 工业及机器人采用dToF传感器TMF8801/8701测量方案
工业及机器人采用dToF传感器TMF8801/8701测量方案

随着AI,机器人及自动控制系统研究和开发的深入,越来越多的应用方向开始评估和应用高精度测距方案。例如智能化人机交互,工业和汽车的高精度监控和控制等。当下常用的测试方案包括人体红外检测,超声检测等方式适合做存在检测或区域检测,方案本身设计的低抗干扰性限制了其测量的精度。飞行时间方案,特别是直接飞行时间方案,依据其本身的光学特性,极大提高了测试精度,从而被越来越多的应用采纳。
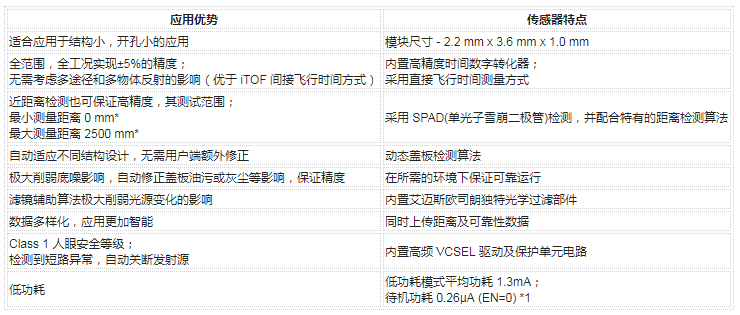
艾迈斯欧司朗直接飞行时间测距传感器 TMF8801/8701,采用完整模组化设计,其包括接收端SPAD(单光子雪崩二极管),时间和数字转化单元TDC,集成化算法固件,发射端VCSEL(垂直腔表面激光发射器)阵列。目前量产的产品可覆盖0-2.5m的测量范围,其全范围、全工况测量精度可达±5%,室内长距离测量精度<1%。
高精度dToF应用广泛
相机自动对焦
系统辅助低功耗应用(3D系统中物体预判)
存在及应用检测
沿边检测
快速距离检测应用
避障
无人机着陆辅助控制
精度测量
高红外环境下距离测量
方案优势及特点
审核编辑:郭婷
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
传感器
+关注
关注
2577文章
55513浏览量
793965 -
机器人
+关注
关注
213文章
31452浏览量
223678 -
AI
+关注
关注
91文章
41146浏览量
302609
原文标题:下载丨工业及机器人用高精度短距离dToF测量方案
文章出处:【微信号:艾迈斯半导体,微信公众号:艾迈斯欧司朗】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
基于米尔RK3576核心板的国产割草机器人解决方案
GPIO中断引脚连接升降传感器和倾倒传感器,一旦检测到机器人被抬起或倾斜,芯片立即下达刀片急停指令,符合国内CCC安全认证要求。
4. 人机交互:国产通信与OTA升级
通过核心板集成的Wi-Fi 6
发表于 04-24 17:31
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
“盲动”变成“感知运动”
普通机器人靠编码器控制位置,只能“按死命令走”。而关节扭矩传感器实时测量每个关节受到的扭转力,精度可达0.01牛米,采样频率高达1000赫兹(每秒反馈1000
发表于 04-17 17:27
Neway电机方案在机器人技术方面的优势
采购率超85%,交货周期缩短至2周,紧急订单可72小时交付,确保工业机器人厂商的生产连续性。二、高功率密度与小型化设计,节省布局空间背景:工业机器人关节驱动
发表于 03-30 09:39
安森美传感器芯片创新突破机器人感知边界
随着机器人技术从工业自动化向服务、医疗、特种作业等多领域深度渗透,传感器作为机器人的“感知器官”,其性能直接决定了机器人的环境认知、精准控制
赋能机器人“慧眼”:TMF8829 48x32 多区 dToF 传感器,定义避障新高度
。 ams OSRAM 推出的旗舰级 dToF(直接飞行时间)传感器 TMF8829 ,凭借其革命性的多区域探测能力与极高的环境适应性,正成为机器人避障领域的理想之选。 1. 80°
Melexis推出适用于机器人、工业及移动出行应用的16位电感传感器
全球微电子工程公司Melexis宣布,推出新版本双输入电感传感器接口MLX90514,专为机器人、工业及移动出行应用设计,通过其SSI输出协议提供具备高抗噪能力的绝对位置信息。 在机器人

高精度机器人控制的核心——基于 MYD-LT536 开发板的精密运动控制方案
控制”应用中,系统必须具备高计算力、低延迟控制环路、实时反馈和多传感器融合能力。
传统的PLC或单片机方案在高并发计算与多轴同步控制方面往往性能不足,因此越来越多的工程师开始采用基于高性能SoC平台
发表于 11-14 15:48
人形机器人传感器产业链最新分析:力、触觉、IMU、视觉传感器为主流!(全面)
环境的视觉、触觉、力觉,到维持自身平衡与定位的惯性测量等,各类传感器的性能与技术进步直接决定了人形机器人的智能化水平与应用场景拓展能力。当前,人形机器人

机器人领域中的温度传感器技术及其应用:机器人温度监测,提升机器人工作稳定性
随着机器人技术的发展,机器人在工业制造、物流管理、医疗护理等领域得到了广泛的应用,而 机器人的温度控制与监测 则是机器人操作和维护的

揭秘工业 4.0 机器人:感知、安全和控制技术
范围内的可扩展部署。这些系统需要传感器、安全硬件、电路保护和控制组件,以满足高带宽、实时响应和严格功能安全标准的要求。 本文探讨了支撑工业 4.0 机器人技术的基础技术,重点介绍 SICK 传

机器人竞技幕后:磁传感器芯片激活 “精准感知力”
地磁基准的惯性导航系统可持续提供可靠数据。实测显示,搭载昆泰芯 KTM59 系列融合磁传感器的机器人,在复杂动态环境中定位可靠性达 99.7%,较单一传感器方案提升 27%。
磁
发表于 08-26 10:02
工业机器人的特点
的基础,也是三者的实现终端,智能制造装备产业包括高档数控机床、工业机器人、自动化成套生产线、精密仪器仪表、智能传感器、汽车自动化焊接线、柔性自动化生产线、智能农机、3D 打印机等领域。而智能制造装备中
发表于 07-26 11:22
0.01°微小变化精准捕捉,机器人姿态传感器革新
电子发烧友网报道(文/莫婷婷)在人形机器人中,传感器是实现感知能力的关键技术,高性能惯性测量单元(IMU)等姿态检测传感器在其中发挥着重要作用。中金研究预计,2030年

工业通信界的“月老”:CC\\-Link IE和DeviceNet如何牵起机器人的“红线”
。
某机械制造企业就曾遇到过“通信尴尬”。新购入的工业机器人只支持CC-Link IE,而车间里的传感器、执行器等老设备还在用DeviceNet网关协议,导致“新老设备”各说各话。工程
发表于 06-12 14:35
详细介绍机场智能指路机器人的工作原理
机场智能指路机器人主要依靠感知系统、定位系统、导航系统、智能交互系统和运动系统协同工作,来实现为旅客准确指路和提供服务的功能,以下是其详细工作原理:
感知系统
传感器类型 :机器人配备了多种传
发表于 05-10 18:26



评论