 可以到处钻的蛇形机器人在海底执行各种工作任务
可以到处钻的蛇形机器人在海底执行各种工作任务

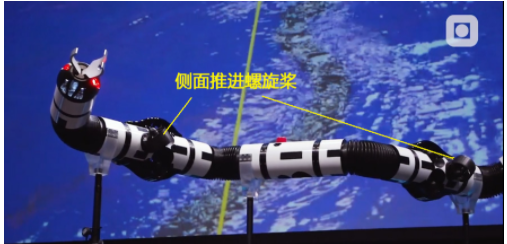
蛇形机器人可以在海底执行各种工作任务,像蛇一样的灵活摆动,头部还具备可替换适应各种工作用途的蛇头,比如钳子和毛刷等。同时还具有视觉识别感知等功能,可勘探海底管道或各种海底设备中的可能会出现的隐患。

可替换不同功能的蛇头
那么在蛇形机器人的两侧,装有4套螺旋桨推进系统,蛇身在摆动转方向的同时,给予蛇形机器人更加快速的推进力和更灵活的游动。
既然用到螺旋桨推进器,必然会用到电机动力桨,在这种应用场合的前提下,轴向磁场电机应该是个不错的动力选择方案,轴向磁场电机具有轴向尺寸小,扭矩大的特点,在螺旋桨和机器人等动力应用具有很好的优势特性。
就比如目前我们开发的轴向磁场螺旋桨电机,就适合有螺旋桨场合的多种应用。
那么这种蛇形机器人类型只是在海底设备检测上应用吗?相信在原理样机完成并可以满足探测、监控、维修和清洁等实际功能后会开发并能适应更多的行业应用。
编辑:黄飞
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
213文章
31442浏览量
223652 -
视觉识别
+关注
关注
3文章
111浏览量
17389 -
蛇形机器人
+关注
关注
0文章
7浏览量
6271
发布评论请先 登录
相关推荐
热点推荐
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
机器人在每毫秒都能“感知”到自己被推、拉或碰到东西。
正是这种连续、精准的力觉反馈,让机器人实现了三大关键能力:
1. 柔顺控制:像人手一样“顺着来”
传统机器人遇到意外阻力会硬顶,容易损坏零件或伤人
发表于 04-17 17:27
小型自重构机器人能不能帮忙做一个?
最低、能直接动手做**的版本。
---
# 一、你能做出的效果(超酷)
这种叫 **模块化自重构机器人(微型蛇形/组合式)**
你做出来可以:
- 像小蛇一样**爬行**
- 多个模块**自动
发表于 02-21 19:24
从概念到落地:灵巧手为何是人形机器人产业化的决胜环节?
人形机器人被誉为下一代通用型机器人平台,其终极目标是能够无缝接入人类环境,使用人类工具,执行多样化任务。然而,能否“灵巧”地操作物体,成为区分概念Demo与实用产品的关键。灵巧手的性能
如何利用NVIDIA Cosmos Cookbook提升机器人操作能力
机器人操控系统在进入动态现实环境时,难以应对持续变化的物体、光照条件及接触动力学。此外,仿真与现实之间的差距,以及未经过优化的抓手或工具,通常限制了机器人在多样化任务中的泛化能力、长视距任务
柔顺与施力控制:协作机器人在复杂任务中的核心优势
”的跨越传统的位置控制模式下,机器人严格按预设路径运动,适用于规则、结构化的场景。而在面对不规则曲面或需实时响应的任务时,柔顺控制与施力控制展现出显著优势:1.动态路

全自动装车机器人在河南玉米装车中的应用
突出。随着科技的进步,全自动装车机器人逐渐应用于玉米装车环节,展现出显著的优势,为河南省的农业生产带来了变化。 全自动装车机器人在河南玉米装车中的应用,首先体现在效率的大幅题升上。传统的装车方式需要多名工
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
任务并行处理,是服务机器人开发的理想高性能平台。
RK3576:机器人领域的性能突破在机器人技术飞速发展的今天,如何让机器人"看得
发表于 10-29 16:41
机器人竞技幕后:磁传感器芯片激活 “精准感知力”
2025 世界人形机器人运动会于 8 月 17 日圆满收官,赛场上机器人在跑步、跳跃、抓取等项目中的精彩表现,背后是运动控制、环境感知等技术的迭代升级。而在这些技术中,磁传感器芯片凭借独特优势,成为
发表于 08-26 10:02
利用NVIDIA Isaac Lab训练工业机器人齿轮装配任务
多部件装配在制造、汽车、航空航天、电子、医疗设备等绝大多数行业中都扮演着关键角色。虽然应用广泛,但是机器人装配仍是一项极具挑战性的任务。这类任务涉及复杂的交互,机器人必须通过持续的物理
明远智睿SSD2351开发板:语音机器人领域的变革力量
的四核1.4GHz处理器具备强劲的运算性能,能够高效处理语音机器人运行过程中的复杂任务。语音识别和合成需要大量的计算资源,该处理器可以快速对语音信号进行分析、处理和转换。在实时语音交互场景中,无论是
发表于 05-28 11:36
盘点#机器人开发平台
地瓜机器人RDK X5开发套件地瓜机器人RDK X5开发套件产品介绍 旭日5芯片10TOPs算力-电子发烧友网机器人开发套件 Kria KR260机器人开发套件 Kria KR260-
发表于 05-13 15:02
详细介绍机场智能指路机器人的工作原理
:机器人还会将自身传感器获取的环境信息与预先建立的机场高精度地图进行匹配。通过对比地图中的特征点和实际感知到的环境特征,进一步精确机器人在地图中的位置。同时,利用这种地图匹配方式,可以对定位结果进行实时
发表于 05-10 18:26
【「# ROS 2智能机器人开发实践」阅读体验】机器人入门的引路书
的快速开发的目的
ROS把功能分为一个个节点,节点之间用公用的通信接口连接
比如电机可以提供操控,转速监测,ipd控制等功能,方便各种情况调用
一个项目就是工作空间
一个功能包相当于一个功能,里面有多个
发表于 04-30 01:05



评论