 焦平面开关阵列及其优势
焦平面开关阵列及其优势

智能化和自动化是未来机器发展的一大趋势。机器要自主感知周边环境并与之交互,离不开各种三维传感器。
激光雷达利用光波进行三维测量,可以实现较高的分辨率,相比其它三维传感器具有独特的优势,因此也在无人驾驶汽车、机器人、无人机、消费电子产品等领域得到了广泛的应用。
激光雷达的技术方案多种多样,但目前中长距离的激光雷达大部分使用扫描光束的方案,即发出一束或几束准直激光,每次测量到物体上一个或几个点的距离,再依次改变发出光的方向扫描整个视场。
传统激光雷达一般使用机械旋转的方式进行光束扫描,这使得大部分激光雷达产品仍有体积大、成本高等不足。小型化和集成化是激光雷达的发展方向,如果能在芯片上实现固态激光雷达,将极大地降低激光雷达的功耗和成本,提高可靠性。
光束扫描器件的集成化是其中的一大技术难点。学界和业界近年来主要提出了两种集成光束扫描方案,即光学相控阵和焦平面开关阵列。
焦平面开关阵列具有控制简单,可扩展性强,容易实现二维阵列等优势。受限于干涉式硅光开关的功耗和尺寸,已有文献报道中最大的焦平面开关阵列像素数仅为 512,与实用激光雷达的像素数要求有很大差距。
近日,加州大学伯克利分校 吴明强 教授课题组利用独特的微机电系统光开关,实现了 16384 像素的大规模焦平面开关阵列,并展示了该芯片作为光束扫描器件实现的激光雷达。
值得一提的是,英特尔于2021年12月宣布成立集成光子学研究中心,汇集了世界知名的光子学和电路的研究人员,其目标是为下一个十年的计算互连铺平道路。吴教授是参与该研究中心的 7 名研究人员之一。
该团队在 1 cm² 的硅光芯片上集成了 128x128 个微机电系统光开关和天线阵列,可将激光雷达光束在 70°x70° 的范围内 16384 个不同方向之间快速扫描切换。
该成果以 A large-scale microelectromechanicalsystems-based silicon photonics LiDAR 为题发表在 Nature。加州大学伯克利分校的 张晓声 博士和 权暻睦 博士为论文的共同第一作者。
值得一提的是,张晓声 博士曾经是2016年清华本科生特奖得主(清华大学本科生的最高荣誉)。
焦平面开关阵列及其优势
该团队设计的焦平面开关阵列原理如图1所示,他们在硅光芯片上集成了一个二维光栅天线阵列,其中每个天线都通过光开关和光波导与输入端口连接。打开对应的光开关,可以控制输入芯片的光传导到某个指定的光栅天线并从该天线发出。利用类似照相机的光学原理,将这个硅光芯片放置在一个凸透镜的焦平面上,从不同位置天线发出的光经过透镜后会被转换为传向不同方向的准直光束,从而实现光束扫描。
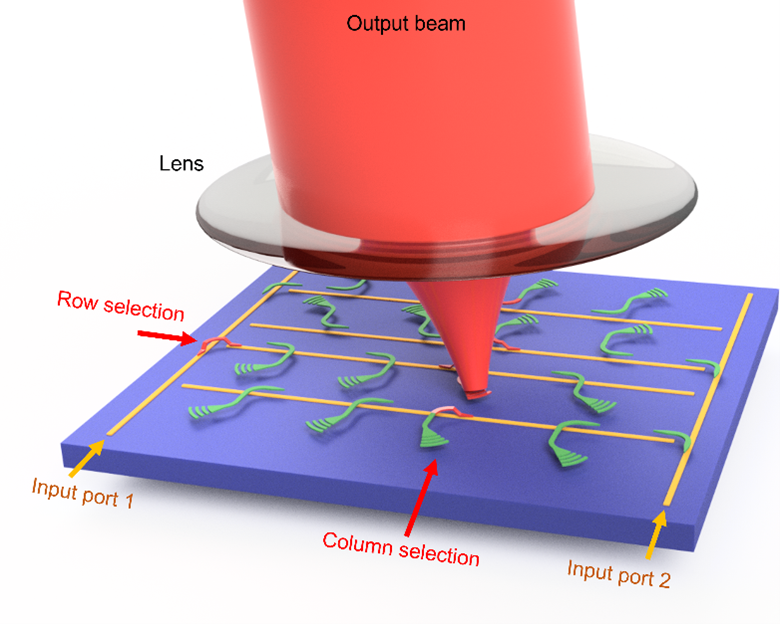
图1 焦平面开关阵列原理示意图
图源:张晓声,加州大学伯克利分校
焦平面开关阵列中的光开关仅需要数字化的开关控制,不需要复杂的模拟控制信号,并且二维阵列可以通过行列寻址方式减少控制信号数目,因此具有很好的可扩展性,便于实现大规模阵列。对于同一个阵列芯片,使用不同焦距和孔径的透镜(类似相机更换镜头),可以灵活改变光束扫描的范围、分辨率等参数以适应不同的应用场景。
微机电系统光开关
该阵列中使用的微机电系统光开关工作原理如图2所示。每个光栅天线的输入端口(图中绿色)由一个微机电系统致动器控制,可以在上下两个位置间切换。在开关关断状态,光栅天线输入端口处于上层位置,远离在硅片上的波导(图中黄色),不影响波导中光的传播。当开关处于打开状态,光栅天线输入端口处于下层位置,靠近硅片上的波导,这时在波导中传播的光就会被耦合到光栅天线中。这种微机电系统光开关具有面积小、损耗低、开关速度快等优势,特别适用于大规模阵列。
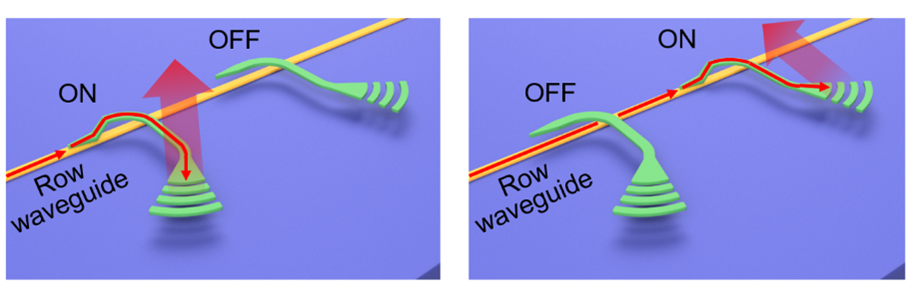
图2 微机电系统光开关工作原理
图源:张晓声,加州大学伯克利分校
该团队设计加工的 128x128 焦平面开关阵列如图3所示。其使用的微纳加工工艺与现有 CMOS 工艺兼容,可以实现大规模量产。
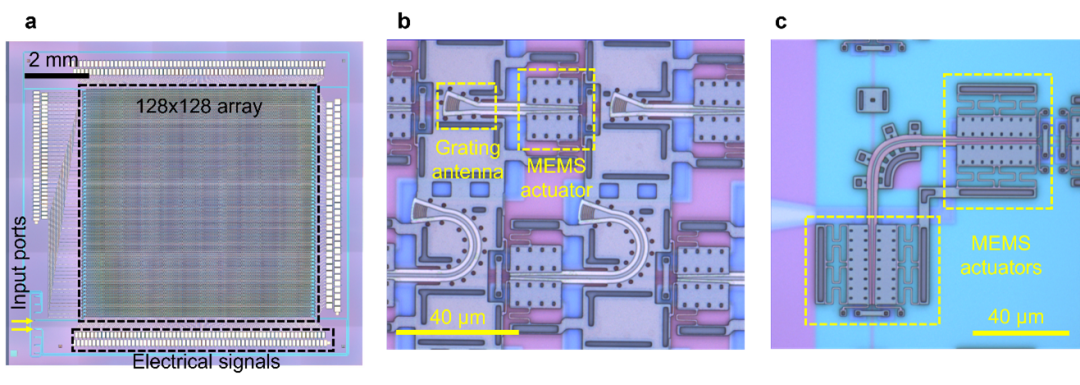
图3 128x128焦平面开关阵列的显微镜照片(a),及光栅天线和微机电系统光开关的放大照片(b, c)
图源:张晓声,加州大学伯克利分校
大规模固态激光雷达
论文作者将 128x128 焦平面开关阵列与调频连续波测距系统结合,演示了一个激光雷达系统,在实验中验证了 10 米测距范围的三维成像,测得的三维点云如图4所示。实验中得到的光束扫描范围和测量分辨率与设计值相符。
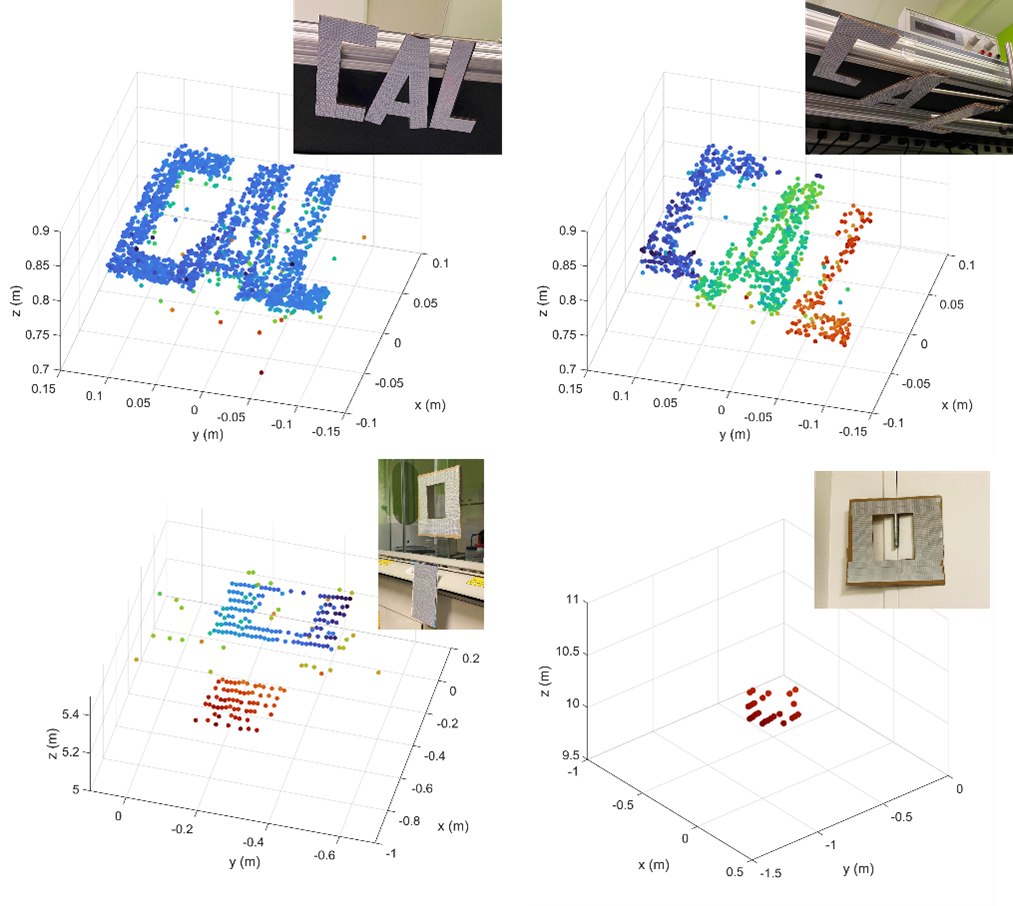
图4 激光雷达测得的三维点云和对应实物照片
图源:张晓声,加州大学伯克利分校
未来展望
要进一步提高焦平面开关阵列的像素数、分辨率和扫描范围以更好地适应激光雷达系统的需求,需要在芯片上集成更多数量的光开关和天线,并且缩小单元尺寸。该研究团队指出,通过进一步优化微机电系统光开关的设计,有望将单元尺寸缩小到 10 微米,进而在 1 cm² 的芯片上集成 1000x1000 像素的固态激光雷达,并实现优于0.1°的扫描分辨率。
未来大规模固态激光雷达的实现,或将极大地扩展激光雷达三维传感器的应用场景和适用范围,使人们可以更方便地获取三维信息,智能机器可以更精确地感知周围环境,为生产生活提供更大的便利。
审核编辑 :李倩
-
传感器
+关注
关注
2578文章
55811浏览量
795414 -
芯片
+关注
关注
463文章
54632浏览量
470920 -
激光雷达
+关注
关注
983文章
4595浏览量
197406
原文标题:Nature | 指尖大小的激光雷达芯片
文章出处:【微信号:WW_CGQJS,微信公众号:传感器技术】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
[FRED] FRED案例:矩形微透镜阵列
[VirtualLab] 畸变分析器
光谱共焦位移传感器最新应用案例大汇总

海伯森线/点光谱共焦传感器驱动多领域应用

[VirtualLab] 激光引导无焦系统的分析与设计
[VirtualLab] 二维叉形光栅产生涡旋光阵列
[VirtualLab] 高数值孔径物镜焦斑分析
开关电源平面变压器的技术特性和制作注意事项

低成本设计利器:TMAG5233平面霍尔效应开关解析
探索TMAG5133:低功耗平面高灵敏度霍尔效应开关的卓越性能
红外焦平面探测器核心指标NETD介绍
清华大学在分焦面超像素阵列光刻制造领域取得新进展
红外焦平面探测器核心指标:像元尺寸
平面以太网配线架的优点有哪些




评论