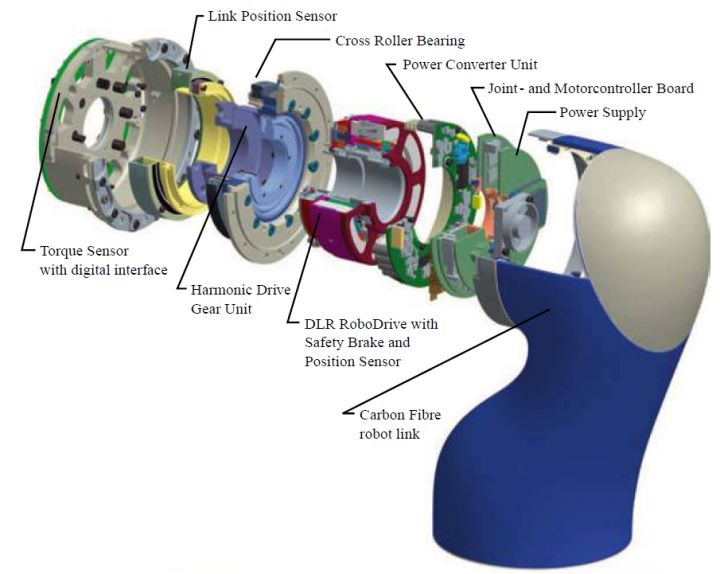
协作机器人是一种设计和人类在共同工作空间中能进行近距离互动的机器人,能够与人类在同一工作环境中并肩协同作业的新型工业机器人。为人机互动提供了安全保障,在构造和性能上兼具了人和机器各自的优点,尤其体现了人的灵活性和适应性。
其结构主要采用一体化关节模组结构,实现模块化关节设计。一体化关节结构集成了谐波减速器、中空电机、刹车装置、编码器等,利用中空电机驱动中空电机轴转动,经由谐波减速器减速后,输出动力。
协作机器人优缺点
优点
1)人机协作:充分发挥人与机器人的优势,依靠人解决精度及模糊控制问题,依靠机器人解决力控及稳定性能问题;
2)安全性高:采用先进的传感器,主动感知和适应变化的环境,控制算法添加防碰撞功能,规避与外部碰撞风险;
3)灵活易用:协作机器人主要突破点为软件控制系统,实现简便操控、编程;小型、轻巧、可移动、安装方便、即插即用。

缺点
1)负载低:一般在10kg以下;
2)结构刚性弱:较小的自重导致刚性不足;
3)速度慢:协作机器人要确保安全性,其电机需要兼顾安全保护的功能;
4)重复定位精度:相比传统机器人一般低一个数量级;
5)价格较高:为达到安全标准,还需要增加很多的安全传感器。
四轴机器人
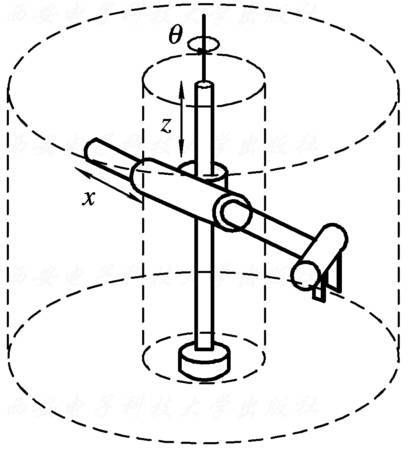
圆柱坐标型工业机器人结构示意图如图所示,有两个移动关节和一个转动关节,末端操作器的安装轴线的位姿由(z,r,θ)坐标予以表示,其主体具有3个自由度:腰部转动、升降运动、手臂伸缩运动。
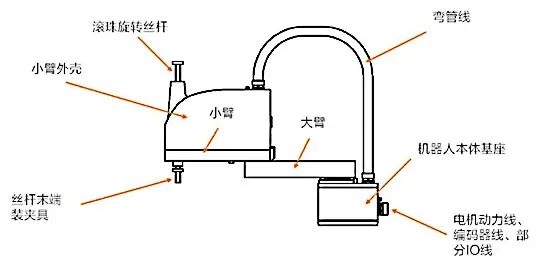
常规圆柱坐标机器人结构简易形式
SCARA机器人是一种圆柱坐标型的特殊类型的工业机器人,主要适用于处理高速和高重复性的工作任务,广泛应用于3C电子、包装、平面装配、检测等领域。
SCARA机器人优缺点
优点
1)运行速度快,精度高;
2)应用执行动作简单,可实现快速编程调试;
3)结构简易化,成本低;
4)安装空间小,轻松简易地结合外围,进而打造出精简、高整合性的机器人工作站。

缺点
1)负载较小;
2)臂展行程较短。
本公司对常规圆柱坐标机器人结构升级,臂端采用旋转摆臂式,推出HC系列类scara水平摆臂式四关节机器人。

产品优缺点
1)运动轨迹规划更灵活,臂端姿态调整更灵活,可有效实现壁障功能;
2)可执行笛卡尔坐标运行方式,可实现直线运动进、出压机工作区域;
3)负载范围广,负载范围涵盖3kg-20kg;
4)10kg以上负载能力可实现大板料冲压,专注应对大吨位压机,与市面常规应用案例相比性价比更高。
Delta机器人
并联机器人通过至少两个独立的运动链相连接,机构具有两个或两个以上自由度,且以并联方式驱动的一种闭环机构。
Delta机器人是并联机器人的一种, Delta机器人有分Delta2 和 Delta3机器人, 是根据自由度来区分的。Delta2只能在平面内运行, 而Delta可以在XYZ空间中运行, 在某些实际运用过程还会在运动链连接处增加一个工件姿态变换轴,实现工件在指定位置的姿态变换。
其驱动方式有电机驱动、气缸驱动、液压缸驱动三种形式,目前delta工业机器人上常用的就是电机驱动。
Delta机器人优缺点
优点
1)运行速度快,运行速度是衡量delta机器人性能主要指标。

缺点
1)由于使用该系列机器人长期短距离快速运行,易造成其减速机构齿轮组局部磨损,从而造成减速机传动精度降低影响整机精度;
2)安装空间尺寸大,个别还需定制专用机架安装机器人;
3)各运动链结构大多采用万向节连接,高速运行易磨损影响整机精度,需定期保养。
应用范围
食品、电子、药品等行业的加工、分拣、包装。
审核编辑:汤梓红
-
传感器
+关注
关注
2578文章
55811浏览量
795430 -
机器人
+关注
关注
214文章
31634浏览量
224512 -
工业机器人
+关注
关注
91文章
3557浏览量
98641 -
Delta
+关注
关注
1文章
30浏览量
13907 -
协作机器人
+关注
关注
2文章
544浏览量
31747
原文标题:协作/四轴/Delta机器人基本构成及特点
文章出处:【微信号:indRobot,微信公众号:工业机器人】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录




评论