 高速ADC精度的直流误差类型
高速ADC精度的直流误差类型
在任何设计中,信号链精度分析都是一项艰巨的任务。在本系列的第2部分中,讨论了许多误差,这些误差会在整个信号链中累积,最终被转换器看到。请记住,转换器是信号链的瓶颈,最终决定信号的表示精度。因此,选择转换器是设置整体系统要求的关键。本文将继续以这些知识为基础,分析在整个给定信号链中可能累积的直流误差类型。
两种类型的误差可以通过信号链累积:直流和交流。直流或静态误差(如增益和失调)有助于了解信号链的精度或灵敏度。交流误差(也称为噪声和失真)决定了系统的性能和动态范围
。理解两者都很重要,因为它们最终都决定了系统的分辨率。
本文将专门分析直流误差,分解与无源和有源器件相关的每个不准确性。将开发一个矩阵或电子表格,以显示如何通过不同的方法在信号中添加或累积误差。
本文回顾噪声基础知识,例如从交流角度进行带宽求和和误差累积,可以确定模拟信号链设计的整体SNR。
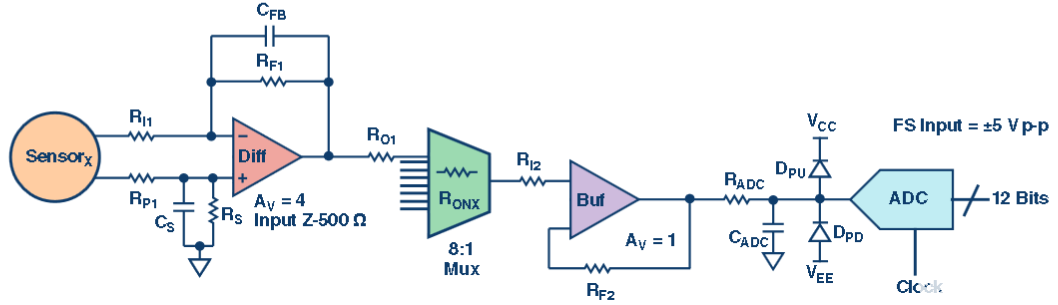
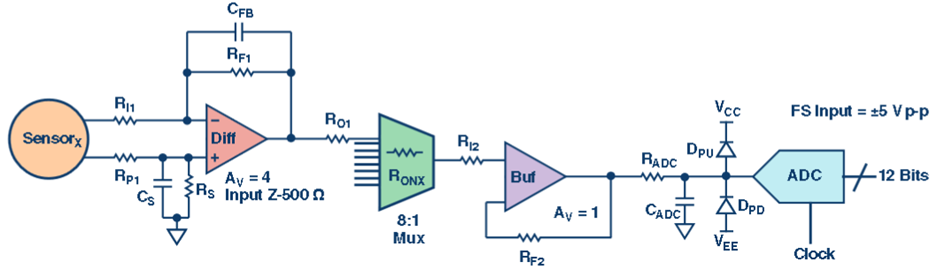
图1.这种简单的数据采集信号链系统旨在提供0.1%的精度。
信号链回顾
在第 2 部分中,目标是设计一个简单的数据采集系统,其精度可达 0.1%(图 1)。这意味着每1 V输入,输出为0.99388 V或1.00612 V。因此,假设满量程为10 V,转换器的动态范围为60 dB或9.67ENOB。它具有两级放大器、一个多路复用器和一个模数转换器(ADC)。传感器、电缆、连接器、印刷电路板(PCB)寄生效应以及任何外部影响/误差将在此分析中被忽略,因为这在很大程度上取决于设计人员试图测量的应用或信号。
要为每个错误定义参考,分析的每个阶段都应分解为单独的部分。数据采集信号链的第一级是一个简单的差动放大器(图 2)。该放大器的增益为4×,输入阻抗为500 Ω。电容器已就位,用于可选的滤波目的。
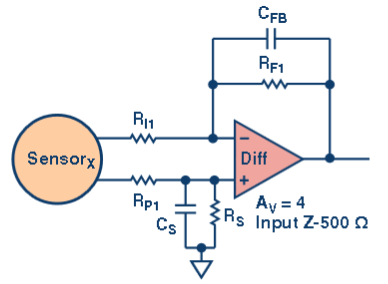
图2.差动放大器是数据采集信号链的第一级。
然后将放大器的输出信号施加到多路复用器的八个输入之一(图 3)。每个输入由一个阻尼电阻(RO),以最大程度地减少多路复用器通道切换带来的电荷反冲。每个通道内部都会有一些寄生或表征的RO根据多路复用器的数据手册规格。
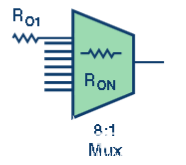
图3.这款 8:1 多路复用器具有 8 个缓冲输入。
然后,产生的通道信号被施加到单位增益缓冲级放大器(图 4)。施加电阻以最大限度地减小输入偏置电流不平衡。
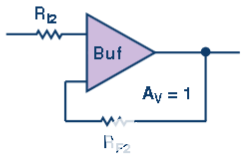
图4.通道信号将施加到这种类型的缓冲放大器上。
信号缓冲后,将其施加到 12 位、1 MSPS ADC,最终进入数字域(图 5)。串联电阻用于缓冲或阻尼放大器和转换器之间的信号,从而增加两个器件之间的源电阻。这最大限度地减少了从转换器到放大器的电荷反冲,就像多路复用器一样。这也有助于放大器输出稳定并防止其振荡。
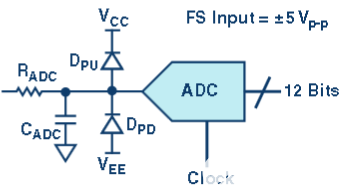
图5.信号经过缓冲后,将其施加到12位、1 MSPS ADC。
该电容提供一个简单的低通抗混叠滤波器(AAF),用于衰减目标频带外的信号和噪声。AAF 的设计在很大程度上取决于系统的设计和应用。最后,上拉二极管和下拉二极管增加了输入保护,使其免受可能施加于转换器输入的极端信号过载条件的任何故障条件的影响。
现在,所有信号链组件都已定义,让我们开始查看与每个阶段相关的误差。在以下部分中,将根据此处讨论的信号链的每个阶段来审查无源和有源误差。
直流无源错误
所有无源元件都有与之相关的误差,尤其是电阻器。电阻器看似简单的器件,但如果设计中没有正确指定,它们可能会在整个信号链中引起误差。此处不涉及选择正确类型的电阻器及其组成。但请记住,根据应用的不同,某些电阻类型可能比其他类型更适合。
电阻直流误差由非理想电阻容差引起。仅指定值容差是不够的。然而,对电阻误差容限过于严格也会导致收益递减,并使分析过于复杂。在为给定信号链指定电阻类型时,至少需要注意四个关键规格:
值容差,通常以 % 指定。
温度系数或漂移,通常以ppm/°C为单位。
生命漂移或资格,通常以 % 为单位指定,超过设定的量 小时(通常在 1000 秒内)。
值公差比,当两个或更多时以%为单位指定的值公差 电阻器存在于网络或同一封装中,并且匹配 在价值上。
为了举例说明电阻误差是如何累积的(图6),让我们看一下以下内容:一个100 Ω电阻,值容差为1%,漂移为100 ppm/°C,寿命容差为5%,在85°C温度范围内,在5000小时的使用寿命内,电阻为93.15 Ω至106.85 Ω:
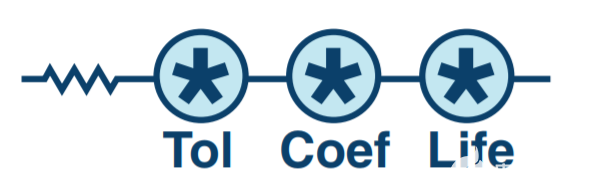
图6.此图说明了电阻误差模型。
总公差 (R价值( 1托尔( 1科夫( 1生命) = (R价值+ ((R托尔/100) × R价值)+ (((R科夫× 0.000001) ×温度范围) ×R价值) + ((R生命/100) × R价值))= 94 Ω 到 106 Ω。
很难找到信息 旁注:某些组件的使用寿命规格仅为 1000 小时。然而,设计可能需要更长的时间——比如10,000小时。要解决这个问题,不要将 1000 小时的数字乘以 8.77(8766 小时/年);这太悲观了。任何精密模拟电路中的长期漂移都会有一定程度的“随机游走”。取这个数字的平方根或 √8.766 = ~3× 1000 小时数字更正确。因此,10,000 小时寿命数字为 √10.000 = 3.16 × 1000 小时规格,依此类推。
应该注意的是,电容器和电感器也有误差。然而,这些误差通常可以忽略不计,对这种类型的直流分析没有实质性价值。这些器件本质上也是无功的,对滤波和带宽容差的影响最大,这同样不适用于此特定的直流分析。
直流主动误差
图1中描述的信号链具有最常见的构建模块,描述了一种实现数据采集系统的方法。它由两个放大器、一个多路复用器和一个ADC组成。但请记住,许多类型的有源器件描述各种信号链和不同的系统拓扑。在实施此类分析时,所有有源器件都会有某种直流误差。重要的是要确定需要考虑哪些错误,以了解所设计系统的准确性。
基本上,直流精度涉及两种类型/组的误差。这些错误对于所有活动设备都是单独的和全局的。单个活动设备错误将仅显示相对于该设备的已知直流误差。此类误差可在各自的数据手册中找到。例如,放大器的输入失调电压将被视为单个误差,因为该误差仅特定于该有源器件。
信号链或系统中的每个有源器件的全局误差相同,但根据有源器件的个别性能,全局误差会有所不同(图 7)。一个全局误差示例是总线电源和温度的线路调节。现在,让我们分解信号链中显示的三个有源器件的这些误差。
众所周知,放大器仍然远非理想。它们有许多误差,通常在数据手册中列出。失调电压和偏置电流是两个常见误差,但包括任何漂移误差、长期误差和隔离误差(如电源抑制比(PSRR))也很重要。表1列出了使用放大器时应考虑的以下误差。
| 规范 | 错误 |
|
输入失调电压漂移 (V/C) |
3.50 × 10–6 |
| 输入偏置电流漂移 (交流) | 200 × 10–15 |
| 输入偏置电流 (A) | 150 × 10–9 |
| 长期漂移(1000小时)(V) | 3.75 × 10–3 |
| 输入失调电流 (A) | 10 × 10–9 |
| 电源抑制比(PSRR)(dB) | –120 |
| 输入失调电压 (V) | 200 × 10–6 |
| 共模抑制比(分贝) | –80 |
多路复用器的误差通常比放大器少。导通电阻和通道隔离是影响最大的多路复用器直流误差。表 2 列出了使用多路复用器时应考虑的错误。
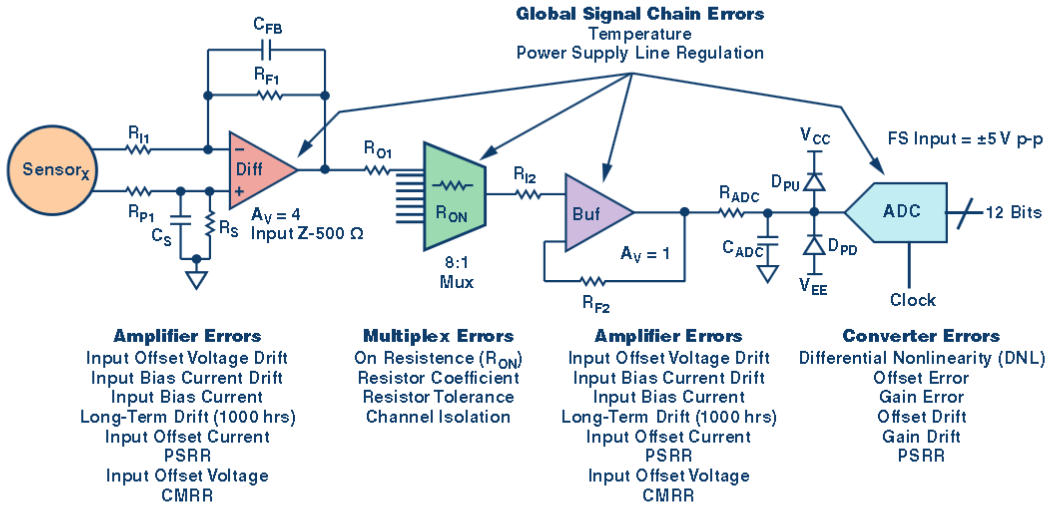
图7.有源器件存在两种类型的直流精度误差 - 单个和全局。
| 规范 | 错误 |
| 导通电阻 (R上5(5) | 400.00 |
| 电阻系数(ppm/°C) | 200.00 |
| 电阻容差 (%) | 20.00 |
| 通道隔离 (dB) | –70.0 |
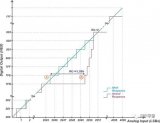
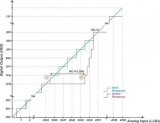
本系列的第一部分专门回顾了转换器误差(如下所示)。偏移、增益和 DNL 是众所周知且易于理解的。包括 PSRR 也很重要。使用第1部分的ADC时,应考虑以下转换器误差列表:
相对精度,DNL,定义为±0.5 LSB。
相对精度温度系数,DNL 温度系数,通常包含在 数据手册中的相对精度规格。
增益温度系数误差,为±2.5 LSB(来自上一个示例)。
偏移温度系数误差,比上一个示例±1.3 LB)。
电源灵敏度,通常以第一奈奎斯特区内的低频PSRR形式出现;对于 12 位,这通常可以表示为 60 dB 或 ±2 LSB 模数转换器。
为了使本文保持在合理的长度,本讨论将不详细介绍这些错误中的每一个是如何在有源设备本身中派生的。所有这些错误在各种论文和文本中都有明确的定义和描述。这里需要注意的重要一点是,所有基本误差都已考虑在内,以便分析足够稳健,可以满足系统的精度目标规格。
已建议并定义了单个活动设备错误。现在应考虑全局误差,这些误差会影响整个信号链(表3)。在这个简单的示例中,只有温度和线路调整率将作为全局误差考虑在分析中。但是,添加特定应用程序或设计可能固有的任何其他外部影响非常重要。
| 规范 | 错误 |
| 温度(°C) | –45 至 +85 |
| 电源线路调节 (%/V) | 50 × 10–3 |
将一切整合在一起
既然所有误差都已主动和被动定义,那么是时候将它们放入电子表格中以计算信号链的直流精度了。表 4 显示了完成此任务的一种此类方法。
尽管分析信号链精度的方法有很多种,但使用电子表格方法提供了最大的灵活性。它还提供了有关如何在信号链设计中压缩所有这些错误数的可靠理解。这种方法使设计人员能够在设计中可能考虑的许多合适器件之间快速有效地权衡。
花点时间制作一个布局良好且有序的电子表格。在顶部,定义了全局误差和信号链规格,因为这些数字会影响整个信号链的性能。放大器规格/误差也放在顶部,因为整个信号链中存在许多误差和两个放大器级。
继续向下,在电子表格的左侧,所有错误都分为每个电路阶段。电阻误差也按每级分组,以相应地了解权衡取舍。右侧显示了信号流入和流出每个阶段时的连续计算和误差累积。
在计算中,所有误差都以电压格式输入。这使得它更容易,因为转换器位于信号链的末端,并且具有以电压描述的输入满量程。RTO(指输出)用于描述从一个阶段到下一个阶段的连续错误累积。每个阶段还生成单独的总和 RSS(平方根)总计,以显示错误如何根据所使用的方法累积。
因此,表4中的最终结果显示总累积误差为±2.6%,RSS误差为±1.6%。这是针对本文中讨论的整个信号链,考虑到每个器件的数据手册规格以及前面所述的26°C全局条件。
总累积
精度可以通过多种方式计算,并且可以采取多种形式。根据设计人员如何看待这一点,应理解并记录它,以避免产生任何错误的结果。请记住,从第 1 部分开始,简单地取所有这些误差源的和方根 (RSS) 似乎过于悲观。然而,统计容差可能过于乐观(误差总和除以误差数)。找到整个信号链误差的实际容差应该介于这两种想法或方法之间。
因此,在整个信号链或任何精度系统分析中添加(累积)精度误差时,设计人员可以使用加权误差源方法(如第1部分的ADC示例所示),然后将这些误差源RSS在一起。这将为确定整个信号链的整体误差提供最佳方法。
结论
被动和主动设备都会发生许多错误。并非所有都很重要,但请记住那些对手头的信号链应用很重要。并非所有错误都对每个应用程序都有效。确定哪些误差最主要,哪些误差的影响或权重最大,对于任何直流精度误差分析都至关重要。本文开发了一个电子表格,以显示本文中的信号链示例如何满足<±2.0%精度的要求。
选择合适的无源器件可以对信号链和有源器件中的总累积误差产生同样大的影响。创建和分区电子表格可以简单而整洁地快速考虑许多不同的设备和权衡。最后,误差累积可以采取多种形式,最常用的做法是RSS精度方法。
然而,有些人可能会争辩说,误差的加权求和方法是确定真正的“最坏情况直流误差”的正确方法。否则,这很容易导致信号链被过度设计,导致更多的部件来补偿原始的一组误差。更不用说成本的增加以及设计的尺寸、重量和功耗(SWaP)。
| 信号链规格 | 价值 | 规范 | 最低 | 单位 | 最大 | |
| 输入信号(V) | 1 × 101 | 放大器规格 | ||||
| ADCNumber of Bits | 1.2 × 101 | 输入失调电压漂移(V/C) | 3.5 × 10–6 | V | 3.50 × 10–6 | |
| ADCInput 满量程(差分 VP-P)带边距 | 9.97 × 100 | 输入偏置电流漂移(交流) | 2 × 10–13 | 一个 | 2 × 10–13 | |
| ADCInput 满量程(差分 VP-P) | 1 × 100 | 输入偏置电流 | 1.5 × 10–7 | 一个 | ||
| ADCLSB尺寸(VP-P) | 2.44 × 10–3 | 长期漂移(V) (5000小时) | 3.75 × 10–3 | V | ||
| 温度范围(–50°C 至 +80°C) 1 = 26°C | 1 × 100 | 输入失调电流(A) | 1 × 10–8 | 一个 | ||
| 开尔文(K) | 2.9915 × 102 | PSRR (dB) | –1.2 × 102 | V | 3.50 × 10–9 | |
| 玻尔兹曼常数(W-s/K) | 1.38 × 10–23 | 输入失调电压(V) | 2 × 10–4 | V | ||
| LDO法规值(%/V) | 5 × 10–2 | 1圣阶段共模抑制比(分贝) | –8 × 101 | V | 5 × 10–4 | |
| 1圣级放大器 CMR(V) | 5 × 100 | ADC缓冲共模抑制比(dB) | –8 × 101 | V | 5 × 10–4 | |
| 放大器缓冲器 CMR(V) | 5 × 100 | En_op(V/√Hz) | 6 × 10–9 | V | 3.36 × 10–6 | |
| 电源电压 | 7 × 100 | In_op(纳安/√赫兹) | 8 × 10–13 | 一个 | 4.4829 × 10–10 | |
| 带宽(赫兹) | 2 × 105 | 噪声电压(VP-P) | 1.5 × 10–7 | V | 5.303 × 10–8 | |
| 诺西带宽(赫兹)—1圣-订单系统 | 3.14 × 105 | |||||
| 诺西带宽(Hz)—二阶系统 | 2.444 × 105 | |||||
| 输入 | 最低 | 单位 | 最大 | |||
| 1圣级放大器电路—差动放大器 | 总公差(RF1( 1托尔( 1科夫( 1生命) | 2.48122 × 104 | Ω | 2.49878 × 104 | ||
| 放大器增益(Av) | 1 × 100 | 总公差(RF1( 1托尔( <>科夫( 1生命) | 2.48745 × 104 | Ω | 2.49878 × 104 | |
| RI1(Ω) | 2.49 × 104 | 总公差(R小一( <>托尔( <>科夫( <>生命) | 1.24217 × 104 | Ω | 1.24939 × 104 | |
| RF1(Ω) | 2.49 × 104 |
总公差(RO1( <>托尔( <>科夫( <>生命 |
9.96475 × 101 | Ω | 1.003525 × 102 | |
| R小一(Ω)= RI1||RF1 | 1.245 × 104 | 总容差(增益 = RF1/RI1) | 9.954660 × 10–1 | 获得 | 1.0071 × 100 | |
| RO1(Ω) | 1 × 102 | 信号电平 | 9.9547 × 10 | V | 1.00707 × 101 | |
|
电阻系数(ppm/°C) |
2.5 × 102 | 输入电流失调 × R小一—反收购 | 8.748575 × 10–7 | V | 8.839525 × 10–7 | |
| 电阻容差(%) | 1 × 10–1 | 输入失调电压 — RTO | 4.060773 × 10–4 | V | 4.084398 × 10–4 | |
| 电阻寿命容差(%),5000小时 | 2.5 × 10–1 | 输入偏置误差 — RTO | –2.16197 × 10–5 | V | 2.17455 × 10–5 | |
| 1圣载物台总精度误差(总和) | 1.3831 × 10–3 | V | 1.4346 × 10–3 | |||
| 1圣载物台总精度误差(RSS) | 1.0774 × 10–3 | V | 1.0837 × 10–3 | |||
| 信号电平(总和) | 9.9560 × 100 | V | 1.00722 × 101 | |||
| 信号多路复用器 | 信号电平 | 9.9557 × 100 | V | 1.00718 × 101 | ||
| R上(Ω) | 4 × 102 | 总公差(R上( <>托尔( <>科夫) | 3.199200 × 102 | Ω | 4.8008 × 102 | |
| 电阻系数(ppm/C) | 2 × 102 | 通道间隔离误差 | 1.5811 × 10–3 | V | 1.5811 × 10–3 | |
| 电阻容差(%) |
2 × 101 |
|||||
| 通道隔离(分贝) | –7 × 101 | |||||
| 放大器缓冲电路 | ||||||
| 电阻系数(ppm/C) | 2.5 × 101 |
总公差(RI2( <>托尔( <>科夫( <>生命) |
55.9426 × 104 | Ω | 5.60574 × 104 | |
| 电阻容差(%) | 1 × 10–1 | 总公差(RF2( <>托尔( <>科夫( <>生命) | 5.61424 × 103 | Ω | 5.62576 × 104 | |
| 电阻寿命容差(%),5000小时 | 2.5 × 10–1 | 总容差(增益 = RF2/RI2) | 1.0015 × 100 | 获得 | 1.0056 + × 100 | |
| 单位增益缓冲器(Av) | 1 × 100 | 信号电平(总和) |
9.9727 × 100 |
V | 1.01305 × 101 | |
| RI2(Ω) | 5.6 × 104 | 信号电平 | 9.9724 × 100 | V | 1.01301 × 101 | |
| RF2(Ω) | 5.62 × 104 | 输入电流失调 × RI2—反收购 | 2.805049 × 10–4 | V | 2.805039 × 10–4 | |
| R模数转换器(Ω) | 3.32 × 101 | 输入失调电压 — RTO | 3.9595 × 10–3 | V | 3.9758 × 10–3 | |
| RE1(Ω), (二极管电阻) | 1 × 10–1 | 输入偏置误差 — RTO | 1.56844 × 10–5 | V | 7.43156 × 10–5 | |
| RE2(Ω),(二极管电阻) | 1 × 10–1 | ADC缓冲器总精度误差(总和) | 4.7564 × 10–3 | V | 4.8334 × 10–3 | |
| ADC缓冲器总精度误差(RSS) | 4.0009 × 10–3 | V | 4.0179 × 10–3 | |||
| 信号电平(总和) | 9.9775 × 100 | V | 1.01353 × 101 | |||
| 信号电平 | 9.9764 × 100 | V | 1.01342 × 101 | |||
| 模数转换器电路 | ||||||
| 线性度,INL(LSB)– 1.5 = DS | 1.5 × 100 | V | 3.6621 × 10–3 | |||
| 失调误差 (LSB) – 10 = DS | 1 × 101 | V | 2.44141 × 10–2 | |||
| 增益误差(%FSR)– 0.1 = DS | 1 × 10–1 | V | 1 × 10–2 | |||
| 失调漂移(ppm/C)– 30 = DSFT | 3 × 101 | V | 3 × 10–4 | |||
| 增益漂移(ppm/C)– 40 = DSFT | 4 × 101 | V | 4 × 10–4 | |||
| PSRR(dB)– 5 LSB = DSFT | –6 × 101 | V | 3.5 × 10–6 | |||
| 时钟速率,Fs(Hz) | 4 × 105 | ADC总精度误差 | V | 2.66403 × 10–2 | ||
| 理想的 12 位信噪比(dB) | 7.4 × 101 | 总精度误差(求和) | 3.43610 × 10–2 | V | 3.44895 × 10–2 | |
| 数据表 最小辛纳德 FS(dB) | 6.5 × 101 | 总精度误差 | 2.7007 × 10–2 | V | 2.70097 × 10–2 | |
| 数据表 ENOB(位) | 1.05 × 101 | 信号电平(求和) | 1.00041 × 101 | V | 1.01620 × 101 | |
| 信号电平 | 1.00031 × 101 | V | 1.01608 × 101 | |||
| 直流精度(± – %) | 1.5774 × 100 | % |
审核编辑:郭婷
-
传感器
+关注
关注
2525文章
48129浏览量
740191 -
转换器
+关注
关注
27文章
8212浏览量
141930 -
adc
+关注
关注
95文章
5653浏览量
539508
发布评论请先 登录
相关推荐
ADC模块误差的定义、影响和校正方法分享
谈谈ADC的分辨率与精度
浅谈ADC的分辨率与精度
影响单片机ADC转换精度的主要误差
分析信号链中累积直流误差最详尽的方法
量化高速ADC转换误差率的频率和幅度设计
深度解读高速ADC的转换误差率
高速模数转换器精度透视中的直流误差分析

一般静态模数转换器不精度误差和涉及带宽的ADC不精度误差






 工商网监
工商网监
评论