 ZYNQ多核处理器硬件上的划分
ZYNQ多核处理器硬件上的划分

1.简介
zynq系列开发板有两个板载Cortex-A9处理器,两个ARM可以协同处理数据。
多核处理器硬件上的划分
1.同构多核:系统中的多个处理器在结构上是相同的;
优点是硬件和软件设计上较为简单,通用性高。
2.异构多核:系统中的处理器结构上是不同的;
优点是在某些特定场合,专用的硬件加速核可以提高性能。
ZYNQ中的两个Cortex-A9处理器+可编程逻辑器件FPGA组成了异构多核处理器。
多核处理器从软件运行方式上划分
AMP(Asymmetric Muti-processing):非对称多处理
多个内核相对独立的运行不同的任务,每个内核相互隔离,可以运行不同的操 作系统或者裸机程序。
SMP(Symmetric Muti-processing):
多个处理器运行一个操作系统,这个操作系统同等的管理多个内核。
BMP(Bound Muti-processing):混合多模式
BMP与SMP类似,但是开发者可以指定将某个任务仅在某个指定内核上执行。
AMP模式下要注意不要两个CPU一起访问同一个地址或者共享外设。
2.CPU之间通讯原理
2.1 通讯步骤
1.系统初始化
2.启动CPU1
3.和CPU1进行通讯
4.共享CPU外设
2.2 CPU资源
CPU资源分为私有资源和公共资源。私有资源是每个CPU都有的资源,只能被各自的CPU访问,访问时无需注意冲突。公共资源为CPU之间共享的资源,访问时要注意访问冲突。
私有资源: L1Cache、PPI(Private peripheral interrupts)、MMU(Memory management unit)。
公共资源: L2Cache、DDR存储器、OCM(on chip memory)、ICD(Interrupt control distributor)、全局时钟和其他外等。
OCM用来和CPU之间的通讯的,与DDR相比,OCM具有更高的性能和更低的延迟。用于小数据量(256KB一下)用OCM更好。
避免同时访问的方法
DDR:CPU0只能访问0x00100000至0x001FFFFF,CPU1只能访问0x00200000到0x002FFFFF(可人为更改)
L2Cache:CPU0使用,CPU1不使用。
ICD:中断来自PL,连接到CPU1。
Timer(定时器):只有CPU1使用。
OCM:OCM的某一地址进行标志。当标志为0时这个地址是某个CPU私有的;为1时,这个地址是另一个CPU私有的。或者软件产生中断的方式。
2.3 软件设计
软件设计分为三个阶段
1.First stage boot loader(FSBL):第一启动阶段
2.Bare-metal application for CPU0:裸机应用程序
3.Bare-metal application for CPU1:裸机应用程序
FSBL
一直运行在CPU上面,是开发板上电之后启动先启动Boot rom,后启动FSBL,负责配置PL然后拷贝两个处理器的应用程序(ELF)加载到DDR中,然后开始运行第一个应用程序。
Bare-metal application Code
两个CPU运行各自的裸机的程序,CPU负责初始化共享外设,并且负责启动CPU1.
CPU0 Application
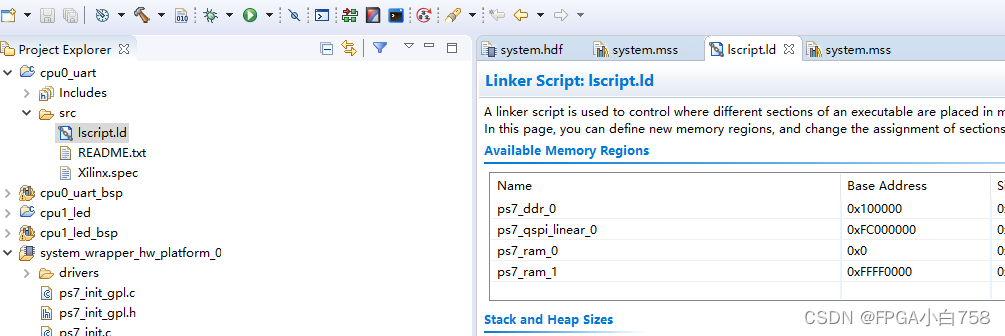
内存的起始地址为0x00100000。这个起始地址可以在链接脚本进行修改的。
CPU0的配置步骤:
1.配置MMU来禁止cache缓存功能0xFFFF0000至0xFFFFFFFF来保证两个CPU访问OCM的一致性。地址映射不可修改。
2.初始化ICD
3.启动CPU1
4.通过串口打印信息
5.设置OCM的地址作为信号量
6.等待地址里面的信号量被清除。
Boot rom代码执行后,CPU1也会在OCM的0xFFFFFF00地址上执行一段代码。功能是检查地址0xFFFFFFF0的值是否为1来等待事件到来。
CPU0启动CPU1是通过向地址0x00200000写入地址0xFFFFFFF0然后CPU0运行Set Event(SEV)命令启动CPU1。CPU1会读取0xFFFFFFF0里面的值0x00200000。然后跳转到该地址执行程序。
CPU1的配置步骤
3 如何避免多个CPU同时访问OCM
CPU0向OCM写入一个数据之后,给CPU1产生软件中断。让CPU1知道CPU0已经不再操作该地址。此时CPU1读取数据,读取完毕后产生一个中断通知CPU0。
软件中断(SGIs):中断来自CPU内部,每个CPU可以中断自己或者另外的CPU或者一起中断,每个CPU有16个中断号,编号为0到15。向寄存器(ICDSGIR)写入中断号并且指定CPU。目标的CPU即可产生中断。
OCM:PS的片上存储器,包括256KB的RAM和128KB的ROM(BootROM)。地址范围为0x00000000到0002FFFF的三个64KB加上0xFFFF_0000到0xFFFF_FFFF共256KB。
4 程序设计
4.1 程序任务
CPU0接收串口数据并写入OCM中,然后利用软件中断触发CPU1;CPU1接收到中断后,根据从OCM中读出的数据控制呼吸灯的频率,并在控制结束后触发CPU0的中断,实现双核CPU通信的功能。
4.2 系统框图

4.3 软件操作
4.4 代码
4.4.1 CPU0_UART
//****************************************Copyright (c)***********************************////原子哥在线教学平台:www.yuanzige.com//技术支持:www.openedv.com//淘宝店铺:http://openedv.taobao.com//关注微信公众平台微信号:"正点原子",免费获取ZYNQ & FPGA & STM32 & LINUX资料。//版权所有,盗版必究。//Copyright(C) 正点原子 2018-2028//All rights reserved//----------------------------------------------------------------------------------------// File name: cpu0_uart// Last modified Date: 2019/6/8 1736// Last Version: V1.0// Descriptions: CPU0应用程序//----------------------------------------------------------------------------------------// Created by: 正点原子// Created date: 2019/6/8 1736// Version: V1.0// Descriptions: The original version////----------------------------------------------------------------------------------------//****************************************************************************************// #include "xparameters.h"#include "xscugic.h"#include "xil_printf.h"#include "xil_exception.h"#include "xil_mmu.h"#include "stdio.h" //宏定义#define INTC_DEVICE_ID XPAR_SCUGIC_SINGLE_DEVICE_ID //中断ID#define SHARE_BASE 0xffff0000 //共享OCM首地址#define CPU1_COPY_ADDR 0xfffffff0 //存放CPU1应用起始地址的地址#define CPU1_START_ADDR 0x10000000 //CPU1应用起始地址 #define CPU1_ID XSCUGIC_SPI_CPU1_MASK //CPU1 ID#define SOFT_INTR_ID_TO_CPU0 0 //软件中断号 0 ,范围:0~15#define SOFT_INTR_ID_TO_CPU1 1 //软件中断号 1 ,范围:0~15 //"SEV"指令唤醒CPU1并跳转至相应的程序#define sev() __asm__("sev") //C语言内嵌汇编写法 send event指令 //函数声明void start_cpu1();void cpu0_intr_init(XScuGic *intc_ptr);void soft_intr_handler(void *CallbackRef); //全局变量XScuGic Intc; //中断控制器驱动程序实例int rec_freq_flag = 0; //接收到呼吸灯频率设置的标志int freq_gear; //频率档位 //CPU0 main函数int main(){ //S=b1 TEX=b100 AP=b11, Domain=b1111, C=b0, B=b0 Xil_SetTlbAttributes(SHARE_BASE,0x14de2); //禁用OCM的Cache属性 //S=b1 TEX=b100 AP=b11, Domain=b1111, C=b0, B=b0 Xil_SetTlbAttributes(CPU1_COPY_ADDR,0x14de2);//禁用0xfffffff0的Cache属性 //启动CPU1 start_cpu1(); //CPU0中断初始化 cpu0_intr_init(&Intc); while(1){ if(rec_freq_flag == 0){ xil_printf("This is CPU0,Please input the numbers 1~5 to change " "breath led frequency "); scanf("%d",&freq_gear); if(freq_gear >= 1 && freq_gear <=5){ xil_printf("You input number is %d ",freq_gear); //向共享的地址中写入输入的数据 Xil_Out8(SHARE_BASE,freq_gear); //给CPU1触发中断 XScuGic_SoftwareIntr(&Intc,SOFT_INTR_ID_TO_CPU1,CPU1_ID); rec_freq_flag = 1; } else{ xil_printf("Error,The number range is 1~5 "); xil_printf(" "); } } } return 0 ;} //启动CPU1,用于固化程序void start_cpu1(){ //向 CPU1_COPY_ADDR(0Xffffffff0)地址写入 CPU1 的访问内存基地址 Xil_Out32(CPU1_COPY_ADDR, CPU1_START_ADDR); dmb(); //等待内存写入完成(同步) sev(); //通过"SEV"指令唤醒CPU1并跳转至相应的程序} //CPU0中断初始化void cpu0_intr_init(XScuGic *intc_ptr){ //初始化中断控制器 XScuGic_Config *intc_cfg_ptr; intc_cfg_ptr = XScuGic_LookupConfig(INTC_DEVICE_ID); XScuGic_CfgInitialize(intc_ptr, intc_cfg_ptr, intc_cfg_ptr->CpuBaseAddress); //设置并打开中断异常处理功能 Xil_ExceptionRegisterHandler(XIL_EXCEPTION_ID_INT, (Xil_ExceptionHandler)XScuGic_InterruptHandler, intc_ptr); Xil_ExceptionEnable(); XScuGic_Connect(intc_ptr, SOFT_INTR_ID_TO_CPU0, (Xil_ExceptionHandler)soft_intr_handler, (void *)intc_ptr); XScuGic_Enable(intc_ptr, SOFT_INTR_ID_TO_CPU0); //CPU0软件中断} //软件中断函数void soft_intr_handler(void *CallbackRef){ xil_printf("This is CPU0,Soft Interrupt from CPU1 "); xil_printf(" "); rec_freq_flag = 0;}
4.4.2 CPU1_LED
//****************************************Copyright (c)***********************************////原子哥在线教学平台:www.yuanzige.com//技术支持:www.openedv.com//淘宝店铺:http://openedv.taobao.com//关注微信公众平台微信号:"正点原子",免费获取ZYNQ & FPGA & STM32 & LINUX资料。//版权所有,盗版必究。//Copyright(C) 正点原子 2018-2028//All rights reserved//----------------------------------------------------------------------------------------// File name: cpu1_led// Last modified Date: 2019/6/8 1736// Last Version: V1.0// Descriptions: CPU1应用程序//----------------------------------------------------------------------------------------// Created by: 正点原子// Created date: 2019/6/8 1736// Version: V1.0// Descriptions: The original version////----------------------------------------------------------------------------------------//****************************************************************************************//
#include "xparameters.h"#include "xscugic.h"#include "xil_printf.h"#include "xil_exception.h"#include "xil_mmu.h"#include "stdio.h"#include "breath_led_ip.h"
//宏定义#define INTC_DEVICE_ID XPAR_SCUGIC_SINGLE_DEVICE_ID //中断ID#define SHARE_BASE 0xffff0000 //共享OCM首地址
#define CPU0_ID XSCUGIC_SPI_CPU0_MASK //CPU0 ID#define SOFT_INTR_ID_TO_CPU0 0 //软件中断号 0 ,范围:0~15#define SOFT_INTR_ID_TO_CPU1 1 //软件中断号 1 ,范围:0~15
#define LED_IP_BASEADDR XPAR_BREATH_LED_IP_0_S0_AXI_BASEADDR //LED IP基地址#define LED_IP_REG0 BREATH_LED_IP_S0_AXI_SLV_REG0_OFFSET //LED IP寄存器地址0#define LED_IP_REG1 BREATH_LED_IP_S0_AXI_SLV_REG1_OFFSET //LED IP寄存器地址1
//函数声明void cpu1_intr_init(XScuGic *intc_ptr);void soft_intr_handler(void *CallbackRef);
//全局变量XScuGic Intc; //中断控制器驱动程序实例int soft_intr_flag = 0; //软件中断的标志int freq_gear; //频率档位
//CPU1 main函数int main(){ int freq_step = 0; //S=b1 TEX=b100 AP=b11, Domain=b1111, C=b0, B=b0 Xil_SetTlbAttributes(SHARE_BASE,0x14de2); //禁用OCM的Cache属性
//CPU1中断初始化 cpu1_intr_init(&Intc); //打开呼吸灯 BREATH_LED_IP_mWriteReg(LED_IP_BASEADDR, LED_IP_REG0, 1); while(1){ if(soft_intr_flag){ freq_gear = Xil_In8(SHARE_BASE); //从共享OCM中读出数据 xil_printf("CUP1 Received data is %d
",freq_gear) ; switch(freq_gear){ case 1 : freq_step = 20;break; case 2 : freq_step = 50;break; case 3 : freq_step = 100;break; case 4 : freq_step = 200;break; case 5 : freq_step = 500;break; default : freq_step = 50;break; } //设置呼吸灯频率,最高位为1,设置有效 BREATH_LED_IP_mWriteReg(LED_IP_BASEADDR,LED_IP_REG1,(0x80000000|freq_step)); //给给CPU0触发中断 XScuGic_SoftwareIntr(&Intc,SOFT_INTR_ID_TO_CPU0,CPU0_ID); soft_intr_flag = 0; } } return 0 ;}
//CPU1中断初始化void cpu1_intr_init(XScuGic *intc_ptr){ //初始化中断控制器 XScuGic_Config *intc_cfg_ptr; intc_cfg_ptr = XScuGic_LookupConfig(INTC_DEVICE_ID); XScuGic_CfgInitialize(intc_ptr, intc_cfg_ptr, intc_cfg_ptr->CpuBaseAddress); //设置并打开中断异常处理功能 Xil_ExceptionRegisterHandler(XIL_EXCEPTION_ID_INT, (Xil_ExceptionHandler)XScuGic_InterruptHandler, intc_ptr); Xil_ExceptionEnable();
XScuGic_Connect(intc_ptr, SOFT_INTR_ID_TO_CPU1, (Xil_ExceptionHandler)soft_intr_handler, (void *)intc_ptr);
XScuGic_Enable(intc_ptr, SOFT_INTR_ID_TO_CPU1); //CPU1软件中断}
//软件中断函数void soft_intr_handler(void *CallbackRef){ xil_printf("This is CUP1,Soft Interrupt from CPU0
") ; soft_intr_flag = 1;}
-
处理器
+关注
关注
68文章
20332浏览量
255012 -
硬件
+关注
关注
12文章
3633浏览量
69172 -
Zynq
+关注
关注
10文章
633浏览量
49574
原文标题:ZYNQ之双核通讯原理以及程序设计
文章出处:【微信号:ZYNQ,微信公众号:ZYNQ】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
嵌入式多核处理器硬件结构分析与对排序算法进行并行化优化
多核处理器设计九大要素
典型的支持多核处理器的RTOS功能解析
集成电路多核处理器虚拟化技术

多核处理器片上存储系统研究

多核处理器会取代FPGA吗?



评论