 通过设计进行生物设计:看看软机器人
通过设计进行生物设计:看看软机器人

机器人技术通过进入我们的家庭并通过其执行医疗程序和治疗应用程序正在重塑人们的生活。为了让机器人技术进一步进入人类生活,设计师必须采用以人为本的方法,重新设计金属和机械更少、更像人类的机器人设计。一些备受关注的领域包括合成皮肤以及灵活灵巧的手和四肢,使机器人能够正确地抓住物体——无论是轻轻地还是紧紧地。
随着机器人变得越来越便宜和易于使用,它们出现在各种各样的应用中,从医学到农业到科学探索和纺织装配线——其中一些是非常精细的工作。通过为机器人提供更自然、更像人的形式和社会存在感来使机器人人性化是一项艰巨的挑战。这种人性化需要综合生物科学、材料科学、机械和电子学的交叉,以使机器人的行为和看起来更像普通人。
软体机器人使用温和、顺应的机制和使用流体和柔性材料构建的执行器,能够进行广泛的运动,使它们更适合外骨骼或可穿戴设备。许多软机器人形式比传统的、更刚性的机器人更轻,它们的设计元素结合了类似肌肉的驱动、柔软的皮肤附件和电子可释放的弹簧元件。工程师们还在研究电活性聚合物、电粘附抓取和电层压板在软体机器人中的作用——所有这些开发最终都可以帮助人类与机器人舒适地融合,获得超人的力量和能力。
来自机器人的人造肌肉有可能从根本上改变许多类型的工业、医疗、消费、汽车和航空航天产品的动力和操作方式。由于质量更轻、物理尺寸更小、可闻噪声更低和成本更低,因此与基于电磁的技术相比,它们具有显着优势。此外,它们提供更多控制,其固有的配置灵活性使机器人能够更接近人类灵活性和机动性的极限。用聚合物制造机器人——特别是模量与人类皮肤相当的弹性体——自动消除了与人和机器人交互有关的许多安全问题。
制造可以复制人手细腻触感的机器是一项极其复杂的工作。软机器人工程师已经试验了许多不同的形式,从柔软的斑点到蟒蛇启发的爪子到电粘附。科学家们在开发柔软的抓手方面也取得了进展,这些抓手使用分层皮瓣和带有硅酮皮肤涂层的预拉伸弹性体,其作用类似于人手上的拇指和食指。
富有表现力的手将使机器人自然而然地俘获人们的心灵和思想,因为未来的相遇将更加人性化。模仿人类的手势,如握手、竖起大拇指表示一切顺利、手指交织等,将证明可以缓和人类对这些软机器人发展的情绪。
使这一趋势成为现实的一家公司是Molex。Molex 是一家领先的电子元件和解决方案供应商,致力于为客户带来创新,从而推动这些变革。Molex 通过创建开创性的电子解决方案来解决复杂的客户挑战。Molex 的 Temp-Flex 电缆提供解决方案来协助这些创新。Temp-Flex 产品可承受极端条件和恶劣环境,其所有标准产品线均符合有害物质限制 (RoHS) 合规标准。Temp-Flex 是一家受人尊敬的行业领导者,拥有创新的设计和优质的制造工艺,可提供全球客户所需的创新解决方案和特种电线电缆解决方案。Temp-Flex 电缆对人类使用具有生物相容性,非常适合用于人类生物力学性能衍生的机器人应用。
Temp-Flex Micro 微型带状电缆是具有可布线性的带状格式的医疗产品。Temp-Flex 的微型带状电缆具有生物相容性并具有出色的同心度。这些电缆包括 50AWG (0.0254mm) 和更大的电线,无针孔绝缘小于 0.0762mm。Temp-Flex MediSpec 微型同轴电缆是满足同轴需求的相关产品,具有严格的公差、高介电耐压和出色的同心度。这些电缆展示了柔性电介质的坚固性。FEP 和 PFA 是聚四氟乙烯 (PTFE)(通用商品名:Teflon)的替代品,(C 2 F 4 ) n和外径小至 0.24 毫米的 ePTFE 胶带缠绕结构。Temp-Flex 提供范围广泛的护套材料,包括但不限于 EFTE、PVDF、PVC、TPE、Pebax 和聚氨酯。
软体机器人研究正在激发新材料和技术的设计,这些新材料和技术能够感知特定线索,例如压力、来自不同方向的力和振动。软体机器人可以在活动推广、休闲娱乐、研究、培训和教育、医疗保健、医疗服务、零售和酒店等领域为类人服务机器人提供市场机会。这项技术表明它将改善人类与机器人之间的体验和关系。它将通过设计机器人来实现一个包含更充分实现的、类人的、综合生物力学的性能水平。
审核编辑黄昊宇
-
机器人
+关注
关注
215文章
31782浏览量
224941
发布评论请先 登录
江智康养机器人
基于米尔RK3576核心板的国产割草机器人解决方案
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
智能机器人从0到1系统入门课程 带源码课件 百度网盘下载
中国工程院院士杜善义率队调研软通天枢机器人
探索RISC-V在机器人领域的潜力
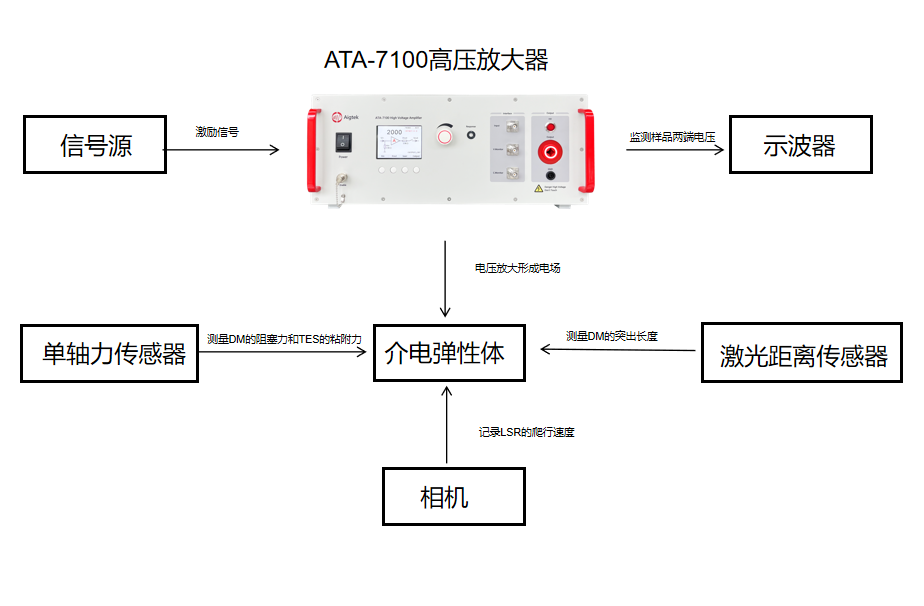
高压放大器在介电弹性体制成的软机器人研究中的应用
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
小萝卜机器人的故事
自制巡线解迷宫机器人(上)
什么是机器人?追溯机器人技术的演变和未来

机器人竞技幕后:磁传感器芯片激活 “精准感知力”
介电弹性体软机器人研究:高压放大器的应用实践




评论