 CAN总线的位定时
CAN总线的位定时

对一般的开发者来说,CAN总线的位定时概念并不常见。不过,如果给整车厂做过零部件,经受过他们的CAN通信测试考验,您可能就知道,这也是比较重要的一个知识点。
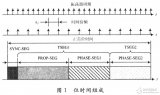
CAN报文由七个不同的场/段组成。
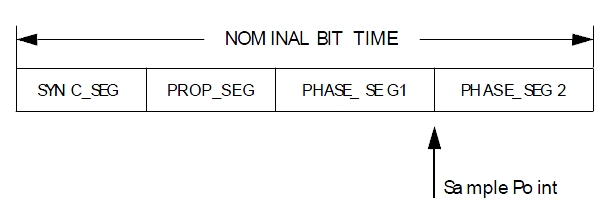
一个位,由同步段+传播段+相位缓冲段1+相位缓冲段2组成。
这四个段的时间均为基本时间单位“时间份额”的若干倍,时间份额Tq派生于振荡器周期,可以由振荡器进行分频。
由这张图可以看出,在相位缓冲段1和相位缓冲段2的交接处,藏着一个“采样点”,或者说“采样时刻”,这也是CAN通信测试中比较重要的一个测试项。
下面这张图,是一个CAN通信需求规范中的位定时要求。
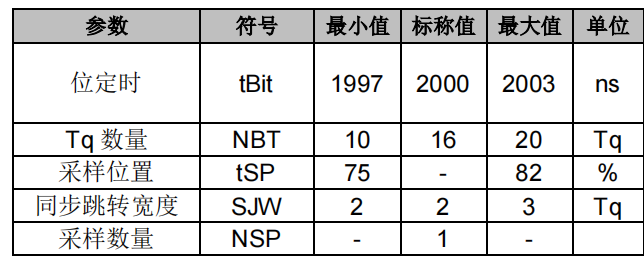
在实际的编程开发工作中,需要根据这个位定时规范,对照MCU中CAN模块的寄存器特点,对寄存器进行针对性设置。
比如飞思卡尔微控制器中的MSCAN模块,其位定时寄存器如下所示:
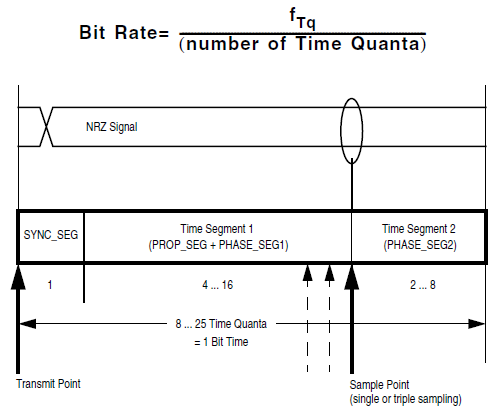
在这款CAN控制器中,把CAN的位分成了三段,同步段、段1和段2。跟CAN2.0协议中定义的“同步段+传播段+相位缓冲段1+相位缓冲段2”进行对比,便可以发现,MSCAN中的段1即CAN2.0协议中的“传播段+相位缓冲段1”。
根据规范要求,一个8us的CAN比特位包含16个Tq,采样位置在该bit位75%的时刻,所以,可以将Time Segment1 设为 11,Time Segment2 设为 4,这样,既能保证包含16个Tq(1 + Time Segment1 + Time Segment2 = 16),又可以保证采样时刻=(1 + Time Segment1)/16=75%。
审核编辑:汤梓红
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
CAN
+关注
关注
59文章
3097浏览量
473520 -
总线
+关注
关注
10文章
3057浏览量
91868 -
位定时
+关注
关注
0文章
3浏览量
5873
发布评论请先 登录
相关推荐
热点推荐
【CAN总线知识】CAN信号中的位定时段的规格
位定时规格的确定需要考虑总线的物理特性和网络的通信要求,包括晶振频率总线长度、传输延迟等。通过合理的配置这些参数,可以保证网络上不同节点之间的数据传输同步,从而确保通信的可靠性。


CAN总线工作原理及数据链路层、延时分析
为止。这一整个数据通信过程的延时为:。由此可见,CAN总线的通信距离和通信速率是和CAN总线数据通信的传输延时密切相关的。2. CAN
发表于 05-13 06:00
CAN 总线位定时参数的确定
CAN 通信中, 波特率、位周期内取样点数和位置可以编程设置, 这些设置为用户根据其应用优化网络通信性能提供了方便。优化位定时参数,能够保证信息同步,保证传输延迟和时
发表于 05-15 15:08
•6次下载
CAN总线的位定时和同步机制详细分析和探讨
控制器局域网CAN是一种用于连接汽车和工业场合中电子控制模块、传感器和执行器的串行、多主通信规范。由于CAN总线具有很强的纠错能力、支持差分收发、传输距离远等特点,因此CAN
发表于 12-12 13:29
•1.1w次阅读
CAN信号中位定时段的规格
CAN通讯中使用的是同步数据传输,CAN控制器在其通讯过程中会不停出现位同步的操作,但不同的数据通讯系统对位同步的要求是不同,为了满足其要求,我们必须更加深入的来探讨另一个概念叫位
发表于 03-13 14:09
•1803次阅读

CAN总线基础的详细资料概述
本文档的主要内容详细介绍的是CAN总线基础的详细资料概述包括了:概述,汽车总线与CAN标准,CAN的通信机制,数据帧,错误检测与错误帧,
发表于 11-29 15:31
•123次下载
CAN总线信号传输位定时与位同步是如何实现的
由于CAN协议使用非破坏性的位总线仲裁和显性应答位,信号从发送器传输到接收器再返回到接收器必须在一个位时间内完成。
发表于 03-21 11:23
•3075次阅读
基于独立通信控制器SJA1000实现对CAN总线位定时参数进行研究
CAN总线是一种有效支持分布式控制和实时控制的、多主的异步串行通信网络。由于CAN总线具有较强的纠错能力,支持差分收发,适合高噪声环境,具有较远的传输距离,并且Philips和Inte




评论