 用于主动安全应用的FMCW雷达设计
用于主动安全应用的FMCW雷达设计

下面显示了一个独特的工具链,用于对完整的 77 GHz FMCW 雷达系统进行建模和仿真,包括波形生成、天线表征、信道干扰和噪声,以及用于确定距离和速度的数字信号处理 (DSP) 算法。对噪声、非线性和频率相关性等射频损伤的仿真和建模使我们能够测试使用数据表参数描述的“现成”组件的行为,并提供有关特定组件配置和相关成本可实现的性能的信息。
调频连续波形 (FMCW) 雷达正变得越来越流行,尤其是在自适应巡航控制 (ACC) 等汽车应用中。FMCW系统的发射机发送高频、大带宽的啁啾信号。发射的信号击中目标并以时间延迟和取决于目标距离和相对速度的频移反射回接收器。
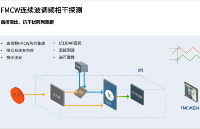
通过混合发射和接收信号,时间延迟对应于产生拍频的频率差。这允许对目标距离进行非常准确和可靠的估计[1]。通常,多个天线用于空间处理和波束成形,以使检测更可靠或具有定向系统,如图 1 所示。
图 1: FMCW 雷达系统的结构。
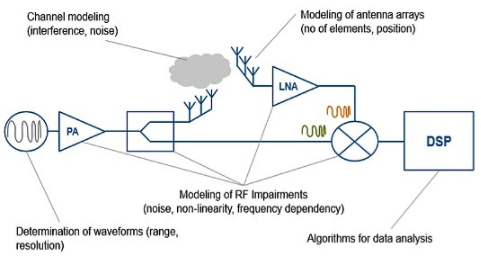
在 FMCW 雷达的设计、建模和仿真中,设计人员必须考虑的不仅仅是标称行为。在使用雷达方程确定基本设计参数后,设计人员必须分析射频前端引入的缺陷的影响。在超大带宽上运行的组件之间的非线性、噪声、频率选择性和失配会降低可检测信号的实际动态范围。
通过对射频前端进行精确建模,设计人员可以在硬件架构和数字信号处理算法之间进行复杂性权衡。此外,他们可以评估是否可以重用以前的实现来重新定位雷达以增强规格,或者是否可以直接将现成的组件用于前端实现。
FMCW波形的测定
在设计新雷达系统时,我们必须解决的第一个问题是确定三角啁啾波形的参数,以便在指定范围内实现所需的分辨率。我们考虑一种用于自动巡航控制的汽车远程雷达,它通常占据 77 GHz 左右的频段[2, 3]。
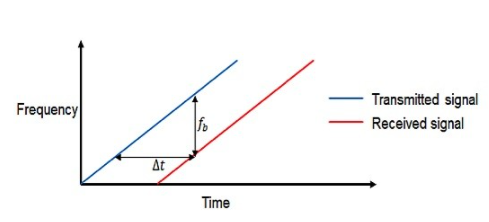
如图 2 所示,接收信号是发射信号的衰减和时间延迟副本,其中延迟 Δt 与目标的距离有关。因为信号总是在一个频带上扫过,所以在扫描过程中的任何时刻,发射信号和接收信号之间的频率差fb(通常称为拍频)是恒定的。因为扫描是线性的,所以可以从拍频推导出时间延迟,然后从时间延迟推导出目标的距离。
图 2:发送和接收信号的波形。
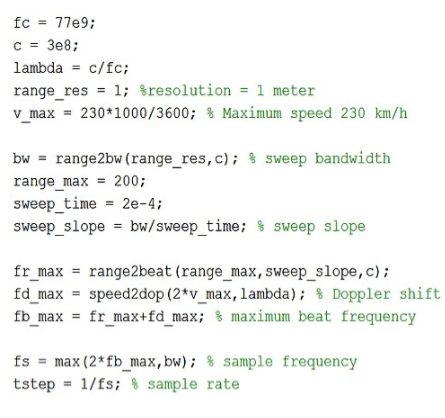
使用MATLAB和相控阵系统工具箱功能,我们可以根据用户指定的距离分辨率和最大速度轻松确定工作在 77 GHz 的雷达的基本波形参数,例如扫描带宽和斜率、最大拍频和采样频率,如如图 3 所示。
图 3:确定 FMCW 啁啾波形的参数。
对射频组件、噪声和非线性进行建模
一旦确定了啁啾参数,我们就可以继续对雷达系统的收发器进行建模。
雷达系统的前端包括发射机、接收机和天线。这些模型在工具箱中提供。我们将这些模型参数化为所需的值,例如相位噪声和热噪声。或者,我们可以使用Simulink中提供的 RF 组件对发射器和接收器进行建模,使用SimRF对组件级噪声、非线性和频率选择的影响进行建模。图 4 显示了我们如何使用 SimRF 模块对射频前端进行建模。该库提供了一个电路包络求解器,用于快速仿真射频系统和组件,例如放大器、混频器和 S 参数模块。
图 4:使用 SimRF 电路包络模块在 Simulink 中建模的射频元件。
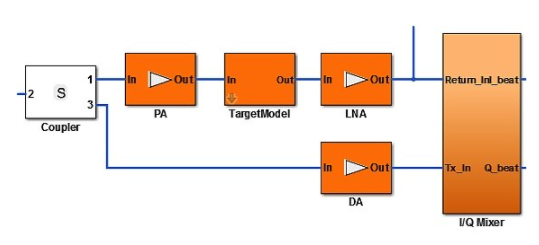
我们可以详细描述收发器的架构,并为每个前端元件使用数据表参数。以直接转换 I/Q 混频器为例,我们对其进行建模,如图 5 所示。该元件解调接收到的信号,并将其与原始传输的波形相乘。
图 5: I/Q 直接转换混频器的结构。
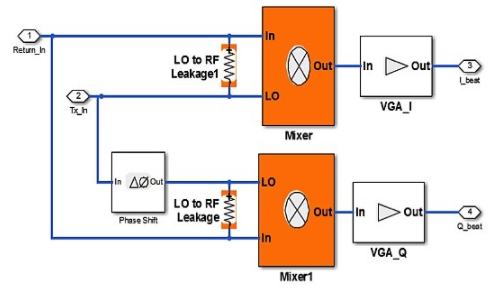
I中使用的两个乘法器的参数/Q 混合器已直接在块上设置或使用工作区变量。
使用这种配置,可以很容易地尝试不同的设置并通过使用不同的数据表参数来模拟现成的组件来探索设计空间。
完整的系统模拟
在雷达系统的所有组件都正确参数化后,我们可以进行完整的桌面模拟,以测试系统在不同的测试条件下是否能正常工作。
运行此仿真时,该模型不仅提供了相对速度和物体距离的估计值,而且还可视化了发射和接收信号的频谱,如图 6 所示。
图 6:发射和接收信号的频谱。
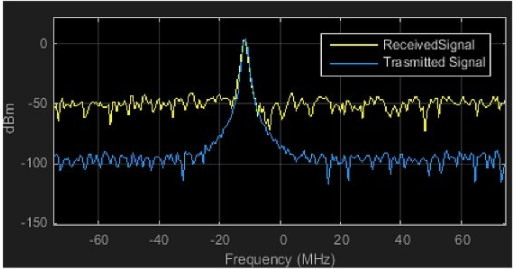
在理想条件(无噪声和失真)下运行的第一个模拟表明,可以正确检测所有使用中的目标的速度和位置。该仿真验证了测试环境和 DSP 算法。对于添加了收发器非线性和噪声的后续仿真,雷达会偏离理想行为,并且在距离较远时无法检测到汽车。
在增加混频器的隔离度和功率放大器的增益后,雷达系统扩大了探测范围,仿真再次正确估计了目标速度和范围。
有必要仔细权衡不同级的增益,以避免接收器工作在饱和状态。该模型允许我们使用一组不同的参数进行模拟。它还帮助我们为雷达实施选择合适的组件并验证它们对雷达性能的影响。
结论
本文介绍了使用基于 MATLAB 的工具链对用于汽车主动安全应用的完整 FMCW 雷达系统进行建模和仿真。建议的工作流程使我们能够在完整的系统级模型中模拟射频组件,包括数字信号处理算法。这种方法减少了雷达开发所需的时间和系统测试的复杂性,从而降低了开发周期的成本。
作者:John Zhao,Marco Roggero,Giorgia Zucchelli
审核编辑:郭婷
-
dsp
+关注
关注
561文章
8299浏览量
369606 -
matlab
+关注
关注
189文章
3034浏览量
239813 -
自动驾驶
+关注
关注
795文章
15097浏览量
182245
发布评论请先 登录
4D点云加持,FMCW激光雷达助力自动驾驶更安全可靠

调频连续波(FMCW)为什么是自动驾驶激光雷达的未来?

FMCW和ToF激光雷达,哪种更适合自动驾驶?
AWR1642:77/79GHz FMCW雷达传感器的卓越之选
探索AWR1443:77/79GHz FMCW雷达传感器的卓越性能与应用
AWR1843:77 - 79GHz单芯片FMCW雷达传感器深度解析
【科研动态】新一代集成光子FMCW激光雷达光源的设计框架与性能权衡

从原理到量产:FMCW激光雷达的核心技术体系与突破方向

IWR2944:76 - 81GHz单芯片FMCW雷达传感器的卓越之选
硅光加持下的感知革命:FMCW 激光雷达技术全景解读
全球体积最小4D FMCW激光雷达亮相!

利用matlab和FPGA产生FMCW波

洛微科技携4D FMCW激光雷达与3D感知方案闪耀光博会,引领行业新趋势

风随人动,无感智联:飞睿智能24G雷达模组重塑智能风扇体验




评论