 机器人控制设计多核异构成趋势,不同内核优势各异的处理元件多样搭配
机器人控制设计多核异构成趋势,不同内核优势各异的处理元件多样搭配

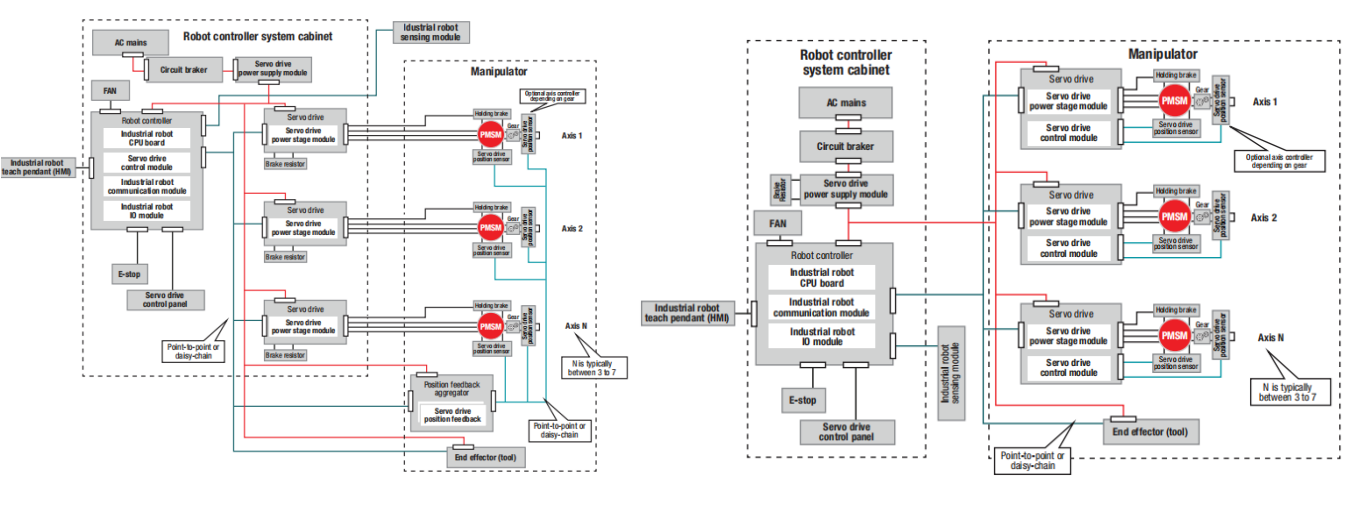
电子发烧友网报道(文/李宁远)工业机器人我们通常分为几个部分:控制器系统、机械手(驱动系统)、示教器、视觉与传感器、末端执行器。不同类型的工业机器人会有在轴设计和轴数上有些不同,也就是在驱动系统上略有不同,比如关节型机器人具有旋转轴,旋转轴的数量从简单的三轴结构到多个关节不等,CSARA具有两个平行轴等等,但在整体的控制设计上,都采取集中式设计或者分散式设计。
控制器系统
我们常常称机器人控制器系统是机器人的大脑,这里面包括了运动控制器、内部和外部通信系统以及任何潜在的功率级。潜在的功率级指的是,如果机器人要移动重物,肯定需要在电机上施加足够的力才能实现该功能。这个力由电能产生,并从功率级提供给电机。这个功率影响机器人属于高压系统还是低压系统。
集中式的机器人系统,机器人的控制柜会集中驱动系统的大多数电子模块,而在分散式系统中,这些模块中的其中一些模块将移至机器人的机械手驱动系统中,以支持多种外形尺寸,包括机柜的外形尺寸、电缆等。
目前大多机器人厂商都是提供集中式的控制系统,这样更方便。因为在分散式的系统中,伺服驱动相关电子器件的运行环境与在集中式系统中完全不同,通常需要对部分系统进行重新开发。
控制与伺服驱动
在自动化行业,伺服电机控制是一个老生常谈的通用技术了,工业4.0的兴起加速了自动化系统的升级,这也增加了伺服驱动的升级。现在的自动化系统要求伺服驱动能控制更多的轴数,能实现更多智能化的功能。
在控制系统需求还没有现在这么复杂的阶段,最常见的设计是用MCU以及FPGA来执行控制算法,并提供外设以连接至驱动器输出和电机反馈。这种设计我们已经见过很多了,基本上国内外做MCU的厂商都会涉及一部分这样的业务,国外知名的像TI的C2000系列,ST的STM32系列等等,国内知名的同样不少,国民的N32系列,峰岹的FU68系列,兆易的GD32E系列等等。功能要求不多的控制,单颗或多颗MCU就够了,有些会视情况加FPGA。加FPGA一般就是MCU负责通讯处理、系统母线监测和温度监测等、人机交互界面驱动等功能,FPGA负责逻辑处理和运动控制等功能,实现对整个伺服系统的协同控制。
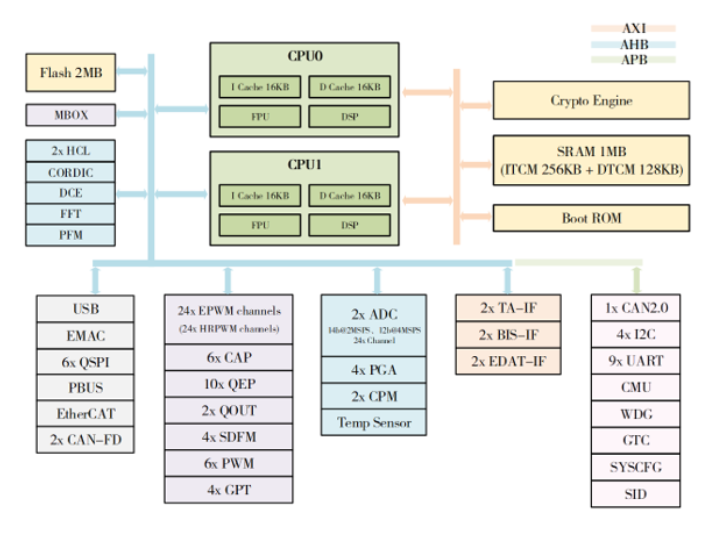
就目前国内外MCU厂商提供的用于机器人控制器MCU来看,M4以及M4F内核居多,支持FPU浮点运算,主频也够高,可满足各种运动算法高算力需求,外设资源各异。M7内核加DSP的异构架构在高端领域的工业机器人中也很有优势。
(双核M7+M4 STM32H747,ST)
为了减少外部板需求,缩小空间降低成本,越来越多功能(通信、PLC等等)加入控制板中,集成性的提高意味着硬件性能也必须要跟上。从机器人控制系统的发展趋势里可以肯定的是多核异构架构才能满足机器人系统全部的处理需求。MCU+FPGA异构架构,MCU+DSP异构架构,MCU+MPU架构等多核异构设计在以后的机器人中会越来越常见。
以往厂商会优先考虑采用DSP来优化控制算法,但现在实时处理数据的能力越来越重要,因此带宽对伺服驱动是一个非常重要的指标,足够的带宽才能同时处理多个轴的输入,并留有足够的裕量用于其他功能。DSP在机器人控制里独立的方案越来越少,独立DSP正在越来越多地转向SoC的一个处理单元。
实时处理数据的能力越来越重要,所以Arm Cortex-A和Cortex-R内核在现在的机器人应用里也越来越常见,二者各有千秋。Cortex-A可以提供我们上面说到的高带宽,实现机器人对多轴数据的实时快速处理,高带宽也很方便进行网络通信等其他功能。但相比之下它缺少Cortex-R内核的实时组件,单论伺服控制方面Cortex-R会更适合。
小结
机器人系统控制往多核处理器靠拢,不同内核之间分散各个回路可以使专用于每个回路的处理带宽最大化,这肯定会提升系统的控制处理能力,并完成更多其它功能的实现。上面这些不同内核,优势各异的处理元件如何选择如何搭配在机器人控制设计中有着很多玩法与变化。
控制器系统
我们常常称机器人控制器系统是机器人的大脑,这里面包括了运动控制器、内部和外部通信系统以及任何潜在的功率级。潜在的功率级指的是,如果机器人要移动重物,肯定需要在电机上施加足够的力才能实现该功能。这个力由电能产生,并从功率级提供给电机。这个功率影响机器人属于高压系统还是低压系统。
集中式的机器人系统,机器人的控制柜会集中驱动系统的大多数电子模块,而在分散式系统中,这些模块中的其中一些模块将移至机器人的机械手驱动系统中,以支持多种外形尺寸,包括机柜的外形尺寸、电缆等。
目前大多机器人厂商都是提供集中式的控制系统,这样更方便。因为在分散式的系统中,伺服驱动相关电子器件的运行环境与在集中式系统中完全不同,通常需要对部分系统进行重新开发。
控制与伺服驱动
在自动化行业,伺服电机控制是一个老生常谈的通用技术了,工业4.0的兴起加速了自动化系统的升级,这也增加了伺服驱动的升级。现在的自动化系统要求伺服驱动能控制更多的轴数,能实现更多智能化的功能。
在控制系统需求还没有现在这么复杂的阶段,最常见的设计是用MCU以及FPGA来执行控制算法,并提供外设以连接至驱动器输出和电机反馈。这种设计我们已经见过很多了,基本上国内外做MCU的厂商都会涉及一部分这样的业务,国外知名的像TI的C2000系列,ST的STM32系列等等,国内知名的同样不少,国民的N32系列,峰岹的FU68系列,兆易的GD32E系列等等。功能要求不多的控制,单颗或多颗MCU就够了,有些会视情况加FPGA。加FPGA一般就是MCU负责通讯处理、系统母线监测和温度监测等、人机交互界面驱动等功能,FPGA负责逻辑处理和运动控制等功能,实现对整个伺服系统的协同控制。
就目前国内外MCU厂商提供的用于机器人控制器MCU来看,M4以及M4F内核居多,支持FPU浮点运算,主频也够高,可满足各种运动算法高算力需求,外设资源各异。M7内核加DSP的异构架构在高端领域的工业机器人中也很有优势。
(双核M7+M4 STM32H747,ST)
为了减少外部板需求,缩小空间降低成本,越来越多功能(通信、PLC等等)加入控制板中,集成性的提高意味着硬件性能也必须要跟上。从机器人控制系统的发展趋势里可以肯定的是多核异构架构才能满足机器人系统全部的处理需求。MCU+FPGA异构架构,MCU+DSP异构架构,MCU+MPU架构等多核异构设计在以后的机器人中会越来越常见。
以往厂商会优先考虑采用DSP来优化控制算法,但现在实时处理数据的能力越来越重要,因此带宽对伺服驱动是一个非常重要的指标,足够的带宽才能同时处理多个轴的输入,并留有足够的裕量用于其他功能。DSP在机器人控制里独立的方案越来越少,独立DSP正在越来越多地转向SoC的一个处理单元。
实时处理数据的能力越来越重要,所以Arm Cortex-A和Cortex-R内核在现在的机器人应用里也越来越常见,二者各有千秋。Cortex-A可以提供我们上面说到的高带宽,实现机器人对多轴数据的实时快速处理,高带宽也很方便进行网络通信等其他功能。但相比之下它缺少Cortex-R内核的实时组件,单论伺服控制方面Cortex-R会更适合。
小结
机器人系统控制往多核处理器靠拢,不同内核之间分散各个回路可以使专用于每个回路的处理带宽最大化,这肯定会提升系统的控制处理能力,并完成更多其它功能的实现。上面这些不同内核,优势各异的处理元件如何选择如何搭配在机器人控制设计中有着很多玩法与变化。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
213文章
31429浏览量
223599
发布评论请先 登录
相关推荐
热点推荐
Neway电机方案在机器人技术方面的优势
Neway电机方案在机器人技术方面的优势Neway电机方案在机器人技术方面展现出显著优势,其通过全国产器件替代、高功率密度设计、多重保护功能、宽温工作能力以及快速交付与供应链稳定性等核
发表于 03-30 09:39
2026 年全球五大机器人趋势 - 国际机器人联合会报告
领域的人工智能与自主性 运用人工智能实现独立作业的机器人正日益普及。在此背景下,人工智能的核心价值在于赋能机器人提升自主性。不同类型的 AI 推动着这一趋势:: 分析型 AI 可处理
机器人内部零配件的生产加工厂从哪找?
传动部件到流体控制元件,力存科技能够提供一站式的配件解决方案。特别是公司生产的机器人五金配件,在市场上获得了广泛认可。
品质保证严格 :公司建立了完善的质量管理体系,从原材料采购到成品出货,每一个环节都
发表于 12-09 18:22
高精度机器人控制的核心——基于 MYD-LT536 开发板的精密运动控制方案
,MYD-LT536 具备以下突出优势:
1. 高算力与实时性兼顾
四核 Cortex-A55 架构可并行运行多线程控制任务,满足多轴机器人同步控制与动态补偿算法的实时计算需求;
T5
发表于 11-14 15:48
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
瑞芯微RK3576 AIoT处理器处理器凭借其卓越的多屏异显与8路摄像头接入能力,为机器人领域带来革新。米尔电子MYD-LR3576开发板实测数据显示,在高负载下CPU占用仅34%,完美实现多路视觉
发表于 10-29 16:41
智能决策、2厘米级控制,星灿机器人发布割草机器人
电子发烧友网报道(文/莫婷婷)传统机器人泛化性差,智能程度相对较低。具身智能机器人具有高通用性,可在各类场景完成复杂任务,包括快速理解复杂环境、能够处理任意物体、自主处理

机器人芯片:驱动智能机器的核心技术引擎
上系统(SoC),其技术内涵与设计哲学正深刻塑造着机器人的智能化未来。 异构架构:性能与能效的平衡艺术 现代机器人芯片的核心特征是异构计算。单一类型的
【老法师】多核异构处理器中M核程序的启动、编写和仿真
有很多研究单片机的小伙伴在面对多核异构处理器时,可能会对多核的启动流程感到困惑——因为不熟悉GCC编程和GDB调试,所以也无法确定多核


机器人芯片:智能机器的“大脑”与未来趋势
、低功耗和强适应性的方向演进,推动机器人应用迈向更广阔的领域。 机器人芯片的关键作用 机器人芯片主要包括中央处理器(CPU)、图形处理
工业机器人的特点
机器人是关键。工业互联网是通过端上的数据传输,经过大数据分析和云计算处理,再进行智能化决策的一整个过程,其中端的数据传输是基础。工业互联网的端包括机器人、传感器等一切线下连接端口。因此发展工业
发表于 07-26 11:22
匠芯创科技M7000系列选型表分享 RISC-V内核的高性能DSP实时处理器 适配机器人
匠芯创科技M7000系列选型表分享 RISC-V内核的高性能DSP实时处理器 适配机器人
盘点#机器人开发平台
地瓜机器人RDK X5开发套件地瓜机器人RDK X5开发套件产品介绍 旭日5芯片10TOPs算力-电子发烧友网机器人开发套件 Kria KR260机器人开发套件 Kria KR260-
发表于 05-13 15:02
【「# ROS 2智能机器人开发实践」阅读体验】机器人入门的引路书
ROS的全称:Robot Operating System 机器人操作系统
ROS的 目的 :ROS支持通用库,是通信总线,协调多个传感器
为了解决机器人里各厂商模块不通用的问题,让机器人快速开发
发表于 04-30 01:05
【「# ROS 2智能机器人开发实践」阅读体验】+内容初识
出有用的信息,如障碍物的位置和形状。对于摄像头数据,可以使用 OpenCV 等图像处理库进行图像识别、目标跟踪等操作,为机器人的导航和决策提供支持。
运动控制:运动控制是
发表于 04-27 11:24



评论