 【地平线旭日X3派试用体验】X3派开箱及开发环境搭建
【地平线旭日X3派试用体验】X3派开箱及开发环境搭建

本文来源电子发烧友社区,作者:yjp, 帖子地址:https://bbs.elecfans.com/jishu_2303179_1_1.html
地平线旭日X3派开发板是我见过,AI计算算力最强,开源程度最深,AI算法集成度最高的开发板,再此表示感谢。
环境安装在进行AI算法开发之前请参考X3派用户手册完成系统安装及配置,此时X3派上已默认安装好了地平线Python版本AI推理引擎(hobot_dnn)及其配套依赖环境。hobot_dnn提供了Model、pyDNNTensor、TensorProperties三个类和load接口。您可通过如下方式获取hobot_dnn的基本信息:
-------------------------------------------------------------------------------------------------------------------------------
python3
>>> from hobot_dnn import pyeasy_dnn as dnn
>>> dir(dnn)
['Model', 'TensorProperties', '__doc__', '__file__', '__loader__', '__name__', '__package__', '__spec__', 'load', 'pyDNNTensor']
-------------------------------------------------------------------------------------------------------------------------------
AI推理引擎的更新可参考如下方式(出于系统安全、稳定性的考虑,建议统一通过APT命令更新X3派板级开发包):
-------------------------------------------------------------------------------------------------------------------------------
#更新package列表
sudo apt update
#升级所有已安装的软件包到最新版本
sudo apt full-upgrade
#清除缓存文件(非必须)
sudo apt clean
#重启设备
sudo reboot
-------------------------------------------------------------------------------------------------------------------------------
1 推理接口介绍1.1 ModelAI算法模型类,描述模型的名称,输入、输出数据属性信息,forward 方法用来完成算法的推理。
-------------------------------------------------------------------------------------------------------------------------------
class hobot_dnn.pyeasy_dnn.Model
'''
Parameters:
1、name (string):模型名称
2、inputs (tuple(hobot_dnn.pyeasy_dnn.pyDNNTensor)):模型的输入tensor
3、outputs (tuple(hobot_dnn.pyeasy_dnn.pyDNNTensor)):模型的输出tensor
4、forward (args &args, kwargs &kwargs):模型推理函数接口,输入模型推理所必要的参数,返回模型推理结果
parameters:
input_tensor:输入数据
core_id (int):模型推理的core id,可为0,1,2,默认为0表示任意核推理
priority (int):当前模型推理任务的优先级,范围[0~255],越大优先级越高
'''
-------------------------------------------------------------------------------------------------------------------------------
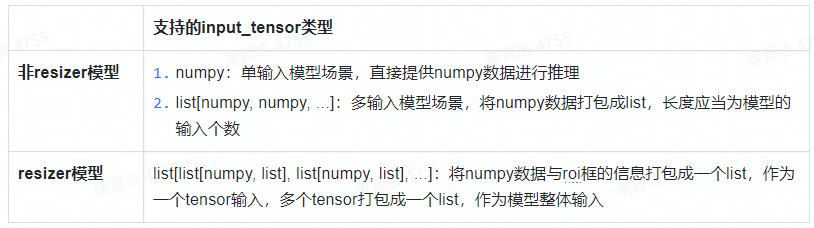
其中,forward方法的input_tensor支持三种格式输入:
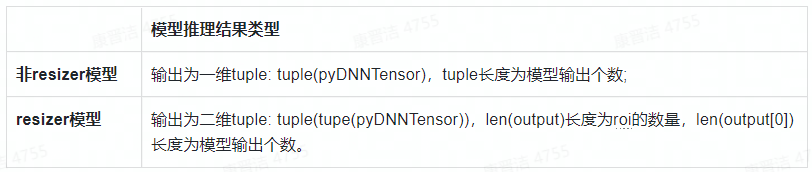
forward方法的返回值为模型推理结果,有如下两种情况:
1.2 pyDNNTensorAI 算法输入、输出 tensor 类
-------------------------------------------------------------------------------------------------------------------------------
class hobot_dnn.pyeasy_dnn.pyDNNTensor
'''
Parameters:
1、properties (TensorProperties):tensor的属性,详细参见本文1.3节
2、buffer (numpy):tensor中的数据,数据访问方式同numpy
3、name (string):tensor的名称
'''
-------------------------------------------------------------------------------------------------------------------------------
1.3 TensorPropertiesAI 算法输入/输出 tensor 的属性类
-------------------------------------------------------------------------------------------------------------------------------
class hobot_dnn.pyeasy_dnn.TensorProperties
'''
Parameters:
1、tensor_type (string):tensor的数据类型,如:NV12、BGR、float32等
2、dtype (string):数据的存储类型,同numpy数据类型,如:int8、uint8、float32等
3、layout (string):数据排布格式,NHWC或者NCHW
4、shape (tuple):数据的shape信息,例如:(1,3,224,224)
'''
-------------------------------------------------------------------------------------------------------------------------------
1.4 loadload接口用于加载模型
-------------------------------------------------------------------------------------------------------------------------------
hobot_dnn.pyeasy_dnn.load(model_file)
'''
接口支持两种模型加载方式:
1、输入模型的文件路径,加载单个模型,或者单个pack模型
model_file = "/userdata/single_model.bin"
models = hobot_dnn.pyeasy_dnn.load(model_file)
2、输入模型的文件列表,加载多个模型
model_file = ["model1.bin", "model2.bin"]
models = hobot_dnn.pyeasy_dnn.load(model_file)
接口返回hobot_dnn.pyeasy_dnn.Model类型的tuple列表
'''
-------------------------------------------------------------------------------------------------------------------------------
2 快速上手示例X3派配套AI推理示例默认安装在/app/ai_inference目录下,包含如下示例:
-------------------------------------------------------------------------------------------------------------------------------
|-- 01_basic_sample # 从本地读取图片并完成mobilenetv1分类模型推理
|-- 02_usb_camera_sample # 从USB camera获取视频数据并完成FCOS检测模型推理
|-- 03_mipi_camera_sample # 从MIPI camera获取视频数据并完成FCOS检测模型推理
|-- 05_web_display_camera_sample # 基于MIPI Camera的FCOS目标检测及web端展示
|-- 06_yolov3_sample # 从本地读取图片并完成Yolov3检测模型推理
|-- 07_yolov5_sample # 从本地读取图片并完成Yolov5检测模型推理
`-- models
-------------------------------------------------------------------------------------------------------------------------------
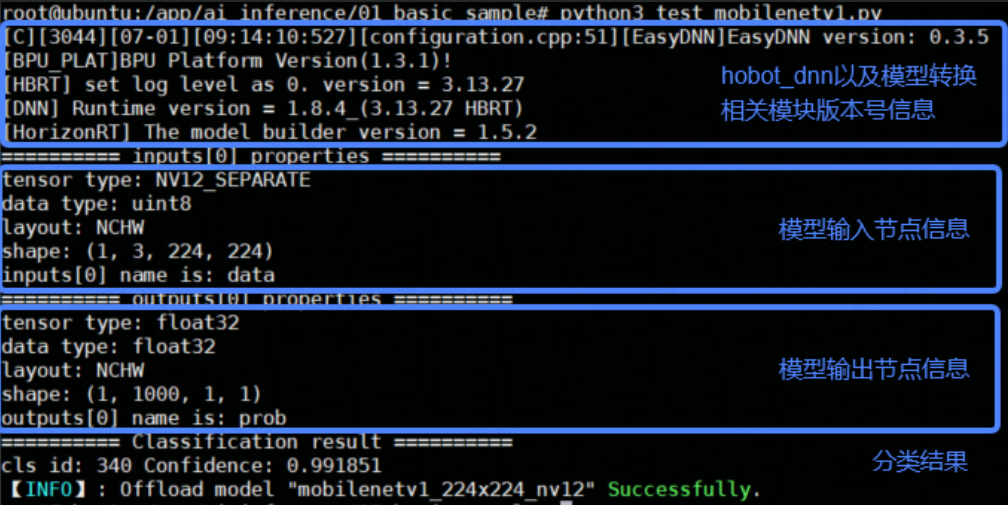
本节将以01_basic_sample为例,为大家展示如何使用hobot_dnn完成模型推理。运行以下示例您需要准备编译好的混合异构模型mobilenetv1_224x224_nv12.bin(存放于/app/ai_inference/models路径下),以及一张图片zebra_cls.jpg(存放于01_basic_sample文件夹下)。
-------------------------------------------------------------------------------------------------------------------------------
from hobot_dnn import pyeasy_dnn as dnn
import numpy as np
import cv2
# 查看模型输入输出节点的信息
def print_properties(pro):
print("tensor type:", pro.tensor_type)
print("data type:", pro.dtype)
print("layout:", pro.layout)
print("shape:", pro.shape)
# 依据模型input_type_rt决定是否需要进行数据格式转换(本实例所用模型为nv12输入)
def bgr2nv12_opencv(image):
height, width = image.shape[0], image.shape[1]
area = height * width
yuv420p = cv2.cvtColor(image, cv2.COLOR_BGR2YUV_I420).reshape((area * 3 // 2,))
y = yuv420p[:area]
uv_planar = yuv420p[area:].reshape((2, area // 4))
uv_packed = uv_planar.transpose((1, 0)).reshape((area // 2,))
nv12 = np.zeros_like(yuv420p)
nv12[:height * width] = y
nv12[height * width:] = uv_packed
return nv12
# 1.加载模型
models = dnn.load('../models/mobilenetv1_224x224_nv12.bin')
# 2.查看模型输入输出节点的信息
for input in models[0].inputs:
print_properties(input.properties)
for output in models[0].outputs:
print_properties(output.properties)
# 3.准备输入数据
# 打开图片
img_file = cv2.imread('./zebra_cls.jpg')
# 把图片缩放到模型的输入尺寸
h, w = models[0].inputs[0].properties.shape[2], models[0].inputs[0].properties.shape[3]
resized_data = cv2.resize(img_file, (w, h), interpolation=cv2.INTER_AREA)
nv12_data = bgr2nv12_opencv(resized_data)
# 4.模型推理
outputs = models[0].forward(nv12_data)
# 5.后处理
np.argmax(outputs[0].buffer)
print("cls id: %d Confidence: %f" % (np.argmax(outputs[0].buffer), outputs[0].buffer[0][np.argmax(outputs[0].buffer)]))
-------------------------------------------------------------------------------------------------------------------------------
地平线旭日X3派开发板是我见过,AI计算算力最强,开源程度最深,AI算法集成度最高的开发板,再此表示感谢。
环境安装在进行AI算法开发之前请参考X3派用户手册完成系统安装及配置,此时X3派上已默认安装好了地平线Python版本AI推理引擎(hobot_dnn)及其配套依赖环境。hobot_dnn提供了Model、pyDNNTensor、TensorProperties三个类和load接口。您可通过如下方式获取hobot_dnn的基本信息:
-------------------------------------------------------------------------------------------------------------------------------
python3
>>> from hobot_dnn import pyeasy_dnn as dnn
>>> dir(dnn)
['Model', 'TensorProperties', '__doc__', '__file__', '__loader__', '__name__', '__package__', '__spec__', 'load', 'pyDNNTensor']
-------------------------------------------------------------------------------------------------------------------------------
AI推理引擎的更新可参考如下方式(出于系统安全、稳定性的考虑,建议统一通过APT命令更新X3派板级开发包):
-------------------------------------------------------------------------------------------------------------------------------
#更新package列表
sudo apt update
#升级所有已安装的软件包到最新版本
sudo apt full-upgrade
#清除缓存文件(非必须)
sudo apt clean
#重启设备
sudo reboot
-------------------------------------------------------------------------------------------------------------------------------
1 推理接口介绍1.1 ModelAI算法模型类,描述模型的名称,输入、输出数据属性信息,forward 方法用来完成算法的推理。
-------------------------------------------------------------------------------------------------------------------------------
class hobot_dnn.pyeasy_dnn.Model
'''
Parameters:
1、name (string):模型名称
2、inputs (tuple(hobot_dnn.pyeasy_dnn.pyDNNTensor)):模型的输入tensor
3、outputs (tuple(hobot_dnn.pyeasy_dnn.pyDNNTensor)):模型的输出tensor
4、forward (args &args, kwargs &kwargs):模型推理函数接口,输入模型推理所必要的参数,返回模型推理结果
parameters:
input_tensor:输入数据
core_id (int):模型推理的core id,可为0,1,2,默认为0表示任意核推理
priority (int):当前模型推理任务的优先级,范围[0~255],越大优先级越高
'''
-------------------------------------------------------------------------------------------------------------------------------
其中,forward方法的input_tensor支持三种格式输入:
forward方法的返回值为模型推理结果,有如下两种情况:
resizer模型指在模型转换时input_source设置为“resizer”编译生成的模型,相关配置方式可参考社区X3 用户手册。resizer模型推理时,hobot_dnn会先使用ROI从输入数据中抠图后resize到模型输入大小再送入模型进行推理。
*目前resizer模式暂只支持单输入的nv12/nv12_bt601模型。
1.2 pyDNNTensorAI 算法输入、输出 tensor 类
-------------------------------------------------------------------------------------------------------------------------------
class hobot_dnn.pyeasy_dnn.pyDNNTensor
'''
Parameters:
1、properties (TensorProperties):tensor的属性,详细参见本文1.3节
2、buffer (numpy):tensor中的数据,数据访问方式同numpy
3、name (string):tensor的名称
'''
-------------------------------------------------------------------------------------------------------------------------------
1.3 TensorPropertiesAI 算法输入/输出 tensor 的属性类
-------------------------------------------------------------------------------------------------------------------------------
class hobot_dnn.pyeasy_dnn.TensorProperties
'''
Parameters:
1、tensor_type (string):tensor的数据类型,如:NV12、BGR、float32等
2、dtype (string):数据的存储类型,同numpy数据类型,如:int8、uint8、float32等
3、layout (string):数据排布格式,NHWC或者NCHW
4、shape (tuple):数据的shape信息,例如:(1,3,224,224)
'''
-------------------------------------------------------------------------------------------------------------------------------
1.4 loadload接口用于加载模型
-------------------------------------------------------------------------------------------------------------------------------
hobot_dnn.pyeasy_dnn.load(model_file)
'''
接口支持两种模型加载方式:
1、输入模型的文件路径,加载单个模型,或者单个pack模型
model_file = "/userdata/single_model.bin"
models = hobot_dnn.pyeasy_dnn.load(model_file)
2、输入模型的文件列表,加载多个模型
model_file = ["model1.bin", "model2.bin"]
models = hobot_dnn.pyeasy_dnn.load(model_file)
接口返回hobot_dnn.pyeasy_dnn.Model类型的tuple列表
'''
-------------------------------------------------------------------------------------------------------------------------------
2 快速上手示例X3派配套AI推理示例默认安装在/app/ai_inference目录下,包含如下示例:
-------------------------------------------------------------------------------------------------------------------------------
|-- 01_basic_sample # 从本地读取图片并完成mobilenetv1分类模型推理
|-- 02_usb_camera_sample # 从USB camera获取视频数据并完成FCOS检测模型推理
|-- 03_mipi_camera_sample # 从MIPI camera获取视频数据并完成FCOS检测模型推理
|-- 05_web_display_camera_sample # 基于MIPI Camera的FCOS目标检测及web端展示
|-- 06_yolov3_sample # 从本地读取图片并完成Yolov3检测模型推理
|-- 07_yolov5_sample # 从本地读取图片并完成Yolov5检测模型推理
`-- models
-------------------------------------------------------------------------------------------------------------------------------
本节将以01_basic_sample为例,为大家展示如何使用hobot_dnn完成模型推理。运行以下示例您需要准备编译好的混合异构模型mobilenetv1_224x224_nv12.bin(存放于/app/ai_inference/models路径下),以及一张图片zebra_cls.jpg(存放于01_basic_sample文件夹下)。
-------------------------------------------------------------------------------------------------------------------------------
from hobot_dnn import pyeasy_dnn as dnn
import numpy as np
import cv2
# 查看模型输入输出节点的信息
def print_properties(pro):
print("tensor type:", pro.tensor_type)
print("data type:", pro.dtype)
print("layout:", pro.layout)
print("shape:", pro.shape)
# 依据模型input_type_rt决定是否需要进行数据格式转换(本实例所用模型为nv12输入)
def bgr2nv12_opencv(image):
height, width = image.shape[0], image.shape[1]
area = height * width
yuv420p = cv2.cvtColor(image, cv2.COLOR_BGR2YUV_I420).reshape((area * 3 // 2,))
y = yuv420p[:area]
uv_planar = yuv420p[area:].reshape((2, area // 4))
uv_packed = uv_planar.transpose((1, 0)).reshape((area // 2,))
nv12 = np.zeros_like(yuv420p)
nv12[:height * width] = y
nv12[height * width:] = uv_packed
return nv12
# 1.加载模型
models = dnn.load('../models/mobilenetv1_224x224_nv12.bin')
# 2.查看模型输入输出节点的信息
for input in models[0].inputs:
print_properties(input.properties)
for output in models[0].outputs:
print_properties(output.properties)
# 3.准备输入数据
# 打开图片
img_file = cv2.imread('./zebra_cls.jpg')
# 把图片缩放到模型的输入尺寸
h, w = models[0].inputs[0].properties.shape[2], models[0].inputs[0].properties.shape[3]
resized_data = cv2.resize(img_file, (w, h), interpolation=cv2.INTER_AREA)
nv12_data = bgr2nv12_opencv(resized_data)
# 4.模型推理
outputs = models[0].forward(nv12_data)
# 5.后处理
np.argmax(outputs[0].buffer)
print("cls id: %d Confidence: %f" % (np.argmax(outputs[0].buffer), outputs[0].buffer[0][np.argmax(outputs[0].buffer)]))
-------------------------------------------------------------------------------------------------------------------------------
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
开发板试用
+关注
关注
3文章
303浏览量
2786
发布评论请先 登录
相关推荐
热点推荐
半年参与3万辆宝马X3生产,人形机器人“进厂打工”真成了
了其人形机器人“进厂打工”的最新成果。 Figure 02:半年参与3万辆宝马X3生产,进入退役阶段 根据Figure AI的说法,在过去的六个月内,其第二代人形机器人Figure 02已经在宝马集团斯帕坦堡工厂参与生产了3

博泰车联网与地平线达成战略合作
4月22日,博泰车联(股票代码:2889.HK)在北京地平线机器人技术研发有限公司(以下简称“地平线”)的国内首款舱驾融合整车智能体芯片地平线星空(Horizon Starry)的产品发布会现场与

FT 5000 Smart Transceiver与FT - X3 Communications Transformer:智能网络新选择
FT 5000 Smart Transceiver与FT - X3 Communications Transformer:智能网络新选择 在智能网络的发展进程中,设备的性能、成本和兼容性是工程师们
地平线11篇论文强势入选CVPR 2026
论文收录结果。地平线凭借深厚的技术积淀与前瞻的科研布局,共有11篇论文成功入选,覆盖端到端自动驾驶、3D重建、世界模型、具身智能等多个核心领域,充分彰显地平线在前沿技术领域的顶尖研发水平。

直播预告 | 睿擎派3506 Ubuntu开发实战:从环境搭建到整包固件制作,一次讲透
想用Ubuntu系统在睿擎派3506上做开发,却卡在环境配置?开发完应用程序,如何打包成完整的固件方便部署?SSH连不上、网络配不好、固件烧了起不来——这些坑你都踩过几个?

华为路由 X3 Pro火了!业界首发Wi-Fi7+和透明天线,1299元起
电子发烧友原创 章鹰 11月25日,在华为 Mate 80 系列 / Mate X7 及全场景新品发布会上,华为消费者BG CEO何刚宣布,首款艺术路由——华为路由 X3 Pro日照金山发布。这款

地平线HSD量产先锋品鉴会圆满落幕
2025年11月19日-24日,地平线在广州举办Drive on Horizon·HSD量产先锋品鉴会。首搭地平线HSD及征程6P的星途ET5、搭载征程6的深蓝L06开启辅助驾驶体验,以出色的实际
地平线助力博世中阶智能辅助驾驶方案量产交付
2025年4月,地平线与博世深化战略合作,双方基于征程6系列加速智能辅助驾驶方案的研发与应用。近日,搭载征程6M的博世中阶智能辅助驾驶方案的全新量产合作车型东风奕派eπ007+、北京越野BJ40增程元境智行版先后上市,标志着地平线
安谋发布“周易”X3 NPU,破局AI算力,智绘未来蓝图
2025年11月13日,国内领先的芯片IP设计与服务提供商安谋科技Arm China,正式揭开了新一代NPU IP“周易”X3的神秘面纱。通过其创新的专为大模型设计的DSP+DSA混合架构与软硬协同
地平线与Unity中国达成战略合作
近日,中国智驾科技领军企业地平线与全球领先的实时3D内容创作和运营平台Unity正式签署战略合作协议。双方将深度融合地平线HSD (Horizon SuperDrive) 人机交互系统与Unity
奇瑞风云X3系列双车上市
8月16日,奇瑞汽车旗下风云品牌全新方盒子产品序列——风云X3与风云X3 PLUS正式宣告上市。风云X3系列基于iCAR 03系列焕新升级而来,在造型设计、动力性能、智能科技、功能配置及工艺品质等维度实现全方位跃升。
【BPI-CanMV-K230D-Zero开发板体验】香蕉派 K230D 视觉开发板开箱+CamMV 环境搭建
【开箱】
今天收到了香蕉派 Banana Pi BPI-CanMV-K230D-Zero 开发板,先上图一睹为快。
【处理器介绍】
这款开发板搭载嘉楠科技 K230D 处理器,K
发表于 06-24 22:54
韵乐Vinal X3/X5卡拉OK音频处理器调音软件简介
韵乐Vinal X3/X5卡拉OK音频处理器调音软件软件简介韵乐Vinal X3/X5调音软件具有音箱处理器功能的卡拉ok效果器每个功能部分都独立可调且有相应的PC界面可直观调节易于操
发表于 05-16 15:33
•4次下载
RDK X3 带飞的智能护理系统:让机器人秒变贴心小棉袄
济往开来团队带着超燃黑科技来了!基于 RDK X3 开发的老年智能监控系统,跌倒秒报警、手势一键呼叫、还能陪唠嗑!最绝的是 开源代码直接甩链接 ,技术党狂喜!




评论