 PID整定相关的专业知识讲解
PID整定相关的专业知识讲解

如何获得PID控制器的最佳参数是很多仪表工还没真正掌握的技能,为了方便大家深入了解PID整定,在本文整理PID整定相关的专业知识供大家学习。
1、PID整定参数
这三个字母是什么意思?它们如何影响你的工厂行为?
PID是比例、积分和导数的首字母缩写。这些参数可以单独或集体使用、调整和控制。例如,您可以使用P控制器、PI控制器或PID控制器。每个参数都可以单独调整整定和控制,每个参数都可以用于特定目的。
PID参数表示为通用PID控制算法或ISA算法的参数:

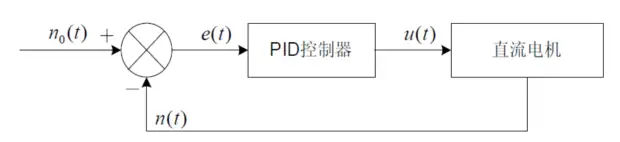
u(t)为PID控制器输出;u0为初始PID控制器输出;Kc为总增益;TI为积分时间或重置时间;TD为微分时间;e(t)为设定值和过程值得偏差
1.1 什么是PID整定参数
常规PID回路由三项组成:
①偏差或PV的比例作用
②偏差的积分作用
③偏差或PV的微分作用
选择正确的方程和最佳参数值是实现最佳整定的本质。
1.2 PID参数
①比例参数(P)描述
P作用与偏差或PV成正比。偏差(或PV)乘以比例增益并添加到控制器输出。P动作使输出朝正确方向“踢”。如果偏差值为零,则P动作为零。这意味着只有P动作的控制器需要非零偏差才能有非零输出。因此,仅使用P控制不可能实现精确跟踪。
②积分参数(I)描述
考虑PV和SP之间的偏差随时间的变化曲线。在数学中,偏差的“积分”可以解释为曲线和x轴之间以及y轴和当前时刻之间的曲面。每走一步,曲面都会向右延伸一点。如果此时偏差为零,则曲面不会增加,积分保持不变。
如果偏差为正,偏差曲线下方的曲面将增加,从而产生更高的控制器输出。当偏差变为负值时,I动作将减小。
通常情况下,与比例动作相比,I动作的动作要慢得多。然而,它最终会使偏差为零,这是比例作用所不能做到的。所以基本上,积分动作会回顾过去,检查偏差是否达到设定值。如果不是,它会作用于输出。它将操纵方向盘,直到你朝着预定的方向前进。
③微分参数(D)描述
积分不可能预测偏差的行为。微分作用通过预测偏差的未来行为来解决这个问题。所以,微分作用就是偏差的变化。它会根据偏差的变化向输出添加一个贡献。当偏差为正,但开始减少D动作时,它将降低控制器的输出。是制动器试图避免超调。
它减少了其他两个动作引起的振荡。它可以将控制器加速到您想要达到的设定值。
它减少了其他两个动作引起的振荡。它可以将控制器加速到您想要达到的设定值。然而,微分作用在PID调节中并不常用。问题是它会放大噪音。如果偏差信号非常嘈杂,PID控制器输出往往会大幅振荡。这可能会对泵和阀门等设备的使用寿命产生负面影响。
2、什么是PID整定
PID控制是一种通用的控制方法,也是自动化领域的一项工作:99%的自动化控制回路都是PID。在开始研究方法和算法之前,有必要知道要采取哪些PID整定步骤以及为什么要采取这些步骤。因此,您将能够充分利用PID整定,提高工厂性能。
2.1 PID整定是什么意思?
PID整定是指根据所用PID算法、开环过程行为和所需闭环行为的工程规范来确定PID参数的工作流程。
最优PID整定
高效地找到理想的P、I和D参数集就是我们所说的最优PID整定。在搜索参数的大范围内,只有一组能够获得最佳性能。根据您使用的PID方法,计算出的参数可能更接近或更远离此最佳设置。
过程行为
在PID整定中,过程行为是关键。只有在掌握正确的过程行为时,才能执行最佳整定。大多数方法将过程简化为非常简单的一阶行为,尽管有许多过程不能用这些简单的模型来描述。例如,蒸汽锅炉汽包、过热器、长延迟过程、(给水)间歇反应器和液位控制器。
工程规范
最后,您不应该忘记所需过程行为的工程规范。当设定值跟踪是关键时,将其作为最优性的标准。当干扰抑制是关键时,关注这一点。当两者都需要时,尝试使用前馈。如果不允许超调(由于产品质量下降),则整定控制器以避免超调,或者如果实际工厂确实如此,则整定控制器以在非常宽的工作范围内工作。
换句话说,PID整定意味着控制回路有一个特定的目标,通过使用正确的P、I和D参数可以实现该目标。因此,您将实现最佳的工厂优化。
2.2 为什么进行PID整定
为了获得所需的闭环控制,PID整定是必要的。例如,如果想要控制温度,则需要整定PID控制器,以将温度保持在设定值。
整定的最低要求是,过程可以在闭环中稳定运行。
再进一步,PID整定将通过减少振荡来控制设备。例如,这将导致更少的警报和更少的操作干预。
再往前走一步,你就会明白,由于优化了PID整定,工厂效率可以提高,比能耗可以降低,稳定性可以提高,警报和操作员干预的数量可以降到最低。
2.3 整定的关键
PID整定可以带来很多好处。当您花时间将PID参数整定到最佳值时,可以获得数周、数小时甚至数分钟的回报。按照以下关键步骤第一次PID整定:
①了解你想要控制的过程的行为,例如通过使用(多)阶跃测试。
②使用正确的系统辨识方法。
③检查DCS PID算法,并在适当时进行更改
④制作自己的工程愿望清单,在其中选择最佳跟踪和/或最佳干扰抑制。不要忘记鲁棒性和高频增益。
④计算最佳参数,实施这些参数,并在实际设备上检查结果。
⑤跟踪并记录您所做的更改。
3、PID整定方法
选择正确的整定方法以运行稳定的生产过程
如何快速有效地整定PID控制器?这是一个让许多工程师感到困惑的问题。
尽管PID整定的概念很简单,但支持PID控制的数学基础却很复杂。一旦为问题选择了最佳控制器配置,就必须整定参数。实现最佳性能需要为P、I和D选择一组理想的数值。
概括地说,有三种方法可以确定这些设置的最佳组合:启发式整定、基于规则的整定和基于模型的整定。每种方法都有其优缺点。尽管许多人可能认为试凑法是免费的,但它们往往非常昂贵。
3.1 什么是启发式整定
启发式整定方法是一种遵循一般规则以获得近似或定性结果的方法。世界上大多数PID回路都采用这种方法进行整定,无论是好是坏。试凑法是启发式整定的一个例子。
试凑法
试凑法是一种相对简单的方法,一旦你对PID参数有了清晰的了解。从比例到积分再到微分,它在整个系统中循序渐进。通常从现有的一组参数开始,从中执行小调整整定以改善响应。对于新的PID回路,您可以从粗略而安全的初始猜测开始。
基本上,人们认为:
①引入P-动作以提高响应速度。过度的P作用会导致振荡。
②引入I-动作以获得所需的稳态响应。缺点是较长时间内振荡响应较高。
③引入D-作用是为了阻尼。缺点是高频振荡的可能性更大,加上对噪声的敏感性。
基于规则的PID整定方法假定某个过程响应,以获得简单的数学公式,从而实现PID控制器的调节。过程特性可以通过简单的实验得出,并用于计算PID参数。
请注意,此类整定方法对假设过程响应的差异(例如,一阶线性延迟模型)非常敏感。特别是,与假定的过程时滞的较大偏差将极大地降低实际PID性能。此外,定义自己控制目标的可能性非常有限或不存在。
Lambda整定方法
Lambda整定方法的名字来源于希腊字母Lambda(λ)。它规定了控制器允许在稳定时间上花费的时间。Lambda整定方法假设的响应与Ziegler-Nichols方法相同。
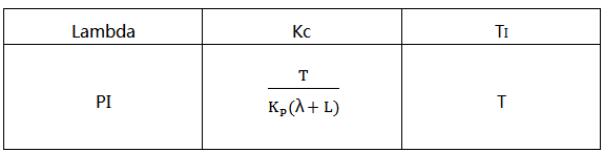
典型λ=max(L,T)(非常稳定)减少λ获得更快响应。
3.3 什么是基于模型的整定?
基于模型的整定或基于优化的PID整定允许您使用系统模型以最佳方式获得P、I和D参数。考虑了闭环行为的工程规范。
基于模型的PID整定是一种方法,允许您根据结构化整定过程进行工作,该过程考虑了您的过程行为和控制需求。启发式和基于规则的调整需要一个迭代过程。ZieglerNichols等方法在许多(简单)情况下给出了合理的结果,但无法提供与基于模型的PID调节相同的结构化过程和生产结果。
基于模型的调整方法可能看起来更耗时,但一旦为PID回路设置了正确的参数,您就会立即看到好处。这些好处将长期存在。在第一次将PID控制器设置正确后,您不必再次查看它,除非过程中发生了变化。
-
控制器
+关注
关注
114文章
17879浏览量
195159 -
PID
+关注
关注
38文章
1505浏览量
91907 -
模型
+关注
关注
1文章
3819浏览量
52274
发布评论请先 登录
《TEC 温控为什么总是超调?手把手调 PID》
高低温试验台PID参数自整定技术:如何实现无超调控温?

破解柔性生产难题:知识驱动具身智能工业机器人的实战应用指南


变频器pid怎么启用

PID控制的算法
讲解C语言代码的实现过程
C语言的PID算法
【射频大讲堂】中星联华走进高校系列-南京航空航天大学站

CW32电机控制基础——PID控制原理



评论