 一种基于可靠度估计的到达时间差滤波方法
一种基于可靠度估计的到达时间差滤波方法

摘 要 :由于硬件资源、应用环境等条件限制,各接收站采集的信号中不可避免存在噪声,因此,高精度的到达时间差测量仍极具挑战。文中给出了一种基于可靠度的信号到达时间差滤波方法,在一段时间内采集多组信号,对各组信号进行独立的时差测量和可靠度估计 ;根据可靠度估计滤波算法,滤除低于预设可靠度阈值的测量时差,降低不确定时延导致的误差,提高了单组信号时差测量的准确度。
0 引 言
到达时间差(Time Difference of Arrival, TDOA)是一种常用的无线信号源定位技术 [1-4]。它通过测量信号到达各接收站接收天线的时间差,来计算信号源到达各接收天线的距离差,从而计算出信号源的位置。使用该技术进行定位时,到达时间差的测量准确度决定了定位准确度。
影响到达时间差测量准确度的因素主要包括 :各接收站之间的时间同步性、接收信号带宽、接收机采样率等,尤其当信号在空气中非视距传输时,受到应用环境中建筑物、树木等障碍物的影响,信号传输到各接收天线的过程中,可能会出现反射、衍射、散射等现象,使得接收信号引入不确定时延,即测量到达时间差偏离视距距离差,最终导致目标定位不准确 [5-8]。
在实际应用环境中无法做到无遮挡。因此,如何在系统硬件资源、环境因素不变的情况下,利用信号处理技术提高到达时间差的测量准确性,是一个有实际意义且富有挑战的课题。
1 可靠度估计与滤波算法
本文所提方法主要解决非视距传输时接收信号引入的不确定时延,即在信号带宽、采样率确定、环境因素不可避免的情况下,如何提高两路信号到达时间差测量准确度的问题。为解决上述问题,提供了一种基于可靠度估计的时差测量滤波算法,该方法对一段时间内的多个时刻点获取的几组信号进行时差测量,然后计算每个独立时差的可靠度,最终滤除可靠度低的时差。在上述方法中,假设多组信号采集过程中,信号源的位置基本不变,因此,使用该方法时,应根据信号源移动速度选取采集组数和采集时间间隔。
1.1 互相关法测量时差
设 2 个接收站 S1 和 S2,在一段时间 [tmin, tmax] 内的 X 个时刻点 (t1, t2, ..., tX) 采集了 X 组信号。设该段时间内,信号源位置变化很小,可忽略不计(依据信号源移动速度,通过对tmax-tmin 进行合适选取设计,可满足该假设条件)。
各接收站通过接收天线接收到信号后,通过接收机信号放大、下变频、A/D 采样等处理后,将得到同相分量 I 路与正交分量 Q 路信号,fs 为接收机 A/D 采样频率。设接收站S1 在 t1 时刻采集的信号经过处理后,得到的同相信号分量为I1t1(n)、正交信号分量为 Q1t1(n),接收站 S2 在 t1 时刻采集的信号经处理后的同相信号分量为 I2t1(n),正交信号分量为Q2t1(n),则接收站 S1、接收站 S2 在 t1 时刻的信号幅度序列A1t1(n)、A2t1(n) 可表示为 :
设 Rt1(m) 为 2 个信号幅度序列的互相关函数,通过求互相关峰值对应的时间变量可求得 2 个序列的时差。

式中:m 为时间变量,表示将信号延迟或提前 m 个采样间隔周期;|·| 为求绝对值运算; 当 (n+m) [1, N] 时,A2t1(n+m)=0;M 为算法预设参数,设系统监控区域为 D,当信号源处于该区域内任一位置时,信号源与接收站 S1、接收站 S2 的最大视距距离差为 Lmax,M 可由下式计算得到:

式中:c 为电磁波在空气中的传播速度,c ≈ 3×108 m/s;fs为 A/D 采样频率。
当互相关最大时,此时对应 2 个信号的时差。即求出互相关最大时的时间变量 ,然后换算为时间差 TDOAt1,如下所示 :
1.2 测量时差可靠度估计
计算时差互相关时,互相关函数的峰值越凸起,则该时差测量值越可信,即可靠度越高。定义时差测量值的可靠度为 Dept1,可按下述方法进行估计。
(1)计算出互相关的峰值 Rmt1ax :

(2)将互相关函数 Rt1(m) 归一化到 [0, 1] 区间,设归一化后的互相关函数为 t1(m) :

(3)求归一化的互相关函数 t1(m) 的平均值 t1ave:

(4)求时差测量值 TDOAt1的置信度 Dept1:

1.3 时差滤波算法
求出 2 个接收站在 X 个时刻点(t1, t2, ..., tX)采集到的信号的时差(TDOAt1, TDOAt2, ..., TDOAtX),以及它们对应的可靠度(Dept1, Dept2, ..., DeptX)。预设可靠度阈值为 DepLth,时差滤波算法是将可靠度低于阈值 DepLth的时差滤除。

2 实验结果
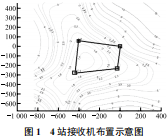
为测试可靠度估计的时差测量滤波算法的有效性,搭建测试平台,4 个接收站通过与处理中心相连,站与站之间相距约 500 m,在处理中心的控制下,在指定时刻开始采集200 组数据,2 个相邻时刻相差 10 ms,采样率 fs=14 MHz,各接收站每次采集 N=4 096 个点,输出 IQ 两路信号。4 站接收机布置示意图如图 1 所示。
将信号源分别置于 4 站接收机所包含区域的东、西、南、北、中 5 个定点位置进行 TDOA 定位测试,在可靠度估计滤波算法使用前和使用后分别计算定位误差,对比结果见表 1、表 2 所列。
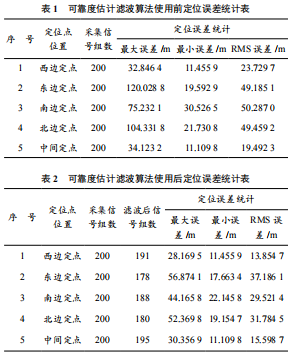
通过测试对比,证明可靠度估计滤波算法可以滤除受环境噪声影响严重的采样信号,有效解决信号在非视距传输时引入的不确定时延,提高定位时差的测量精度,从而提高TDOA定位精度。
3 结 语
本文针对信号在空气中非视距传输时,受应用环境中建筑物、树木等障碍物的影响,使得接收信号引入不确定时延的问题,提出对每个时差测量的结果进行可靠度估计,滤除可靠度低的时差测量结果。测试结果表明,此举可以有效避免噪声(接收机内部噪声、外界干扰信号、环境遮挡等)对单次时差测量的影响,提高 TDOA 定位准确度 [9-10]。
审核编辑 :李倩
-
信号源
+关注
关注
5文章
538浏览量
47370 -
无线信号
+关注
关注
2文章
275浏览量
21386 -
滤波算法
+关注
关注
2文章
93浏览量
14227
原文标题:论文速览 | 一种基于可靠度估计的到达时间差滤波方法
文章出处:【微信号:iotmag,微信公众号:iotmag】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
一种基于PWM的电压输出DAC电路设计
一种带通滤波器在无位置传感器转子检测中的应用
基于卡尔曼滤波的无刷电机转矩脉动抑制研究
UWB - TDOA方案定位技术
大模型推理显存和计算量估计方法研究
神经网络RAS在异步电机转速估计中的仿真研究
汉思新材料取得一种封装芯片高可靠底部填充胶及其制备方法的专利

一种永磁电机用转子组件制作方法
共模和差模信号与滤波器
电源滤波器的响应时间是多少?
电源滤波器的差模抑制能力会受哪些因素影响

卡尔曼滤波在信号处理中的应用分析
卡尔曼滤波在机器人导航中的应用
一种降低VIO/VSLAM系统漂移的新方法






 工商网监
工商网监
评论