 多任务系统中的堆栈使用
多任务系统中的堆栈使用

在使用μC/OS的多任务应用程序中,main()启动后首先使用系统C栈,在OS启动后使用任务栈。
基于μC/OS-II或μC/OS-III编写应用代码时,用户必须为每个任务声明一个堆栈,用于任务运行现场及保存任务上下文(CPU寄存器)。在多任务处理开始之前执行的C代码将使用C栈。只有当应用程序的第一个任务开始运行时,栈才会从C栈中转移到任务栈。
不同的微控制器栈的实现也不同,许多32位处理器支持多个栈。例如,ARM Cortex-M内核有两个栈指针,分别指向主栈和进程栈。在基于μC/OS-III的应用中,多任务开始前使用主堆栈,其空间为链接命令文件中定义的堆栈区域。当应用程序调用OSStart()函数启动多任务时,进程堆栈指针被设置为第一个任务堆栈的栈顶地址,并修改控制寄存器,使任务开始运行时使用该堆栈。同时,主堆栈指针被用来指向μC/OS-III的中断堆栈OSCfg_ISRStk[]。后续多任务系统运行过程中,此堆栈将专门用于中断和异常处理程序。多任务启动后,C堆栈会丢失,导致嵌入式应用中可用的RAM量减少,在资源有限的应用中,可以重用C堆栈空间,用于任务堆栈,具体实现可以参考文章:技术小课堂| µC/OS-III的应用中CSTACK重用
由于main()对C堆栈的依赖,必须确保为这个堆栈留出足够的空间。如上所述,µC/OS-III用户还必须知道OSCfg_ISRStk[]栈的大小。OSCfg_ISRStk[]是一个数组,类似于任务堆栈,其大小由内核配置常量OS_CFG_ISR_STK_SIZE决定。另一方面,C堆栈的大小通常直接提供给链接器,因此在不同开发环境中对该堆栈进行更改的方法是不一样的。
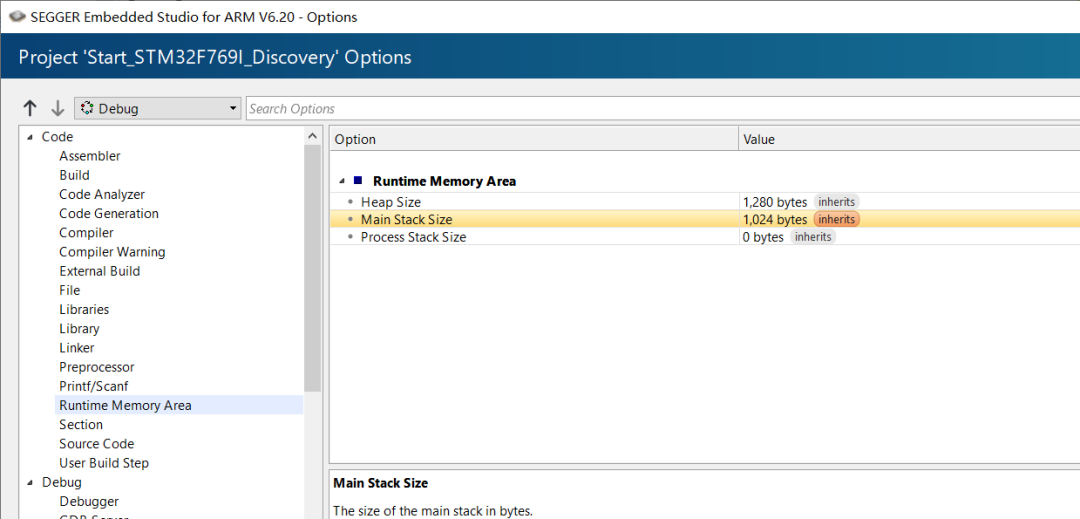
在Segger Embedded Studio中,Cortex-M的应用中main()使用的堆栈通常被命名为stack,可以通过工程options菜单进行堆栈配置,无需直接更改链接器文件。
如果基于μC/OS-III官方示例工程开发,通常不需要修改C栈的大小。这些工程已为main()的执行分配了足够的空间。不过,中断堆栈大小的定义OS_CFG_ISR_STK_SIZE可能需要进行一些调整。对于使用独立中断堆栈的应用,如果不在中断处理程序增加复杂的函数调用,示例的默认大小即可满足需求。
基于μC/OS构建的系统在main()运行过程中依赖C堆栈,一旦调用OSStart()后,系统就切换到任务堆栈,以便开始多任务处理。
审核编辑 :李倩
-
微控制器
+关注
关注
49文章
8910浏览量
166041 -
寄存器
+关注
关注
31文章
5624浏览量
130646 -
堆栈
+关注
关注
0文章
184浏览量
20609 -
应用程序
+关注
关注
38文章
3347浏览量
60509
原文标题:多任务系统中的堆栈使用
文章出处:【微信号:麦克泰技术,微信公众号:麦克泰技术】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
【RA-Eco-RA4M2开发板评测】+ FreeRTOS多任务初探
在学单片机时在堆栈遇到的问题分享
STM32开发中的五大嵌入式系统
一文说透了如何实现单片机的多任务并发!
什么是嵌入式操作系统?
单片机堆栈解析
FreeRTOS任务和协程的区别是什么
堆栈的定义,堆栈的使用方法
一句话,多个命令同时执行,AI语音模组也能多任务处理?
爱普科技PSRAM加速wisun无线模块多任务处理
揭秘LuatOS Task:多任务管理的“智能中枢”
多任务处理卡顿频发,无风扇工控机如何优化性能?聚徽厂家一文读懂
快速入门——LuatOS:sys库多任务管理实战攻略!



评论