 ROS完成ROS和ROS2中各个组件向openEuler的适配
ROS完成ROS和ROS2中各个组件向openEuler的适配

ROS,即 Robot Operating System,是机器人领域主流的开源平台,提供类似于操作系统的服务,包括硬件抽象描述、底层驱动程序管理、共用功能的执行、程序间消息传递、程序发行包管理等功能。ROS 还提供一些工具和库用于获取、建立、编写和执行多机融合的程序,为机器人产学研究提供了便利的开发环境。
项目简介
2020 年 6 月,由中国科学院软件所智能软件中心的机器人团队为核心创立的 openEuler ROS SIG 正式成立。ROS SIG 旨在完善 openEuler 操作系统对机器人分布式通信的底层支持,并且将 ROS 生态逐步扩展到 openEuler 上。同时,ROS SIG 致力于保证 ROS 机器人和最新版本的 ROS 软件包,以及基于 ROS 开发的第三方软件包相关软件可以顺利适配并兼容 openEuler 操作系统,从而使得社区贡献者和用户可以直接从 openEuler 中直接获取最新的 ROS 包进行安装和使用。当前,ROS SIG 组的基础目标如下:
在 openEuler 社区中添加并完善对 ROS 和 ROS2 的支持
跟随 openEuler 迭代版本,持续完成 ROS 和 ROS2 中各个组件向 openEuler 的适配,并提供相关使用文档
积极提供后续技术维护,及时响应用户反馈
项目进展
目前,ROS SIG 各方面取得了阶段性的进展,完成了适配 ROS 包的安装、功能测试、仿真和真机运行等。
软件层面
ROS-SIG 跟随 openEuler 的 20.03、21.03、22.03 版本,分别适配移植了 ROS-kinetic、ROS-melodic、ROS-noetic、ROS2-foxy 四个版本的基础功能包,以及部分桌面扩展包、第三方工具包等等。其中,在 openEuler 的 21.03 版本上成功编译运行 ROS melodic 桌面版,22.03 版本上成功编译运行 ROS melodic 桌面版和 ROS2 foxy 基础版。
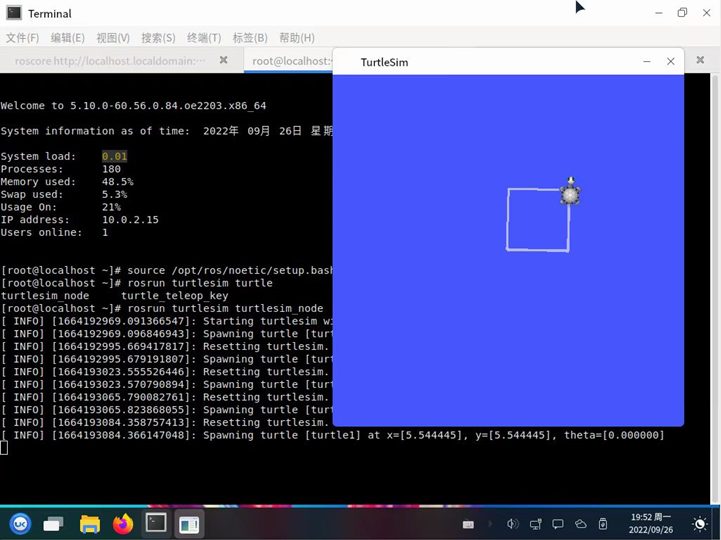
在仿真模拟软件方面,SIG 组率先进行了二维仿真软件 stage 的移植适配和更新迭代。stage 作为一款轻量化的可视化模拟软件,在嵌入式桌面版本调试开发十分高效。而后 SIG 组又移植适配了 gazebo 三维模拟软件,可以更真实的模拟复杂的机器人空间环境,为桌面版的 ROS 软件生态,添加更有力的支持。
硬件层面
ROS-SIG 成功将 ROS 真机运行在了 ARM 和 x86 两种架构上的 openEuler 操作系统上,在树莓派、RK3399、TX2 等开发板上安装测试通过。
在机器人上安装 openEuler 和 ROS 成功运行 SLAM 和导航等功能包,在机械臂上安装 openEuler 和 ROS 成功运行识别抓取等软件包。
已适配的 ROS 软件包列表:https://gitee.com/openeuler/community/tree/master/sig/sig-ROS
产学联动
ROS SIG 致力于机器人方向的产学联动,为中国机器人产业长远发展提供源源不断的原动力。
开源之夏
2022 年,在由中国科学院软件研究所与 openEuler 社区共同主办的开源软件供应链点亮计划系列暑期活动——开源之夏(OSPP)中,ROS SIG 从当前 ROS 生态中比较受欢迎的常用软件中,挑选了三个基于 ROS 开发的第三方软件相关的项目任务。
ROS SIG 基于"ROS 与人工智能"的大主题,精心将三个任务分属为区别较大的三个模块,分别是应用广泛的 ROS2 和激光导航的算法、扩展探索性质 ROS2 和深度学习的目标检测的算法以及在 AI 领域的关键模块 VIO 算法,为学生们提供具有深度探索性和学习性开源机器人项目编程实践。SIG 组成员持续跟进开源之夏项目进展,并且为学生提供线上直播答疑,邮件答疑等辅导工作。
科普展示
在中科院软件所 2022 年公众科学日中,ROS SIG 为智能软件研究中心的智能机器人展示项目提供了技术支持。
SIG 组成员利用互动实验、多媒体演示和真人讲解,向公众展示和介绍了多种机器人和常见传感器(激光雷达、景深摄像头、超声雷达等),以及机器学习如何帮助机器人认知人脸和手势,机器人 SLAM 建图和导航技术和智能机器人对日常生活的贡献。
同时,ROS SIG 和 RISC-V SIG 联动, 利用 RISC-V 开发板介绍智能机器人的大脑。全方位展示了 openEuler 操作系统和 ROS 对智能机器人的贡献。
ROS SIG 目前累计发表多篇总结性文档、博客和多个公开展示视频。
-
机器人
+关注
关注
214文章
31691浏览量
224633 -
ROS
+关注
关注
1文章
298浏览量
18932 -
openEuler
+关注
关注
2文章
345浏览量
6788
原文标题:openEuler ROS SIG 工作进展及规划路线:持续繁荣 ROS 机器人产学研生态
文章出处:【微信号:openEulercommunity,微信公众号:openEuler】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
Micro-ROS:把ROS2放在MCU上
系统镜像Ubuntu_ROS2中ROS2是什么意思,带有ROS2开发环境吗?
如何在ROS2中运行小乌龟呢
【昉·星光 2 高性能RISC-V单板计算机体验】四:在 VisionFive2 上安装 ROS2 humble
【昉·星光 2 高性能RISC-V单板计算机体验】五:在 VisionFive2 上体验 ROS2 humble
Linux嵌入式开发笔记(六)在ROS2中运行小乌龟实例

如何初始化ROS并创立链接
DDS在ROS2中的应用

ros1和ros2的通信模型

ROS2中自带例程测试

在TogetherROS中如何安装ROS2功能包




评论