 运动控制+机器视觉Demo软件框架(三)视觉纠偏
运动控制+机器视觉Demo软件框架(三)视觉纠偏

内容回顾
回顾之前课程我们对运动控制 +机器视觉例程Demo的相机标定和形状匹配两大模块进行了大致的介绍。目前我们已经基本上讲完了所有功能模块。接下本期课程讲解一下如何通过该例程进行配方编辑实现视觉纠偏的连续插补功能的工艺文件,方便大家去理解该例程。
01开发环境介绍
一、硬件平台

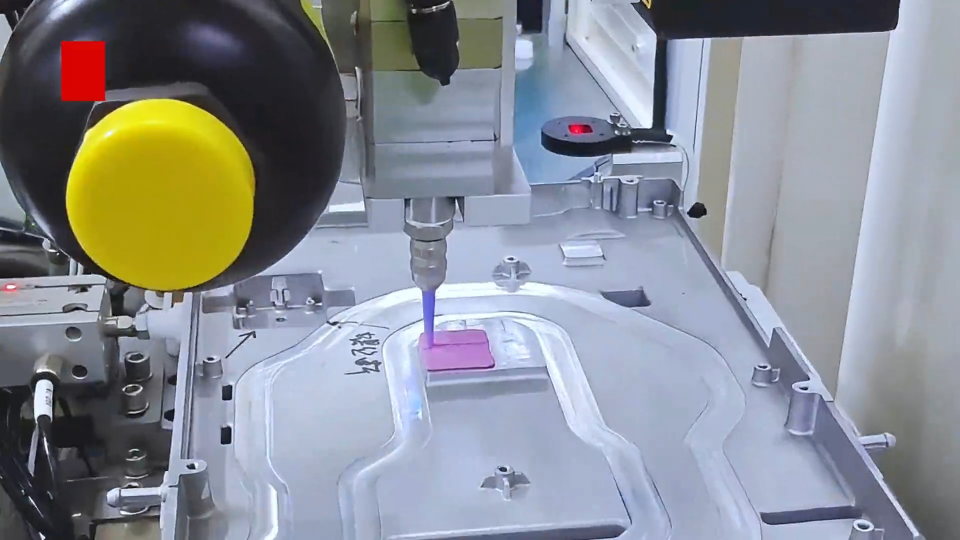
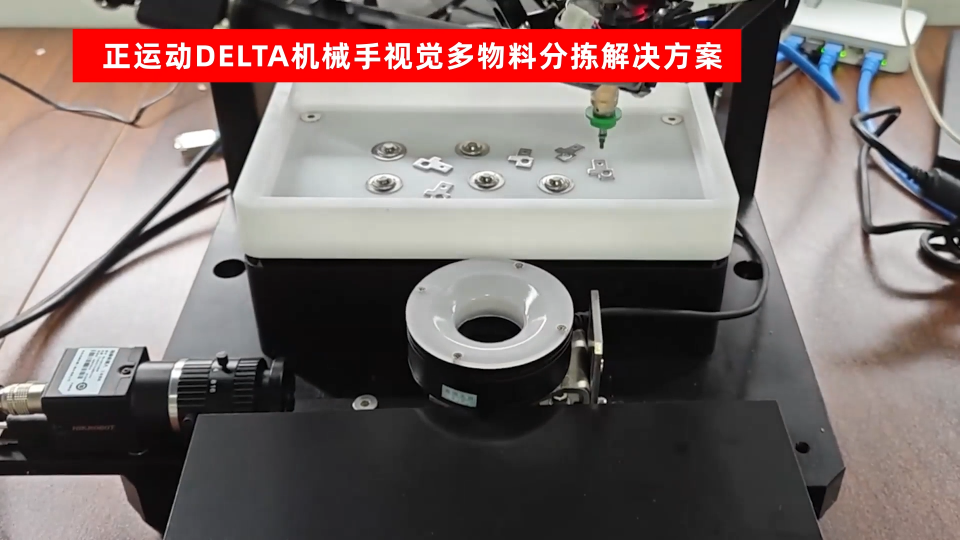
运动控制机器视觉实训平台,包括VPLC532视觉控制器、4个步进电机、相机、光源、光源控制器、带HDMI接口的工业显示屏等相关硬件配置。
二、软件平台
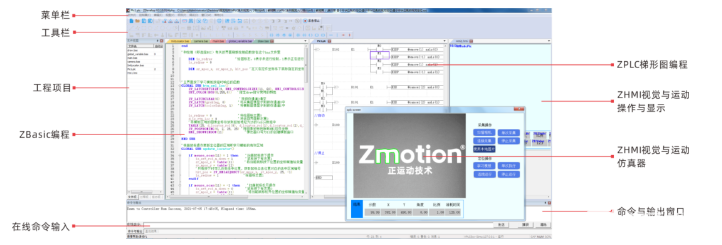
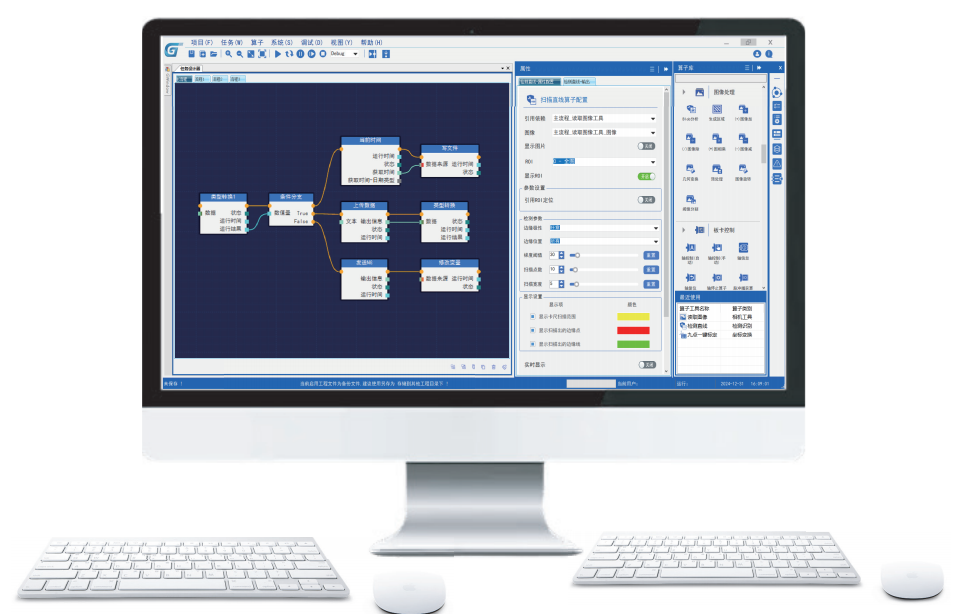
ZDevelop 是正运动技术ZMoiton系列运动控制器的PC端程序开发调试与诊断软件,通过它用户能够直接对控制器进行程序编辑与配置,快速开发应用、实时诊断系统运行参数以及对运动控制。
ZDevelop支持三种编程方式,分别为ZBasic、ZPLC梯形图、ZHMI组态,使用ZDevelop软件编写的程序可以下载到正运动控制器里,也可以下载到仿真器在PC平台仿真运行。
02设置视觉纠偏和连续插补操作
一、配置系统参数
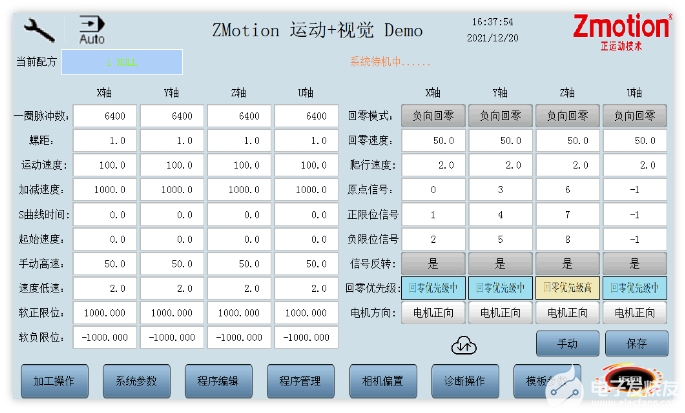
点击《系统参数》进入系统参数配置界面,按照机台的实际情况进行以上参数的设置,然后点击《保存》即可完成配置。
二、计算相机中心和加工中心的偏移量

点击《相机偏置》进入相机偏置界面。通过手动运动先使相机中心对准机台上的某点如A点,然后点击《记录相机中心坐标》。
接着继续通过手动运动使加工中心对准机台是的A点,然后点击《记录加工中心坐标》。
最后点击《计算偏移量》完成相机中心和加工中心的偏移量的计算。其中计算出来的偏移量是掉电保存的,其他的坐标数据没有保存。
三、相机标定
先在相机偏置界面点击《手动》打开手动运动窗口,并点击《开始连续采集》开启采集模式,然后手动运动使标定的Mark点移动的相机视野的中心位置。
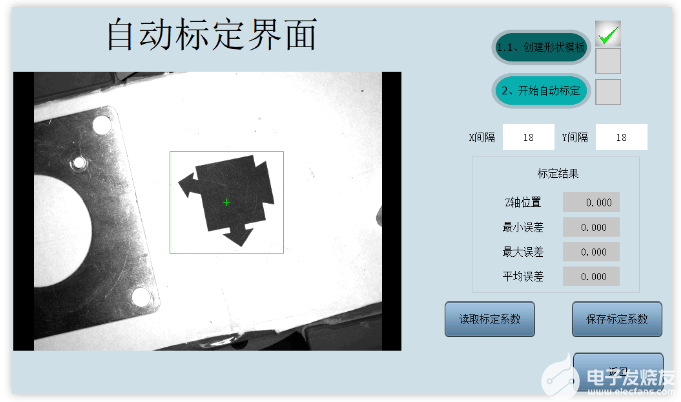
接着点击《标定》进入相机标定界面,点击《1.0、显示ROI》调出矩形ROI。然后通过鼠标移动ROI将Mark点框选起来,之后点击《1.1、创建形状模板》即可完成标定模板创建。
最后设置好X、Y的运动间隔后点击《2、开始标定》,等待标定OK的窗口弹出 后再点击《保存标定系数》完成标定系数的保存。
四、打开一个空的程序文件

点击《程序管理》进入程序管理界面,然后选择空的程序文件,再通过鼠标长按红色框选区域的按钮500ms后松开,即可打开该程序文件并自动进入程序编辑界面。
五、添加第1行指令--视觉纠偏
第一步
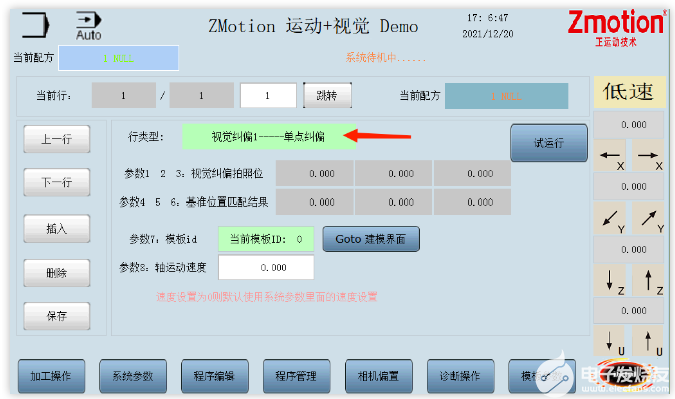
第二步
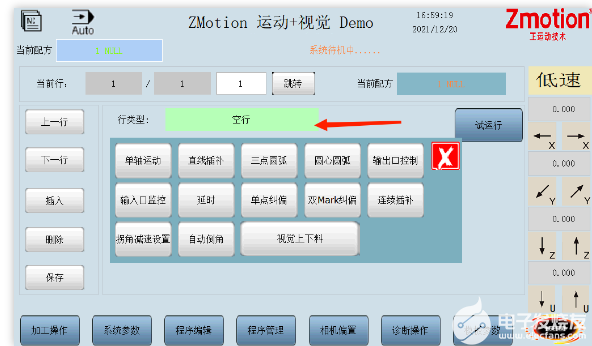
点击《空行》位置,弹出当前行指令选择窗口,选择单点纠偏。然后点击《Goto建模界面》,然后手动运动到视觉纠偏拍照位位置,进行视觉纠偏模板的创建。
六、添加第2行指令--开启连续插补

点击《下一行》进入下一行的编辑,点击《空行》位置,弹出当前行指令选择窗口,选择连续插补,并设置连续插补功能为ON。
七、添加程序的其它运动指令

点击《下一行》进入下一行的编辑,点击《空行》位置,弹出指令选择窗口,选择合适的运动指令完成连续插补轨迹的示教。
八、保存程序文件

完成程序文件的编辑后长按《保存》按钮 0.5S ,完成程序文件的保存。
九、程序文件的运行

返回加工操作界面,进行系统的复位。完成系统复位后点击启动按钮即可确定该程序文件。
本次,正运动技术运动控制+机器视觉Demo软件框架(三):视觉纠偏+连续插补的配方编辑,就分享到这里。
审核编辑:符乾江
-
运动控制器
+关注
关注
2文章
497浏览量
26189 -
运动控制卡
+关注
关注
7文章
135浏览量
16178
发布评论请先 登录
慕尼黑上海电子设备展,正运动机器视觉运动控制一体机应用预览(三)

机器视觉镜头如何发现深海沉船




【团购】独家全套珍藏!龙哥LabVIEW视觉深度学习实战课(11大系列课程,共5000+分钟)
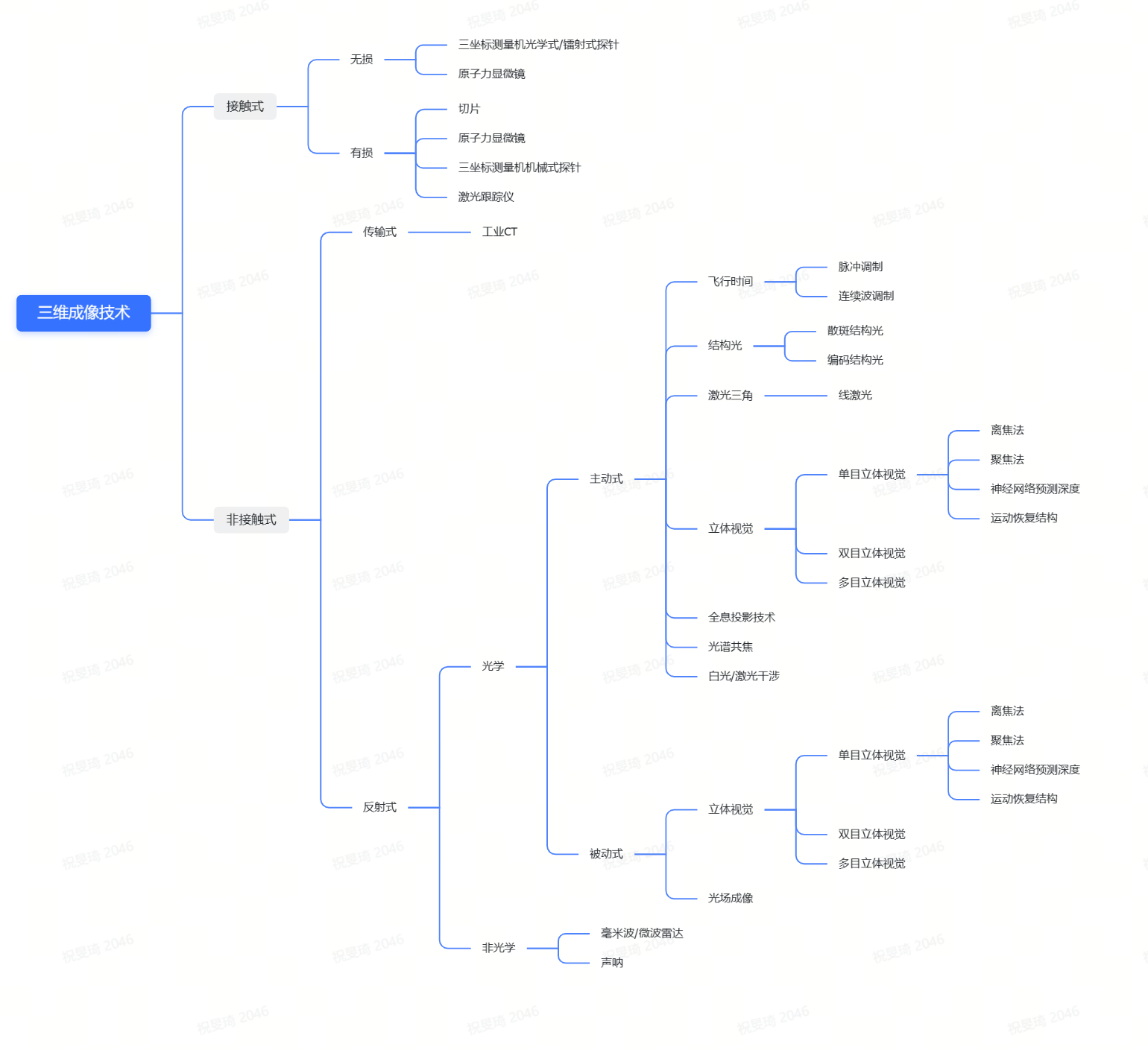
机器视觉三维成像技术简介(一)
机器视觉检测PIN针
主流机器视觉软件开发平台介绍及对比?



评论