 Multi WiiCopterh固件参数
Multi WiiCopterh固件参数

这里就写一下MW Wiki里面我觉得不错的东西。
如果你在户外玩,你的 flyng rc 模型必须是抗风的。
1.越重越好——动量和惯性越大
2.越小越好 -暴露在风中的表面越少
此外,具有更快(更高 Kv)电机的小型道具将比更大的道具更抗风。
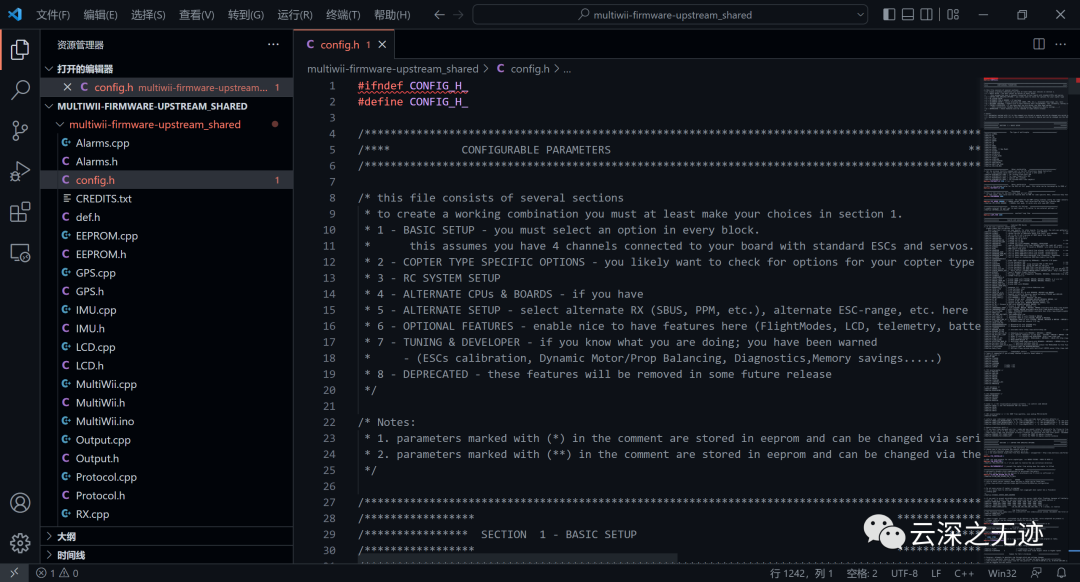
这个是我们要看的代码,很少的代码
MultiWii 的第一个配置是在固件源的config.h文件中完成的。使用 Arduino 等编程 IDE 或简单的文本编辑器,可以更改多旋翼飞行器、飞翼或直升机的多个选项。
这是通过添加或删除#define参数前面的//来完成的,该参数注释或取消注释该行,以便它包含或不包含在最终固件中。
例如,在配置文件中选择多旋翼的类型、电机的最小油门、i2c 速度、内部上拉电阻(如果需要)、至少带有陀螺仪的控制器板,删除#define前面的//就可以了在ACRO模式下飞行的最简单配置。无需更改任何其他行:
#define QUADX#define MINTHROTTLE 1180#define I2C_SPEED 400000L#define CRIUS_SE
下一步是使用 Arduino IDE 或其他方式(如 ISP 编程器)将固件上传到控制器板.
飞控内存使用:
需要注意的是,可以在 config.h 中启用许多选项,这些选项会影响编译代码的最终大小以及运行时使用的 RAM。当使用基于 ATmega 328p 的 multiwii 飞行控制器时,在 config.h 中选择要启用的内容时应特别小心,以免超出可用程序内存或 RAM。目前 Arduino IDE 将无法编译超过程序内存大小的固件,但它只会警告可能的低 RAM。
这样就是开启了
http://www.multiwii.com/wiki/index.php?title=Config.h
这个是对宏定义的一个简单的说明。

这里只能选择一个飞机的类型
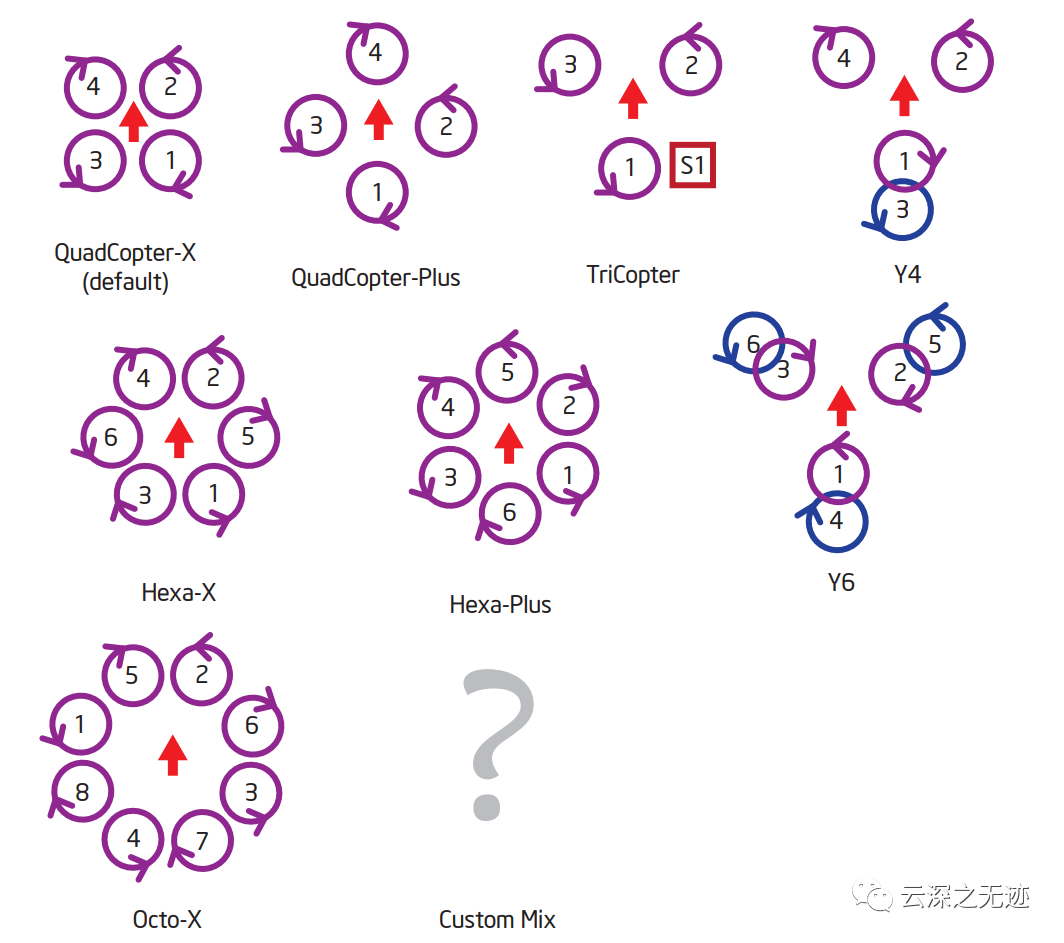
可以在这里看到不同的气动布局
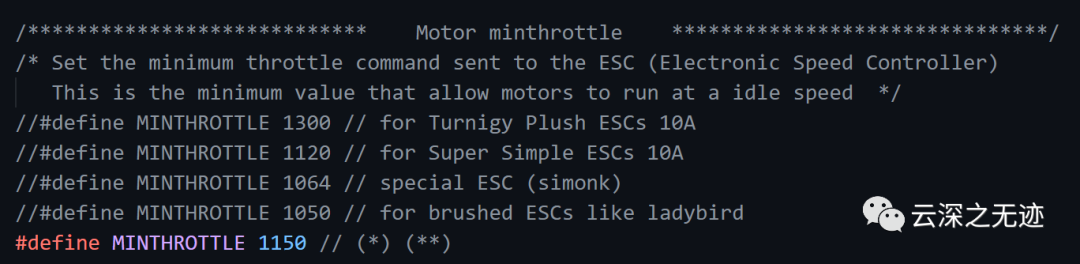
电机的最小油门
这是在启动电机时选择的最低油门速度。你必须根据你的 ESC(速度控制器)和电机配置该值。此设置将防止电机在飞行中停止并发生碰撞。测试该值是否正常,电机在没有螺旋桨的情况下运行并移动飞机以查看在改变速度时是否有任何电机停止。
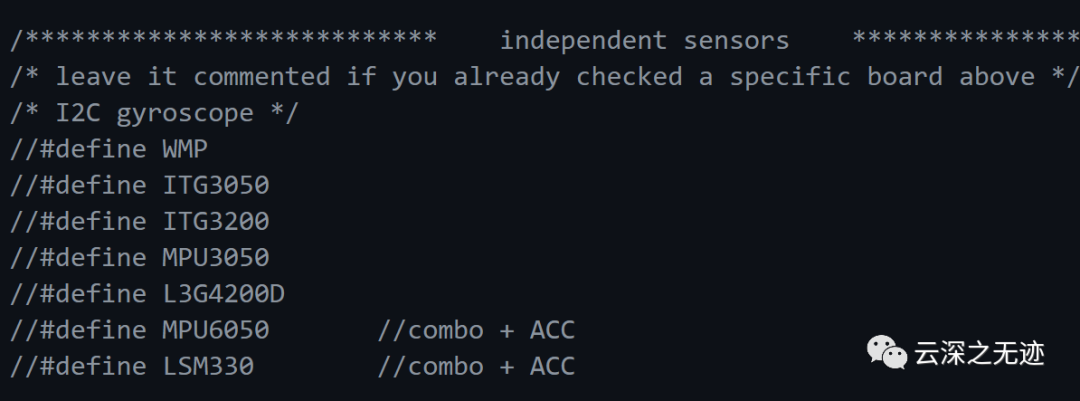
独立传感器
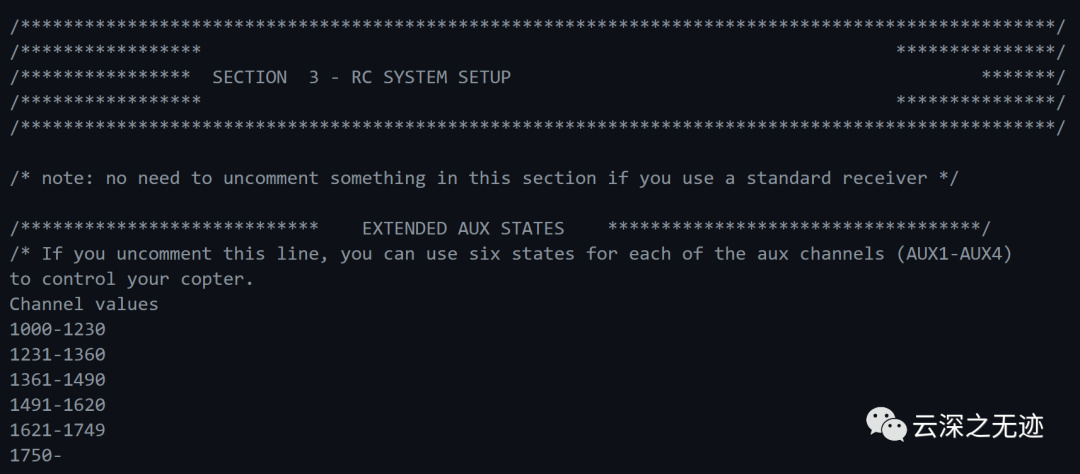
RC控制,你这里看,就找到BF用的人多了,都是按钮,一点就好,这里得看半天。
MultiWii 使用闭环控制器来确保其稳定性和可操作性。与大多数多旋翼一样,它使用比例积分微分 (PID) 控制器。
当 MultiRotor 方向在任何俯仰/滚动/偏航轴上发生变化时,陀螺仪会指示其初始位置的角度变化。MultiRotor 控制器尝试纠正控制器输出测量值(由陀螺仪测量)和输入设定点(摇杆位置)之间计算的误差,并驱动电机尝试将 MultiRotor 返回到其初始位置。
这种测量的角度偏差和随时间变化的采样的组合为控制器提供了足够的信息来驱动电机仅使用陀螺仪返回平衡:这是默认的Acro 模式。
使用陀螺仪,飞行控制器将使用角速度来保持当前姿态。对可达到的态度没有限制。所有其他飞行模式均基于此模式。在使用其他飞行模式之前,需要在特技模式下实现稳定的行为。
找到飞机的重心,把电池移动到这里,接着,把RC杆打一半,电机功率的50%。
P 是 PID 的主要部分,可以让你了解良好的飞行特性。
1.将 PID 设置为其默认值
2.将 MultiRotor 牢牢固定在空中
3.将油门增加到开始感觉轻的悬停点
4.尝试将 MultiRotor 向下倾斜到每个电机轴上
5.应该感觉到对每个轴的压力的反应。
6.改变 P 直到难以对抗反应。
7。现在尝试沿 Pitch 轴(从前到后)摇动 MultiRotor。增加 P 直到它开始振荡,然后减少触摸。对偏航轴重复。现在应该适合飞行。
高级调优 - 了解 P、I 和 D 的影响:
P : 这是用于将 MultiRotor 返回到其初始位置的校正力的大小。
力的大小与初始位置的偏差减去控制器输入的任何改变方向的命令的组合成正比。较高的 P 值将产生更强的力来抵抗任何改变其位置的尝试。如果 P 值过高,在返回初始位置时,会出现过冲,需要反作用力进行补偿。这会产生振荡效应,直到最终达到稳定性或在严重的情况下变得完全不稳定。
增加 P 的值:
它会变得更加稳固/稳定,直到 P 太高,它开始振荡并失去控制。
你会注意到对移动 MultiRotor 的任何尝试都有很强的抵抗力。
P 的递减值:
它会在控制中开始漂移,直到 P 变得非常不稳定时太低。
对任何改变方向的尝试的抵抗力都会降低。
特技飞行:需要稍高的P值
轻柔平稳的飞行:需要稍低的P值
I :这是对角度变化进行采样和平均的时间段
施加到返回初始位置的力的量增加了 I 因子,偏差存在的时间越长,直到达到最大力值。更高的 I 将增加角度保持能力。
为 I 增加值:
增加保持整体初始位置的能力并减少漂移,但也会增加返回初始位置的延迟。
也会降低P的重要性。
I 的递减值:
会改善对变化的反应,但会增加漂移并降低保持姿势的能力。
也会增加P的重要性。
特技飞行:需要稍低的 I
平缓平稳飞行:需要稍高的 I
D:这是 MultiRotor 返回到其原始位置的速度。
增加 D 的值:提高恢复偏差的速度
快速恢复速度带来更高的过冲和振荡概率
也会增加P的效果
D 的递减值:
在将任何偏差返回到其初始位置时减少振荡
恢复到初始位置变得更慢
也会降低P的效果
特技飞行:增加D
平缓飞行:减小 D
用于特技飞行
增加 P 的值直到振荡开始,然后稍微后退
更改 I 的值,直到悬停漂移不可接受,然后稍微增加
增加 D 的值,直到从剧烈的控制变化中恢复导致不可接受的恢复振荡
P现在可能需要稍微降低
稳定飞行 (RC)
增加 P 的值直到振荡开始,然后稍微后退
更改 I 的值,直到无法从偏差中恢复,然后稍微增加
减小 D 的值,直到从剧烈的控制变化中恢复变得太慢。然后稍微增加 D
P现在可能需要稍微降低
稳定飞行(AP / FPV)
增加 P 的值直到振荡开始,然后稍微后退
更改 I 的值,直到无法从偏差中恢复,然后稍微增加
减小 D 的值,直到从剧烈的控制变化中恢复变得太慢。然后稍微增加 D
P现在可能需要稍微降低。
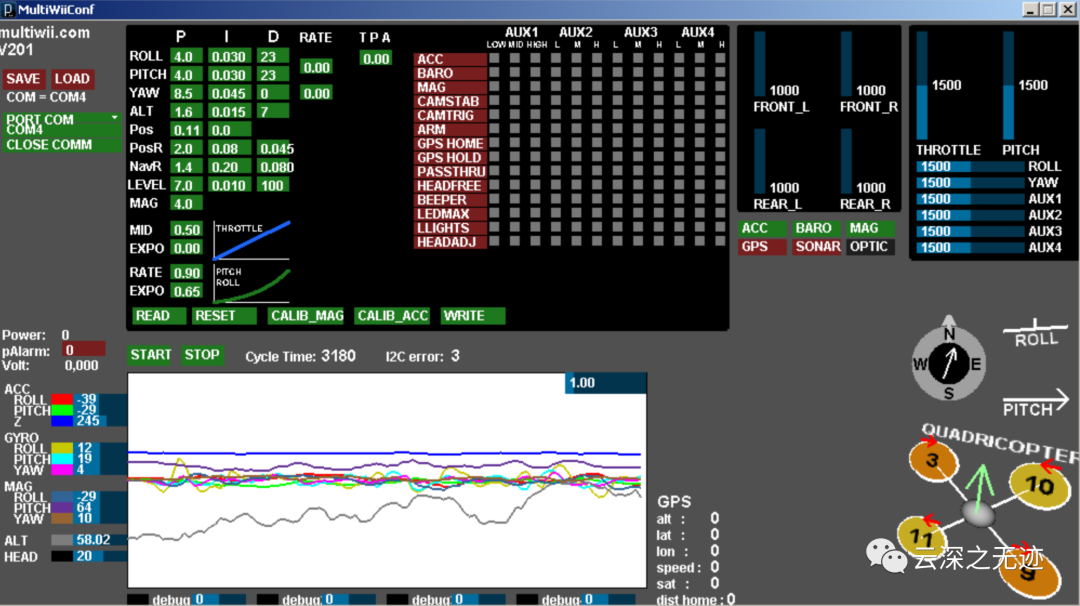
有个简单的调参窗口
其次支持的各种传感器有:
陀螺仪:
L3G4200D
ITG3200
MPU6050
MPU3050
IDG-650、ISZ-650(Wii Motion Plus)
加速度计:
LIS3L02AL
MMA7455
ADXL345
BMA180a
BMA020
LIS3LV02
LSM303DLx
MPU6050
MPU3050
气压计/高度计:
BMP085
MS561101BA
磁力计
MAG3110
HMC5843
HMC5883
AK8975
全球定位系统
带串行输出的 GPS,支持以下协议:
UBLOX
NMEA
MTK 二进制(v1.6 和 v1.9)
i2c 全球定位系统
这个飞控还带给了我们一个串行的协议:
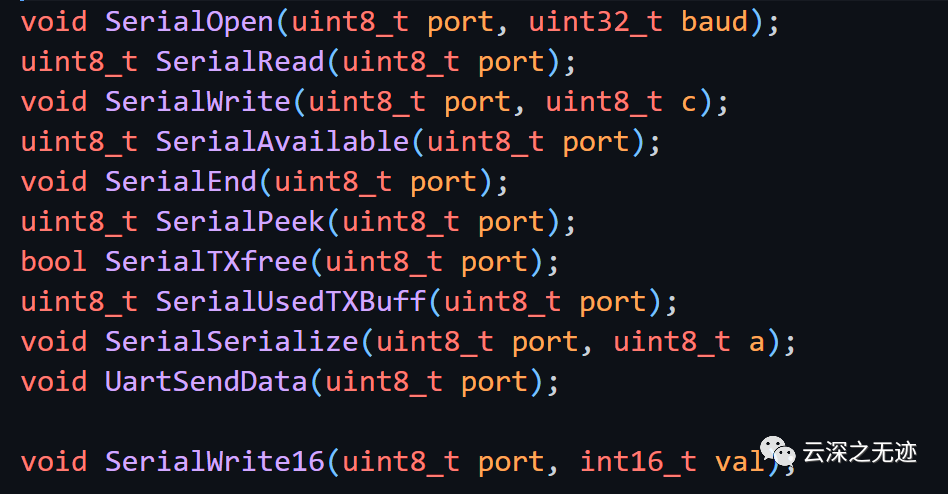
好东西
MSP 消息的一般格式为:
<前导>,<方向>,<大小>,<命令>,,
在哪里:
preamble= ASCII 字符 '$M'
direction= ASCII 字符“<”如果到 MWC 或“>”如果来自 MWC
size = 数据字节数,二进制。在向 MWC 提出数据请求的情况下可以为零
command = message_id 根据下表
data= 如下表。UINT16 值是 LSB 在前。
crc =
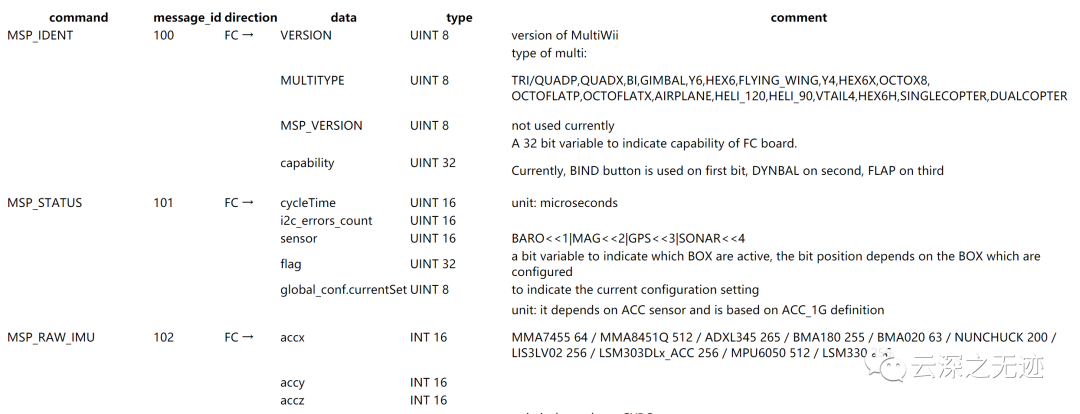
插表格太难看了
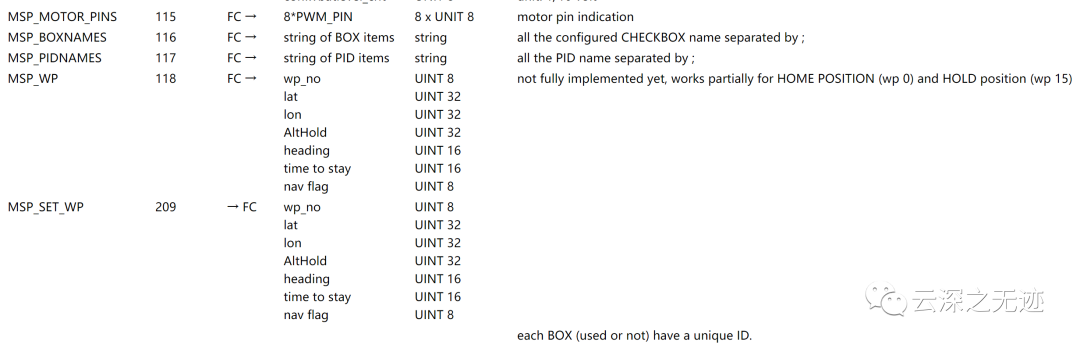
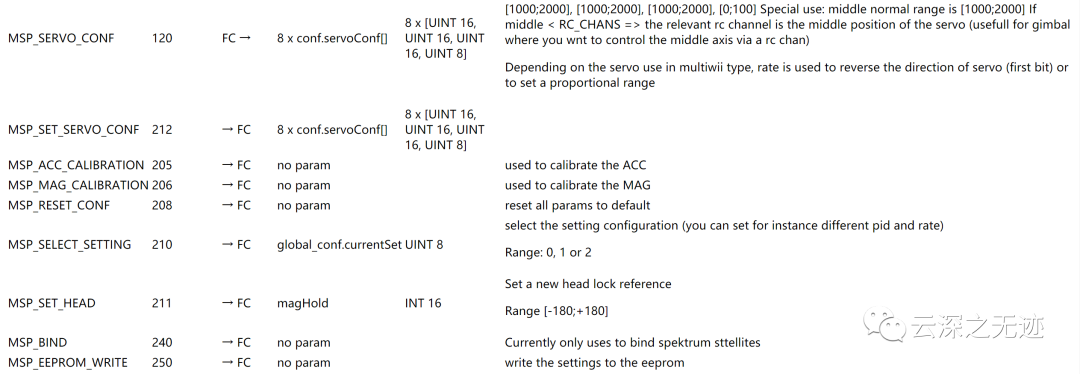
有需要看源网站

原来,MW是以这样的一种方式活到了现代
-
控制器
+关注
关注
114文章
17877浏览量
195109 -
电机
+关注
关注
145文章
9704浏览量
154799 -
代码
+关注
关注
30文章
4976浏览量
74376
原文标题:BF固件:Multi WiiCopterh固件(PID调参)
文章出处:【微信号:TT1827652464,微信公众号:云深之无迹】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
TE推出的MULTI-BEAM Plus电源连接器具有哪些优势?-赫联电子
MULTI-BEAM Plus电源连接器有何特点?-赫联电子
3mm Multi-Color with Common Cothode LED封装尺寸及参数说明
Optimize Network Applications for Multi-core
请问emWin的Multi Touch怎么用?
TrueTouch Multi-Touch CY8CTMA140怎么通过I2C进行固件升级
在AT32微控制器上创建Multi MCU IAP应用程序的方法
Multi-Agent在工控系统中的应用研究
USB DVD Super Multi Drive AW-G
Synchronized multi-spark modul

通过设计、校准固件改善器件的S参数测量



评论