 博士生构建能控制机器人仿真的NVIDIA Omniverse扩展程序
博士生构建能控制机器人仿真的NVIDIA Omniverse扩展程序

“Omniverse 先锋面对面”系列文章
介绍使用 NVIDIA Omniverse 3D 模拟和协作平台推动艺术创作或设计流程的个人创作者和开发者。
加州大学洛杉矶分校博士生 Yizhou Zhao 凭借用于机器人仿真环境的“IndoorKit”扩展程序赢得“Extend the Omniverse”竞赛。
除专心攻读统计学博士学位、进行人工智能和机器人领域的数据驱动研究以及开展其爱好的帆船运动之外,Yizhou Zhao 还参加了 NVIDIA Omniverse(一个用于连接和构建自定义 3D 管线和元宇宙应用的平台)开发者比赛并获得奖项。
这位加州大学洛杉矶分校的五年级博士生在首届#ExtendOmniverse 竞赛中获得了第一名。开发者通过创建Omniverse 扩展程序来参加该比赛即有机会赢取NVIDIA RTX GPU。
Omniverse 扩展程序是向所有用户开放的、可利用 Python 创建和扩展 Omniverse 应用功能的核心构件。
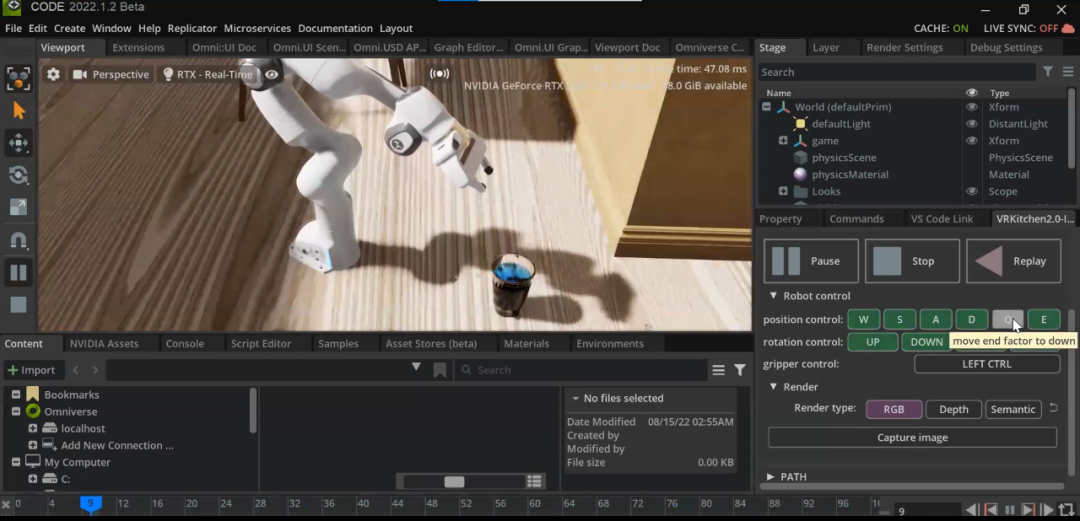
Zhao 的获奖作品名为“IndoorKit”。用户可利用该扩展程序在室内场景中轻松加载和记录机器人仿真任务。用户只需点击几个页面选项,该扩展程序就能利用室内环境、机器人和其他物体来自动填充场景,以设置机器人操作任务。
Zhao 表示:“一般情况下,如果不具备场景构建、布局采样和机器人控制领域的大量技能,很难在仿真环境中部署机器人任务。我构建的扩展程序利用通用场景描述(USD)框架将资产导入强大的 Omniverse 用户界面,可实现即时场景设置以及对机器人的精确控制。”
在“IndoorKit”扩展程序中,用户只需要点击“添加物体”、“添加房屋”、“加载场景”、“记录场景”等按钮,就能操纵环境的各个方面并直接进行机器人仿真。
凭借通用场景描述(USD)这一开源、可扩展的框架,Zhao 借助用于连接 Autodesk Maya 和 Blender 软件的Omniverse 连接器顺利地将 3D 模型导入其构建的虚拟环境中。
“IndoorKit”扩展程序还借助NVIDIA Isaac Sim机器人仿真平台的资产和 Omniverse 内置的PhysX,实现对机器人进行准确、连贯的操纵。
另外,“IndoorKit”还可以随机调整场景中的灯光、房间材质等。以上视频重点介绍了 Zhao 使用该扩展程序构建的一个场景。
Omniverse 在机器人领域的应用
“IndoorKit”扩展程序架起了一座连接 Omniverse 与机器人仿真研究的桥梁。
Zhao 表示:“很难想象在 Omniverse 出现之前,人们是如何实现精准控制机器人的。”此外,Zhao 还提出了四大理由,来说明为什么 Omniverse 是构建该扩展程序的理想平台:
Python 的普及意味着许多开发者可以用它来构建扩展程序,使更多人能够开展机器学习和深度学习领域的研究。
在 Omniverse 平台使用 NVIDIA RTX GPU 可以在很大程度上加速机器人的控制和训练速度。
Omniverse 的光线追踪技术可实现实时、逼真的场景渲染。Zhao 表示,与过去相比,他花在实验设置和仿真上的时间减少了 90%。
Omniverse 平台的实时高级物理模拟引擎 PhysX 支持各种功能,包括液体、颗粒和柔体模拟等。Zhao 表示,“这些都是机器人研究的前沿领域”。
最后,他说道:“艺术、工程和研究的未来趋势是将建模、动画与仿真模拟等一切连接到一起。Omniverse 可以做到这一点。”
审核编辑:汤梓红
-
机器人
+关注
关注
213文章
31442浏览量
223639 -
NVIDIA
+关注
关注
14文章
5687浏览量
110115
原文标题:Omniverse 先锋面对面:博士生构建能控制机器人仿真的 NVIDIA Omniverse 扩展程序
文章出处:【微信号:NVIDIA-Enterprise,微信公众号:NVIDIA英伟达企业解决方案】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
英飞凌携手NVIDIA,依托数字孪生技术加速部署安全可靠的机器人

NVIDIA 携手全球机器人领导者,将物理 AI 带入现实世界

借助NVIDIA Isaac Sim与World Labs Marble加速机器人仿真环境构建
亿纬锂能受邀出席北大国际博士生学术论坛
NVIDIA Isaac Lab推动机器人技术突破
NVIDIA三台计算机解决方案如何协同助力机器人技术
机器人竞技幕后:磁传感器芯片激活 “精准感知力”
NVIDIA Omniverse Extension开发秘籍

NVIDIA通过全新 Omniverse库、Cosmos物理AI模型及AI计算基础设施,为机器人领域开启新篇章

NVIDIA助力构建人形机器人全身遥操作仿真平台
通过NVIDIA Cosmos模型增强机器人学习

NVIDIA 通过云端至机器人计算平台驱动人形机器人技术,赋能物理 AI

盘点#机器人开发平台
洞悉Omniverse:如何实现工业设施数字孪生中的机器人机群仿真
借助NVIDIA技术提升机器人的移动和全身控制能力




评论