 加速ROS2为机器人带来自适应计算能力
加速ROS2为机器人带来自适应计算能力

从ROS到ROS2
机器人的自适应计算
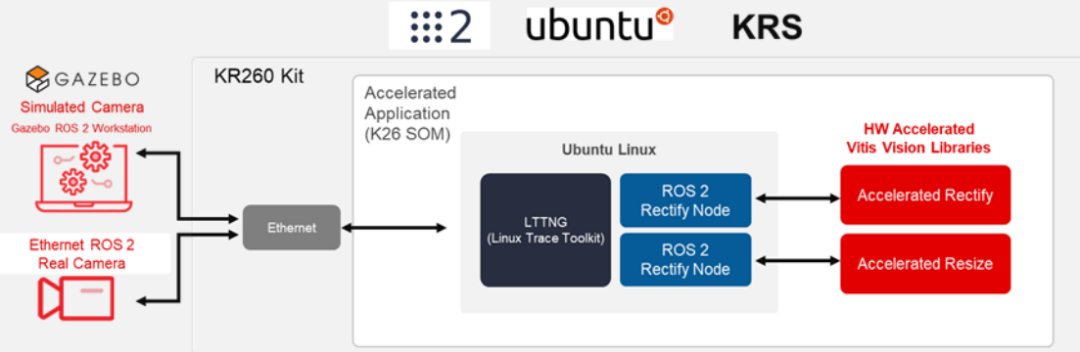
ROS2与机器人自适应计算


写在最后


更多热点文章阅读
马斯克:预计6个月后进行大脑芯片的人体试验,愿意给自己孩子植入 硅料降价拐点来临,光伏市场有望重启装机潮 造车新势力11月销量:哪吒第一,蔚理进前三,小鹏依旧垫底 行业机构频发警报 2023年全球半导体市场面临下滑风险 富士康失去iPhone 14 Pro独家代工资格!立讯和硕上位,果链格局大变?
原文标题:加速ROS2为机器人带来自适应计算能力
文章出处:【微信公众号:电子发烧友网】欢迎添加关注!文章转载请注明出处。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
电子发烧友网
+关注
关注
1012文章
544浏览量
166911
原文标题:加速ROS2为机器人带来自适应计算能力
文章出处:【微信号:elecfans,微信公众号:电子发烧友网】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
探索RISC-V在机器人领域的潜力
运行ROS 2,充分证明了RISC-V架构完全有能力承载机器人操作系统这样的复杂软件栈。它不仅是学习RISC-V的绝佳工具,更是探索未来边缘计算
发表于 12-03 14:40
高精度机器人控制的核心——基于 MYD-LT536 开发板的精密运动控制方案
处理器,支持 1.8 GHz 主频,并集成2Tops NPU、G2D、VPU 4K高清视频编解码器,为复杂控制算法与视觉融合计算提供充足算力。米尔MYD-LT536开发板
在“高精度
发表于 11-14 15:48
创龙 瑞芯微 RK3588 国产2.4GHz八核 工业开发板—ROS2系统使用说明
本文围绕创龙科技研发的评估板,详解 ROS2 系统使用方法。涵盖 ROS2 环境搭建、核心概念讲解、节点通信测试、功能包创建与编译,以及可视化工具 RViz 的使用,还包括基于评估板的 ROS2 应用案例演示,帮助开发者快速掌握

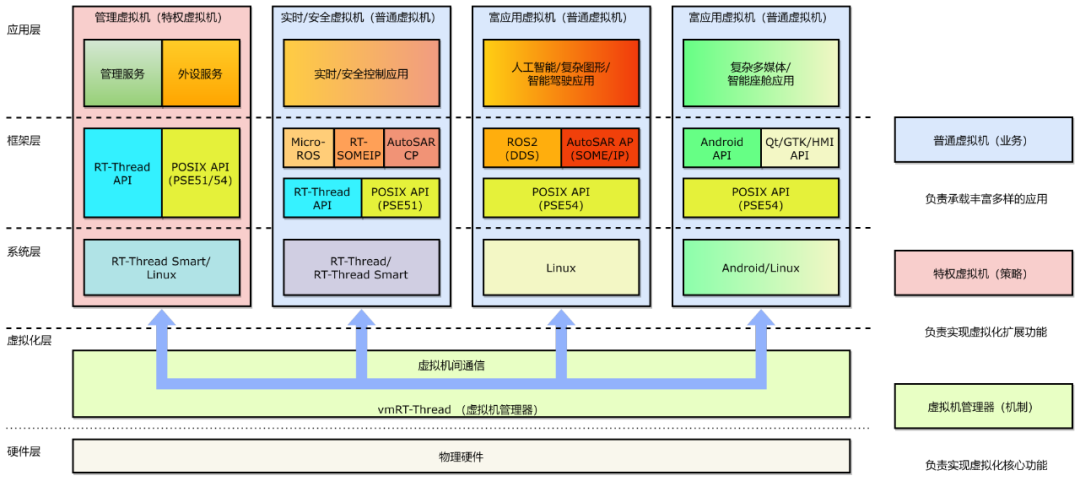
通过vmRT-Thread和ROS2赋能机器人智能开发
随着机器人技术的快速迭代升级,协作机器人、复合移动机器人和人形机器人等新兴应用场景对实时控制与智能决策的深度融合提出了迫切需求。然而,当前机器人
【「# ROS 2智能机器人开发实践」阅读体验】视觉实现的基础算法的应用
。
学习建议
对于初学者,建议先通过仿真(如Gazebo)验证算法,再迁移到真实机器人,以降低硬件调试成本。
多参与开源社区(如ROS2的GitHub项目),学习前沿技术并贡献代码,是快速提升实战能力
发表于 05-03 19:41
【「# ROS 2智能机器人开发实践」阅读体验】机器人入门的引路书
的非常好的,特别是一些流程图,很清晰的阐释了概念
很适合作为初学者入门的引路书
还能了解很多技术和框架,破除初学者的自负困境,让初学者知道功能是由很多开发者维护的,前人已经为各种产品搭建了完善的框架。避免陷入得一个人单打独斗的错觉
一直蠢蠢欲动
发表于 04-30 01:05
【「# ROS 2智能机器人开发实践」阅读体验】+ROS2应用案例
地图构建,包括算法原理介绍、安装与配置方法、仿真环境中的SLAM以及真实机器人上的SLAM。
这一过程不仅涉及到计算机视觉和机器人学的知识,还需要对ROS
发表于 04-27 11:42
【「# ROS 2智能机器人开发实践」阅读体验】+内容初识
机器人技术的飞速发展,ROS 2 作为其核心工具之一,为开发者提供了强大的支持。与传统的理论书籍不同,本书深入浅出地讲解了 ROS
发表于 04-27 11:24
大象机器人携手进迭时空推出 RISC-V 全栈开源六轴机械臂产品
全球80多个国家和地区。
近日,大象机器人联合进迭时空推出全球首款RISC-V全栈开源六轴机器臂“myCobot 280 RISC-V”,为开发者打造全新的机器人开源创新平台。
“my
发表于 04-25 17:59
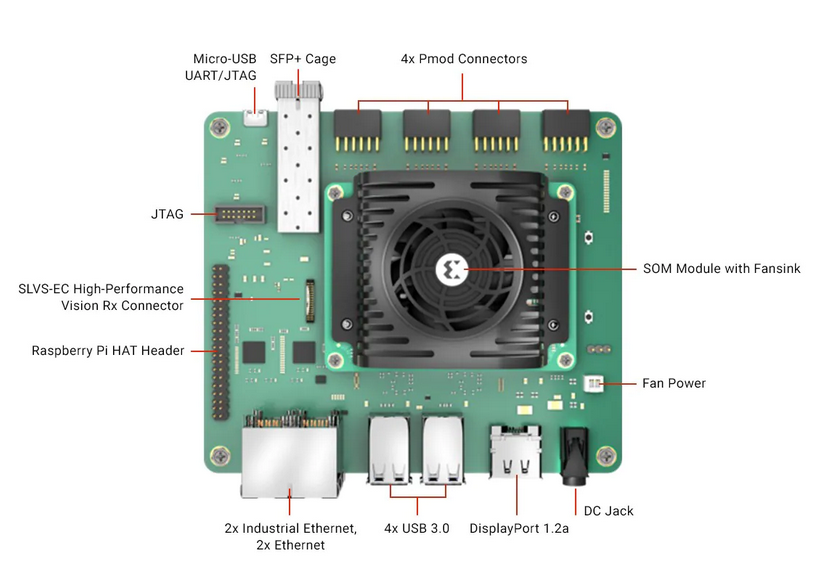
机器人开发套件 Kria KR260
AMD/XilinxKria KR260机器人入门套件是一款基于Kria K26 SOM的开发平台,设计用于机器人和工业应用。它具有高性能接口和原生ROS2支持,便于机器人和软件开发人
名单公布!【书籍评测活动NO.58】ROS 2智能机器人开发实践
手机为平台的移动互联网时代,下一个以机器人为核心的智能机器人时代,是否也会遵循这样的逻辑?
随着ROS 2的诞生,智能
发表于 03-03 14:18
使用myCobot 280机械臂结合ROS2系统搭建机械分拣站
这篇文章是来自Automatic Addison的开源项目,已获作者授权转载自github。本项目的主要内容是使用myCobot 280机械臂结合ROS2系统搭建机械分拣站。

《具身智能机器人系统》第10-13章阅读心得之具身智能机器人计算挑战
阅读《具身智能机器人系统》第10-13章,我对具身智能机器人的工程实践有了全新认识。第10章从实时性角度剖析了机器人计算加速问题。
发表于 01-04 01:15
ROSCon China 2024 | RDK第一本教材来了!地瓜机器人与古月居发布新书《ROS 2智能机器人开发实践》
12月7日-8日,为期两天的ROSCon China 2024在上海圆满落幕,来自全球的ROS专家学者、开发者、企业代表齐聚一堂,共享机器人前沿技术成果。地瓜机器人携手众多RDK生态产






 工商网监
工商网监
评论