 剖析单片机六自由度自动寻迹机械人的设计
剖析单片机六自由度自动寻迹机械人的设计

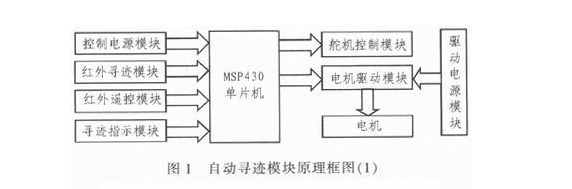
本设计中自动寻迹模块主要由单片机及其外同电路、红外寻迹电路、直流电机控制电路等组成。正常工作时,单片机循环检测红外寻迹电路输出信号,据此产生直流电机控制信号,当系统检测到工作方式发生改变时,系统进入相应方式。其原理框图如图1、图2所示。
1 系统原理
1.1 自动寻迹模块的系统原理
本设计中自动寻迹模块主要由单片机及其外同电路、红外寻迹电路、直流电机控制电路等组成。正常工作时,单片机循环检测红外寻迹电路输出信号,据此产生直流电机控制信号,当系统检测到工作方式发生改变时,系统进入相应方式。其原理框图如图1、图2所示。

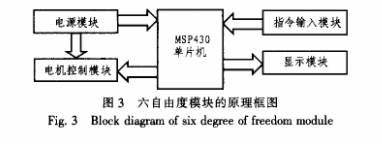
1.2 六自由度机械手模块的系统原理
系统的设计采用模块化的方法,将机械于划分为基座、手臂、手腕、手部4部分。控制器以MSP430单片机为主控制器,具体控制部分框图见图3。
2 系统设计
2.1 自动寻迹模块硬件设计
1)基本单片机系统
寻迹机器人系统的控制核心,一般情况下以MSP430单片机片内的基本硬件资源为主,有必要时再扩展部分外部器件。在本设计中需要完成的控制比较简单,以单片机片内的基本硬件资源完全可以实现,因此不需扩展。
2)放大信号电路
采用LM324控制,LM324是四运放集成电路,它采用14脚双列直插塑料封装,内部包含四组形式完全相同的运算放大器,除电源共用外,四组运放相互独立。
3)电动机驱动电路
所选用的电动机为普通的直流电机,在MSP430单片机的控制下,可接一个电机驱动芯片或者通过其他的一些原件可使电机转动。本系统为了设计简单,采用其他方式代替了电路驱动芯片。
2.2 六自由度机械手模块硬件设计
六自由度机械手是由6个伺服电机驱动的机器手臂。除了构成手臂的4个关节、手腕1个关节外,再加上手部的夹持,实现了1个机械手的机械结构。
该控制模块采用5 V直流电源分别为单片机和机械手臂的电机供电,电路包括手动复位电路、晶振电路、矩阵键盘、用以控制单片机转角的控制的独立键盘、伺服电机接入口,并可通过显示屏显示被选电机标识号和该电机转动的角度。
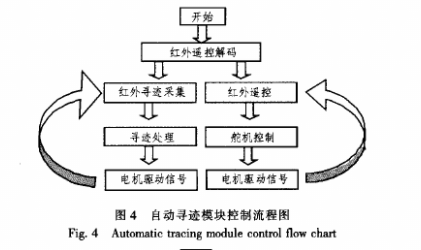
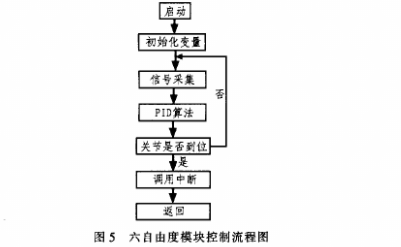
3 软件设计
本系统的软件设计面向硬件,选用C语言编程。最主要部分是单片机控制电机转动(包括正转反转)、时间的延迟和PID算法,具体的设计流程图见图4和图5。
4 系统调试
1)程序编完后,对代码仔细逐行检查。检查代码的错误,建立自己的代码检查表,对经常易错的地方进行检查。检查代码是否符合编程规范。
2)调试程序看是否能仿真,如果运行正常再将在编译器中调试好的程序烧写至单片机。
3)在接上电源时,观察整体电路是否按照预计设计的运作,电机是否正转,电机是否反转等。可根据电路的运行情况推测出程序出错的部分,修改程序后再经过编译器调试后烧到单片机,反复检测直到能工作完全正常。
5 结束语
本系统为单片机的寻迹机器人系统,主要应用单片机MSP430作为控制核心,直流电机、舵机、一体红外接收头等相结合的系统。这个系统软硬件设计简单,易于开发,严格控制各种元件的采购成本,所以价格低廉,安全可靠,操作方便。
编辑:jq
-
电路
+关注
关注
173文章
6088浏览量
178932 -
单片机
+关注
关注
6078文章
45593浏览量
673988 -
机械手
+关注
关注
7文章
362浏览量
31604
发布评论请先 登录
Renesas 7544 系列单片机:技术剖析与设计要点
深入剖析Renesas M16C/6S:一款高度集成的16位单片机
MC68HC908 系列单片机:技术剖析与应用指南
Infineon C161PI 16位单片机:设计与应用的深度剖析
瑞萨8位单片机740族:技术剖析与设计指南
复合机器人机械结构设计与创新:智能制造的前沿技术与发展趋势

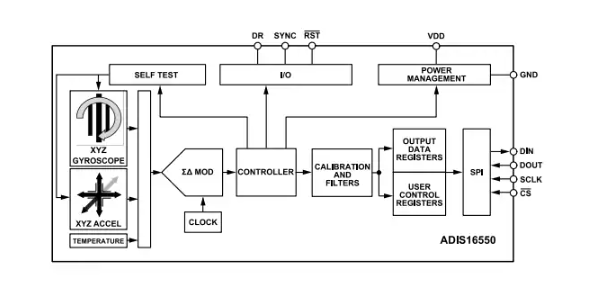
SCH16T-K01:高性能6自由度传感器的技术剖析与应用指南
人形机器人市场火爆!雷赛智能重磅推出“20自由度”灵巧手方案
多自由度云台控制系统赋能安防监控的智能巡检与目标锁定
不到万元!智元机器人高自由度灵巧手做到了

EtherCAT科普系列(17):EtherCAT技术在多自由度 3D 打印领域应用

单片机怎么驱动电机?
极海G32R501工业六轴机械臂参考方案释放工业4.0产业价值

十字形多自由度超声电机接触分析模型研究
Analog Devices Inc. ADIS16550六自由度惯性传感器数据手册



评论