 基于RT-Thread实现can通讯例程讲解
基于RT-Thread实现can通讯例程讲解

首先粘贴出官方提供的can例程代码,根据需要我将部分内容做了修改,供大家参考!
can_sample中包换以下函数: 接收数据回调函数 static rt_err_t can_rx_call(rt_device_t dev, rt_size_t size)
定义can接收线程:static void can_rx_thread(void *parameter)
查找can设备:rt_device_t rt_device_find(const char* name);
打开can设备:rt_err_t rt_device_open(rt_device_t dev, rt_uint16_t oflags);
发生can数据:rt_size_t rt_device_write(rt_device_t dev, rt_off_t pos, const void* buffer, rt_size_t size);
在int can_sample(int argc, char *argv[])中调用can接收线程
其中对于描述是有两个段代码可供参考
/*
* 程序清单:这是一个 CAN 设备使用例程
* 例程导出了 can_sample 命令到控制终端
* 命令调用格式:can_sample can1
* 命令解释:命令第二个参数是要使用的 CAN 设备名称,为空则使用默认的 CAN 设备
* 程序功能:通过 CAN 设备发送一帧,并创建一个线程接收数据然后打印输出。
*/
#include
#include "rtdevice.h"
#define CAN_DEV_NAME "can1" /* CAN 设备名称 */
static struct rt_semaphore rx_sem; /* 用于接收消息的信号量 */
static rt_device_t can_dev; /* CAN 设备句柄 */
/* 接收数据回调函数 */
static rt_err_t can_rx_call(rt_device_t dev, rt_size_t size)
{
/* CAN 接收到数据后产生中断,调用此回调函数,然后发送接收信号量 */
rt_sem_release(&rx_sem);
return RT_EOK;
}
static void can_rx_thread(void *parameter)
{
int i;
rt_err_t res;
struct rt_can_msg rxmsg = {0};
/* 设置接收回调函数 */
rt_device_set_rx_indicate(can_dev, can_rx_call);
while (1)
{
/* hdr 值为 - 1,表示直接从 uselist 链表读取数据 */
rxmsg.hdr = -1;
/* 阻塞等待接收信号量 */
rt_sem_take(&rx_sem, RT_WAITING_FOREVER);
/* 从 CAN 读取一帧数据 */
rt_device_read(can_dev, 0, &rxmsg, sizeof(rxmsg));
/* 打印数据 ID 及内容 */
rt_kprintf("ID:%x", rxmsg.id);
for (i = 0; i < 8; i++)
{
rt_kprintf("%2x", rxmsg.data[i]);
}
rt_kprintf("\n");
}
}
int can_sample(int argc, char *argv[])
{
struct rt_can_msg msg = {0};
rt_err_t res;
rt_size_t size;
rt_thread_t thread;
char can_name[RT_NAME_MAX];
if (argc == 2)
{
rt_strncpy(can_name, argv[1], RT_NAME_MAX);
}
else
{
rt_strncpy(can_name, CAN_DEV_NAME, RT_NAME_MAX);
}
/* 查找 CAN 设备 */
can_dev = rt_device_find(can_name);
if (!can_dev)
{
rt_kprintf("find %s failed!\n", can_name);
return RT_ERROR;
}
/* 初始化 CAN 接收信号量 */
rt_sem_init(&rx_sem, "rx_sem", 0, RT_IPC_FLAG_FIFO);
/* 以中断接收及发送方式打开 CAN 设备 */
res = rt_device_open(can_dev, RT_DEVICE_FLAG_INT_TX | RT_DEVICE_FLAG_INT_RX);
RT_ASSERT(res == RT_EOK);
/* 创建数据接收线程 */
thread = rt_thread_create("can_rx", can_rx_thread, RT_NULL, 1024, 25, 10);
if (thread != RT_NULL)
{
rt_thread_startup(thread);
}
else
{
rt_kprintf("create can_rx thread failed!\n");
}
msg.id = 0x78; /* ID 为 0x78 */
msg.ide = RT_CAN_STDID; /* 标准格式 */
msg.rtr = RT_CAN_DTR; /* 数据帧 */
msg.len = 8; /* 数据长度为 8 */
/* 待发送的 8 字节数据 */
msg.data[0] = 0x00;
msg.data[1] = 0x11;
msg.data[2] = 0x22;
msg.data[3] = 0x33;
msg.data[4] = 0x44;
msg.data[5] = 0x55;
msg.data[6] = 0x66;
msg.data[7] = 0x77;
/* 发送一帧 CAN 数据 */
size = rt_device_write(can_dev, 0, &msg, sizeof(msg));
if (size == 0)
{
rt_kprintf("can dev write data failed!\n");
}
return res;
}
void can_send_test(void)
{
struct rt_can_msg msg = {0};
rt_size_t size;
static rt_uint8_t num = 0;
msg.id = 0x78; /* ID 为 0x78 */
msg.ide = RT_CAN_STDID; /* 标准格式 */
msg.rtr = RT_CAN_DTR; /* 数据帧 */
msg.len = 8; /* 数据长度为 8 */
/* 待发送的 8 字节数据 */
msg.data[0] = 0x00;
msg.data[1] = num++; //can发送数据随意更改
msg.data[2] = 0x22;
msg.data[3] = 0x33;
msg.data[4] = num++;
msg.data[5] = 0x55;
msg.data[6] = 0x66;
msg.data[7] = 0x77;
/* 发送一帧 CAN 数据 */
size = rt_device_write(can_dev, 0, &msg, sizeof(msg));
if (size == 0)
{
rt_kprintf("can dev write data failed!\n");
}
}
/* 导出到 msh 命令列表中 */
MSH_CMD_EXPORT(can_sample, can device sample);
MSH_CMD_EXPORT(can_send_test, can send test);
另外一个版本,实现的功能是一样的
/*
* 程序清单:这是一个 CAN 设备使用例程
* 例程导出了 can_sample 命令到控制终端
* 命令调用格式:can_sample can1
* 命令解释:命令第二个参数是要使用的 CAN 设备名称,为空则使用默认的 CAN 设备
* 程序功能:通过 CAN 设备发送一帧,并创建一个线程接收数据然后打印输出。
*/
#include
#include "rtdevice.h"
#define CAN_DEV_NAME "can1" /* CAN 设备名称 */
static struct rt_semaphore rx_sem; /* 用于接收消息的信号量 */
static rt_device_t can_dev; /* CAN 设备句柄 */
#define THREAD_PRIORITY 25
#define THREAD_STACK_SIZE 512
#define THREAD_TIMESLICE 5
static rt_thread_t tid1 = RT_NULL;
/* 接收数据回调函数 */
static rt_err_t can_rx_call(rt_device_t dev, rt_size_t size) {
/* CAN 接收到数据后产生中断,调用此回调函数,然后发送接收信号量 */
rt_sem_release(&rx_sem);
return RT_EOK;
}
static void can_rx_thread(void *parameter) {
int i;
rt_err_t res;
struct rt_can_msg rxmsg = {0};
/* 设置接收回调函数 */
rt_device_set_rx_indicate(can_dev, can_rx_call);
while (1) {
/* hdr 值为 - 1,表示直接从 uselist 链表读取数据 */
rxmsg.hdr = -1;
/* 阻塞等待接收信号量 */
rt_sem_take(&rx_sem, RT_WAITING_FOREVER);
/* 从 CAN 读取一帧数据 */
rt_device_read(can_dev, 0, &rxmsg, sizeof(rxmsg));
/* 打印数据 ID 及内容 */
rt_kprintf("ID:%x", rxmsg.id);
for (i = 0; i < 8; i++) {
rt_kprintf("%2x", rxmsg.data[i]);
}
rt_kprintf("\n");
}
}
/* 线程 1 的入口函数 */
static void thread1_entry(void *parameter) {
struct rt_can_msg msg = {0};
unsigned long count = 0;
msg.id = 0x78; /* ID 为 0x78 */
msg.ide = RT_CAN_STDID; /* 标准格式 */
msg.rtr = RT_CAN_DTR; /* 数据帧 */
msg.len = 8; /* 数据长度为 3 */
/* 待发送的 3 字节数据 */
msg.data[0] = 0x00;
msg.data[1] = 0x11;
msg.data[2] = 0x22;
msg.data[3] = 0x00;
msg.data[4] = 0x11;
msg.data[5] = 0x00;
msg.data[6] = 0x11;
msg.data[7] = 0x22;
rt_kprintf("send %ld \n", ++count);
while (1) {
/* 线程 1 采用低优先级运行,一直打印计数值 */
rt_device_write(can_dev, 0, &msg, sizeof(msg));
rt_kprintf("send %ld \n", ++count);
rt_thread_mdelay(500);
}
}
int can_sample(int argc, char *argv[]) {
rt_err_t res;
rt_size_t size;
rt_thread_t thread;
char can_name[RT_NAME_MAX];
if (argc == 2) {
rt_strncpy(can_name, argv[1], RT_NAME_MAX);
} else {
rt_strncpy(can_name, CAN_DEV_NAME, RT_NAME_MAX);
}
/* 查找 CAN 设备 */
can_dev = rt_device_find(can_name);
if (!can_dev) {
rt_kprintf("find %s failed!\n", can_name);
return RT_ERROR;
}
/* 初始化 CAN 接收信号量 */
rt_sem_init(&rx_sem, "rx_sem", 0, RT_IPC_FLAG_FIFO);
/* 以中断接收及发送方式打开 CAN 设备 */
res = rt_device_open(can_dev, RT_DEVICE_FLAG_INT_TX | RT_DEVICE_FLAG_INT_RX);
/* 设置 CAN 的工作模式为正常工作模式 */
res = rt_device_control(can_dev, RT_CAN_CMD_SET_MODE, (void *)RT_CAN_MODE_NORMAL);
res = rt_device_control(can_dev, RT_CAN_CMD_SET_BAUD, (void *)CAN500kBaud);
RT_ASSERT(res == RT_EOK);
/* 创建数据接收线程 */
thread = rt_thread_create("can_rx", can_rx_thread, RT_NULL, 1024, 25, 10);
if (thread != RT_NULL) {
rt_thread_startup(thread);
} else {
rt_kprintf("create can_rx thread failed!\n");
}
if (size == 0) {
rt_kprintf("can dev write data failed!\n");
}
/* 创建线程 1,名称是 thread1,入口是 thread1_entry*/
tid1 = rt_thread_create("thread1",
thread1_entry, RT_NULL,
THREAD_STACK_SIZE,
THREAD_PRIORITY, THREAD_TIMESLICE);
/* 如果获得线程控制块,启动这个线程 */
if (tid1 != RT_NULL)
rt_thread_startup(tid1);
else
rt_kprintf("start can send fail\n");
return res;
}
/* 导出到 msh 命令列表中 */
MSH_CMD_EXPORT(can_sample, can device sample);
代码编译完成,下载。串口运行:can_sample,打开创芯科技CAN卡,打开电脑的USB CAN工具
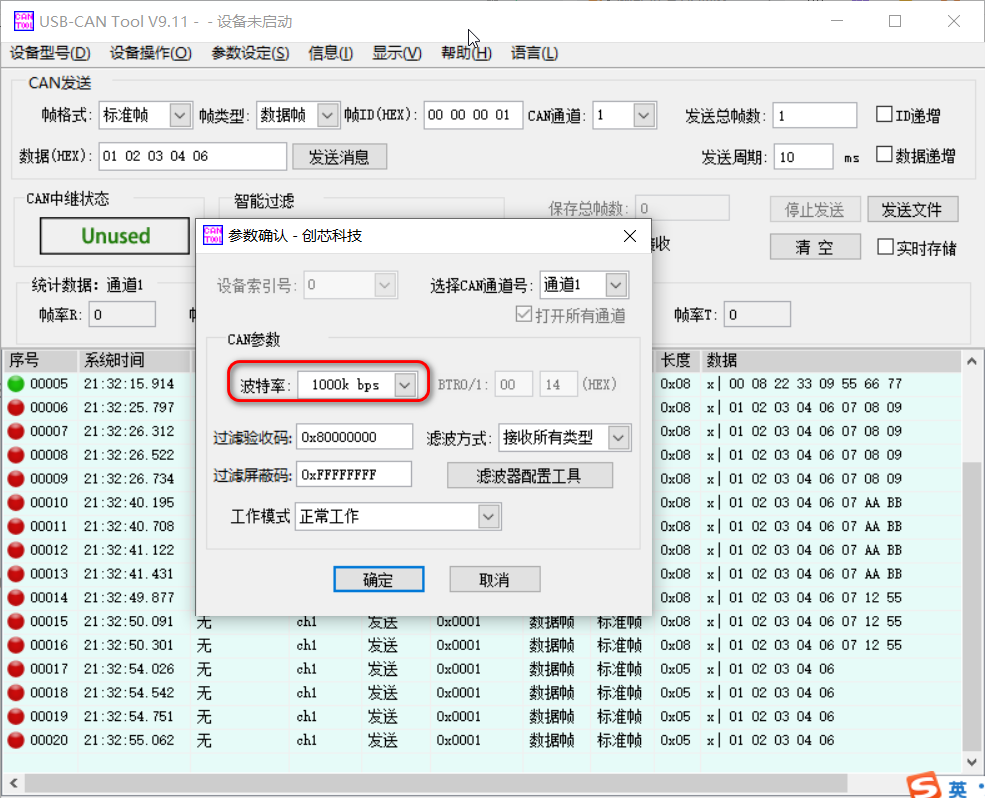
打开USB转CAN,选择对应波特率,这里配置为1Mbps。
重启,再次运行can_sample,发现,接收到STM32发出的CAN数据帧。
多次运行 can_send_test,电脑端可以接受数据。
审核编辑:汤梓红
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
CAN
+关注
关注
59文章
3107浏览量
473840 -
RT-Thread
+关注
关注
32文章
1657浏览量
45457
发布评论请先 登录
相关推荐
热点推荐
RT-Thread上CAN实践
开箱测试RT-Thread官方已完成了对英飞凌XMC7200EVK的移植,通过shell可以看到做好了uart3的console。本文将介绍如何进行RT-ThreadCan移植。接下来我们要完成CAN_FD的驱动移植,并正常启动

【原创精选】RT-Thread征文精选技术文章合集
开发板的详细步骤例程stm32裸机RT—thread开始创建线程详解基于标准库的keil移植到RT-thread例程
发表于 07-26 14:56
RT-Thread编程指南
RT-Thread编程指南——RT-Thread开发组(2015-03-31)。RT-Thread做为国内有较大影响力的开源实时操作系统,本文是RT-Thread实时操作系统的编程指南
发表于 11-26 16:06
•0次下载
RT-Thread上的CAN总线介绍以及驱动编写
昨晚很荣幸邀请到李工在RT-Thread微信群进行RT-Thread上的CAN驱动和应用讲座。小编整理了讲座内容,特发出讲义以供享用。
RT-Thread AI kit开源:轻松实现一键部署AI模型至 RT-Thread
RT-AK 是 RT-Thread 团队为 RT-Thread 实时操作系统所开发的 AI 套件,能够一键将 AI 模型部署到 RT-Thread 项目中,让用户可以 在统一...
发表于 01-25 18:18
•4次下载

基于 Keil MDK 移植 RT-Thread Nano
本文介绍如何基于 Keil MDK 移植 RT-Thread Nano ,并以一个 stm32f103 的基础工程作为示例进行讲解。 RT-Thread Nano 已集成在 Keil MD...
发表于 01-26 17:04
•17次下载
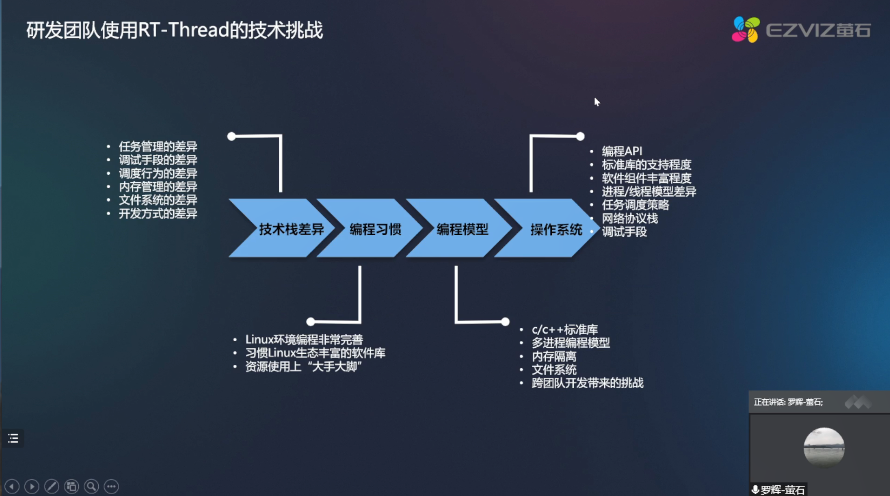
RT-Thread全球技术大会:萤石研发团队使用RT-Thread的技术挑战
RT-Thread全球技术大会:研发团队使用RT-Thread的技术挑战 审核编辑:彭静
RT-Thread全球技术大会:RT-Thread对POSIX的实现情况介绍
RT-Thread全球技术大会:RT-Thread对POSIX的实现情况介绍 审核编辑:彭静
RT-Thread学习笔记 RT-Thread的架构概述
RT-Thread 简介 作为一名 RTOS 的初学者,也许你对 RT-Thread 还比较陌生。然而,随着你的深入接触,你会逐渐发现 RT-Thread 的魅力和它相较于其他同类型 RTOS

RT-Thread文档_RT-Thread 潘多拉 STM32L475 上手指南
RT-Thread文档_RT-Thread 潘多拉 STM32L475 上手指南
发表于 02-22 18:23
•10次下载

4月10日深圳场RT-Thread线下workshop,探索RT-Thread混合部署新模式!
4月10日我们将在深圳福田举办RT-Thread混合部署线下workshop,在瑞芯微RK3568平台上实现同时运行RT-Thread和linux,本次workshop邀请到RT-Thread




评论