 常见的动态规划题目
常见的动态规划题目

注:本文是BAT真题收录很值得大家花心思看完,看完会有收获。
前言
算法是面试大公司必考的项目,所以面试前准备好算法至关重要,今天整理的常见的动态规划题目,希望可以帮到大家。
要想学习其他绝世武功,要先打好基础。算法属于内功,则更为重要。
强盗抢劫
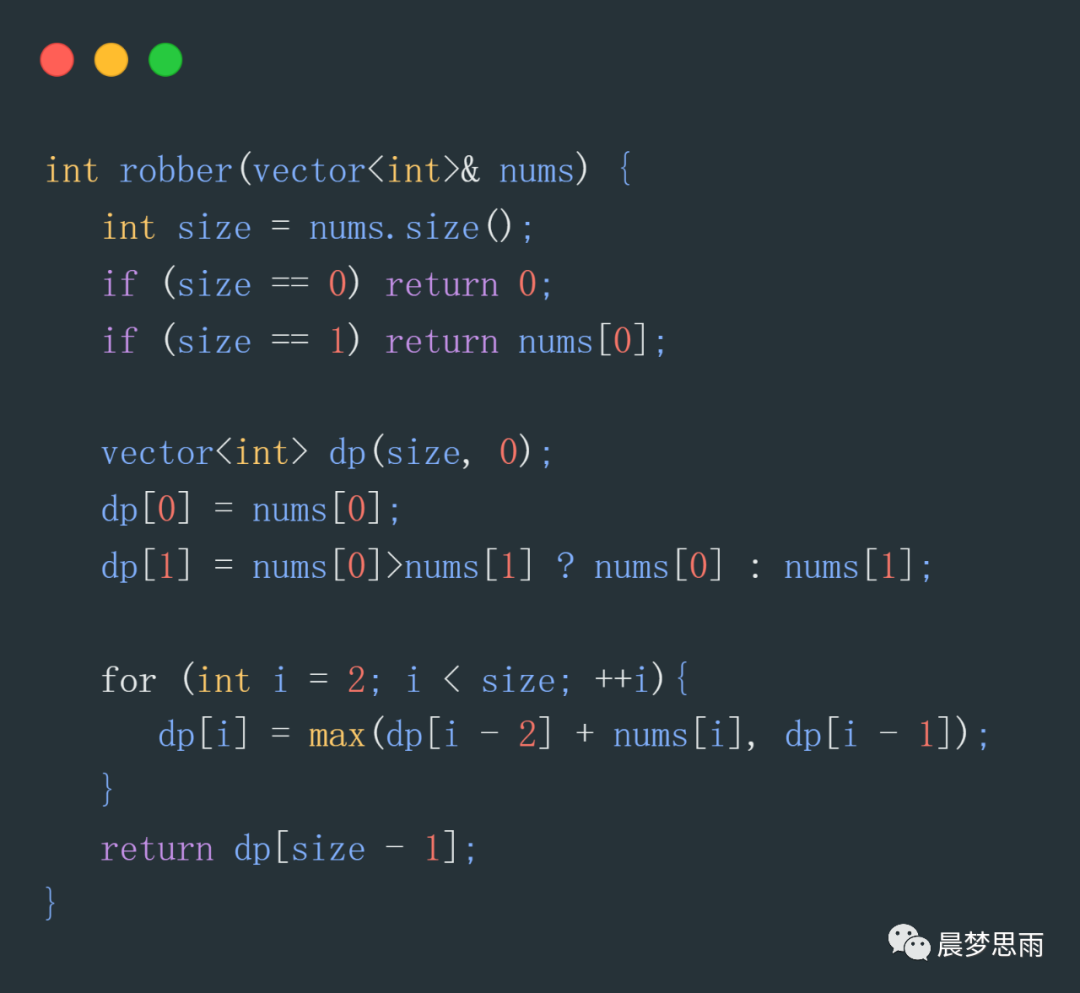
题目:强盗抢劫一排房间,每个房间都有钱,不能抢劫两个相邻的房间,要求抢的钱最多。数组如:[2,7,9,3,1]
思路:当输入房间数为0,1,2时,这个很好判断,当输入房间数字大于3时,就要用到动态规划了,方程是:
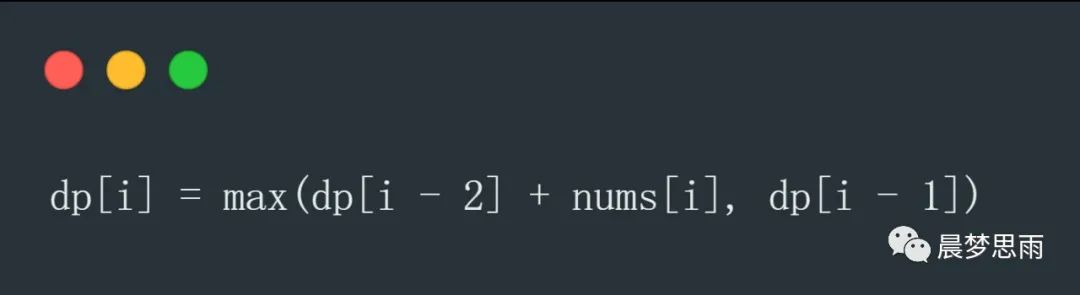
dp[i]是当抢到第i个数时,能抢到最大值,从局部最大值推到最终结果最大。
假如抢到第5个房间,那么第5个房间有二种情况,抢不和不被抢,因为只能隔房间。
如果抢到第4个房间,有个最大值;抢到第3个房间,有个最大值。
如果加上第3房间最大值,加上第5房间的最大值,大于抢到第4个房间时的最大时。那就抢3,5而不抢4,反而,就按抢4的策略。
这样从前往后推,最后的结果一定是最大的。
代码如下:
跳台阶
题目描述:有 N 阶楼梯,每次可上一阶或两阶,求有多少种上楼梯的方法
先来分析下这个问题:
当N=1时,这个很好理解,只能跨1步这一种了
当N=2时,你每次可以跨1步或2步,那就是走2步或走两个1步
当N=3时,因为你可以跨1步或2步,那你在台阶1或2都能行。要计算到台阶1有多少种走法,到台阶2有多少种走法,然后2种相加,依次逆推。
当N=4时,你在台阶2或3都能行,计算到台阶2有多少种走法,到台阶3有多少种走法,然后2者相加,依次逆推。
总结如下:你会发现,这是斐波拉切数列,使用递归出现重复计算问题,所以选择动态规划算法。
| 层数 | 公式 | 种数 |
| 1 | f(1)=1 | 1 |
| 2 | f(2)=2 | 2 |
| 3 | f(3)=f(1)+f(2) | 3 |
| 4 | f(4)=f(2)+f(3) | 5 |
第三层:3种(在第一层走2步或在第二层走1步)
第四层:5种(在第二层走2步或在第三层走1步)
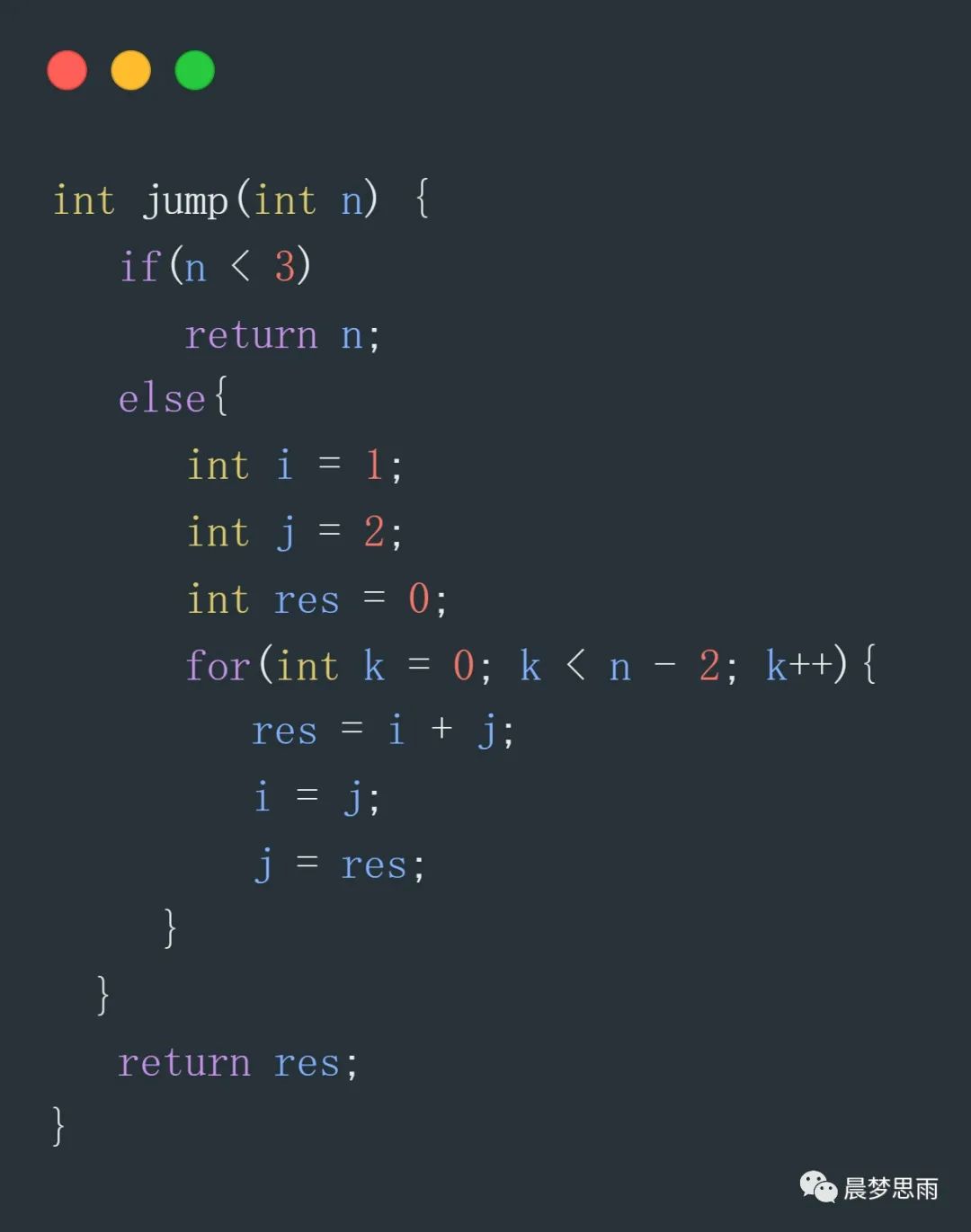
i,j首先赋边界值,res保存i+j的值,每次前进,i,j,res的值都会被赋到前面结果。
上面的算法是底向上,递归相当于自顶向下,避免了重复计算。
矩形最小路径和
题目:
给定一个,包含非负整数的 m x n 网格。请找出一条,从左上角到右下角的路径。使得路径上,所有数字总和为最小,每次只能向下,或者向右移动一步。
输入:[[1,3,1],
[1,5,1],
[4,2,1]]
输出: 7
解释: 因为路径 1→3→1→1→1 的总和最小。
先看动态方程:
| i值 | j值 | dp方程 |
| i>0 | j=0 | dp[i][0] = dp[i−1][0] + grid[i][0] |
| i=0 | j>0 | dp[0][j] = dp[0][j−1] + grid[0][j] |
| i>0 | j>0 | dp[i][j] = min(dp[i−1][j], dp[i][j−1]) + grid[i][j] |
说明:因为 i=0 和 j=0 是临界条件,所以要先求出来。当 i>0 和 j>0 时,看如上数组,5 可以由上方3,或者左方 1 走过来。
当走5的时候,要选取上方3对应的dp,与左方1 对应的dp进行比较,选择较小值累加,这样走出来的才是最小值。最后推出,到右下角的最小值。
代码如下:
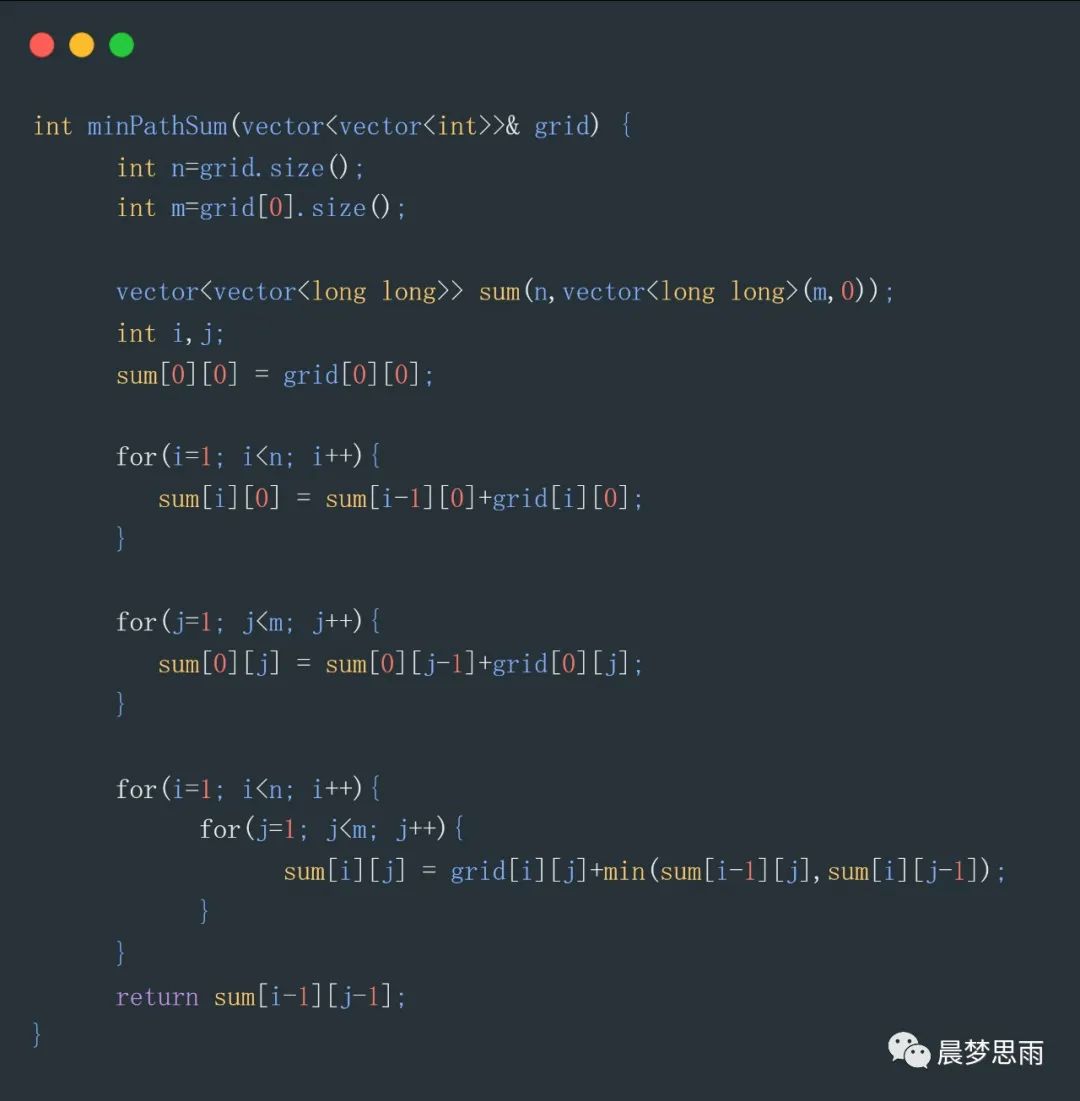
sum用来存储,从[0][0]到sum[i][j]路径的最小和,看看每次sum的变化,sum[1][1]=7意思是,从[0][0]到[1][1]路径最小和是7。
程序先把,第2行对应的sum都求出来,再把第2列对应的sum都求出来,最后求sum[2][2]就很容易了。
最后,sum[i-1][j-1]就是推出的最小值,上述代码就是dp方程的实现。
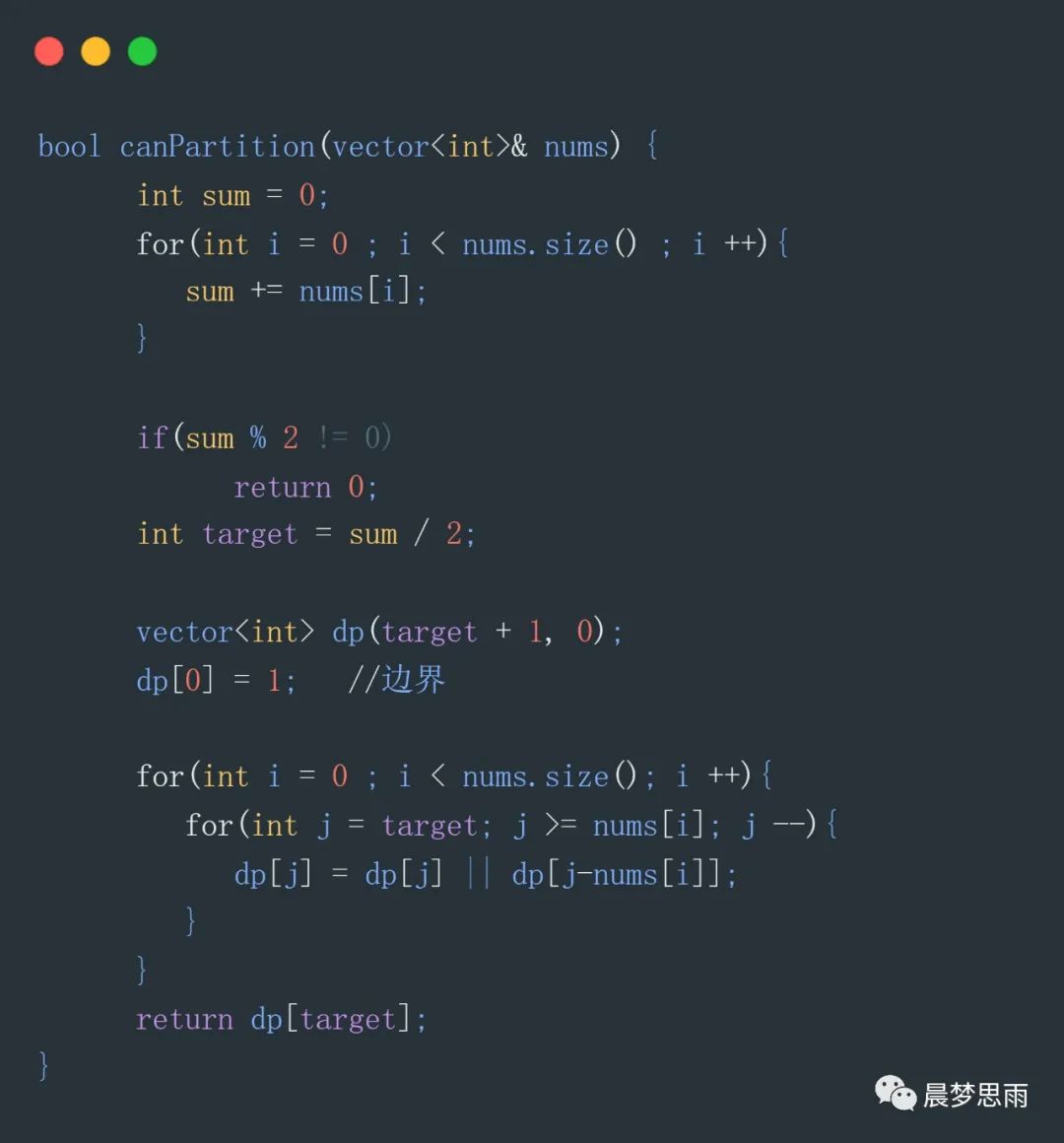
划分数组为两个相等的子集
题目:输入:[1, 5, 11, 5], 输出:[1, 5, 5]和[11]
思路是,相对数组中每个数求dp,最后就会找到dp[target]是否为true。
如果 dp[j - nums[i]] 为true的,说明可以组成 j-nums[i]这个数,再加上nums[i],就可以组成数字j。
当j = target是同样道理,要想找到dp[target]为true,就找到数组中,几个值的和为target时,对应下标的dp值为true,这样反推dp[target]为true。
代码如下:
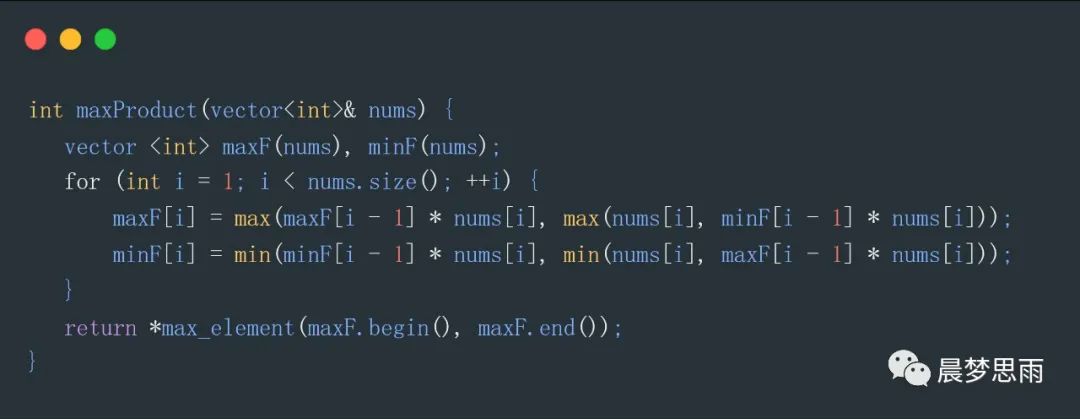
乘积最大连续子数组
题目:
输入一个整形数组,数组里有正数也有负数。数组中连续的一个,或多个整数组成一个子数组,每个子数组都有一个和。求所有子数组的和的最大值。
例如数组:arr[]={1, 2, 3, -2, 4, -3 } 最大子数组为 {1, 2, 3, -2, 4} 和为8。
思路:fmax(i) 表示,以第 i 个元素结尾的,乘积最大子数组的乘积,fmin(i) 表示,以第 i 个元素结尾的,乘积最小子数组的乘积。
这里分为最大和最小是因为数组可能存在负数,最大值乘以负数变成较小值,最小值乘以一个负数也可能变成最大值。
比较方程是:当前数乘以上一个最大值,当前值,当前数乘以上一个最小值。这三者比较,其中的最大值,就是我们要的最大值。
同样,每次也要把最小值计算出来,方式同上。
代码如下:
等差递减区间的个数
题目:求一个数组中等差递减区间个数,等差数列必须是连续的。
例子:A = [1, 2, 3, 4],个数为3,分别是:[1, 2, 3], [2, 3, 4]
等差数列公式:
先看一个表:
| 数组 | 等差数列的数目 | 与上一组等差数列比较 |
| 1 23 | 1 | 1 - 0 = 1 |
| 12 3 4 | 3 | 3 - 1 = 2 |
| 12 3 45 | 6 | 6 - 3 = 3 |
| 1 2 3 4 5 6 | 10 | 10 - 6 =4 |
其实仔细观察,发现这是一个斐波拉切数列,0,1….n-2数的求和,动态规划找到方程了,就发现非常简单了。
这就是规律,但需要自己去发现规律,有些题目咋看一脸懵逼,仔细看就会发现其中的规律。
dp[i] 表示到i位置时,子数组的个数。数组长度大于3。
下面看下代码:
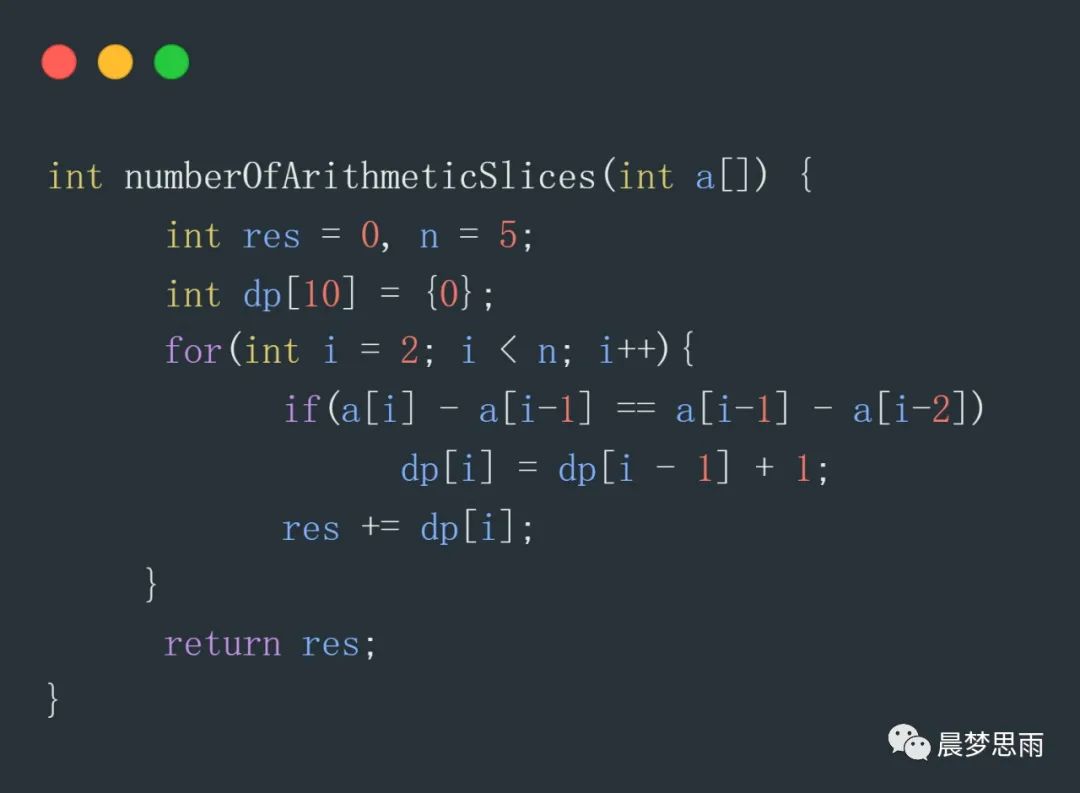
下面再看代码执行值的变化过程:
| i值 | 子数组 | dp[i] | res |
| i = 2 | 123 | 1 | 1 |
| i = 3 | 123 2341234 | 2 | 3 |
| i = 4 | 123 2341234 2345 12345 | 3 | 6 |
| i = 5 | 123 2341234 2345 1234523456123456 | 4 | 10 |
很明显,就是0,1….n-2数的求和。
最长回文子串
题目:求最长回文子串。输入: "babad",输出: "bab"。注意: "aba" 也是一个有效答案。
dp[i][j]表示,字符s从下标i到下标j,是否为回文串。
如果bab是回文串,那么ababa也是回文串。因为,在两边增加了相同的数。同理,可以给出动态方程:
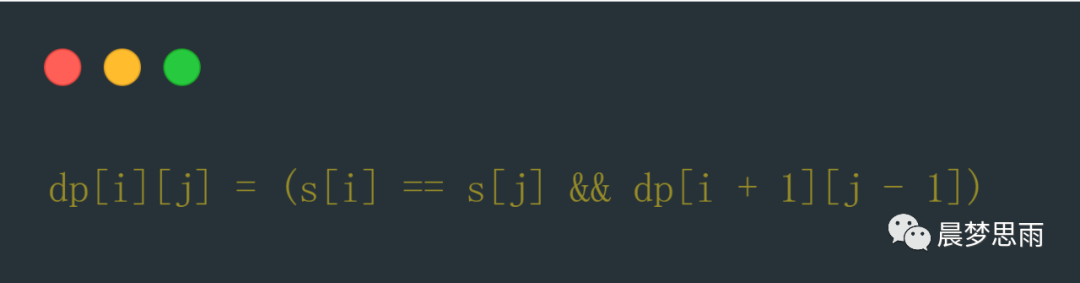
下面看下代码:
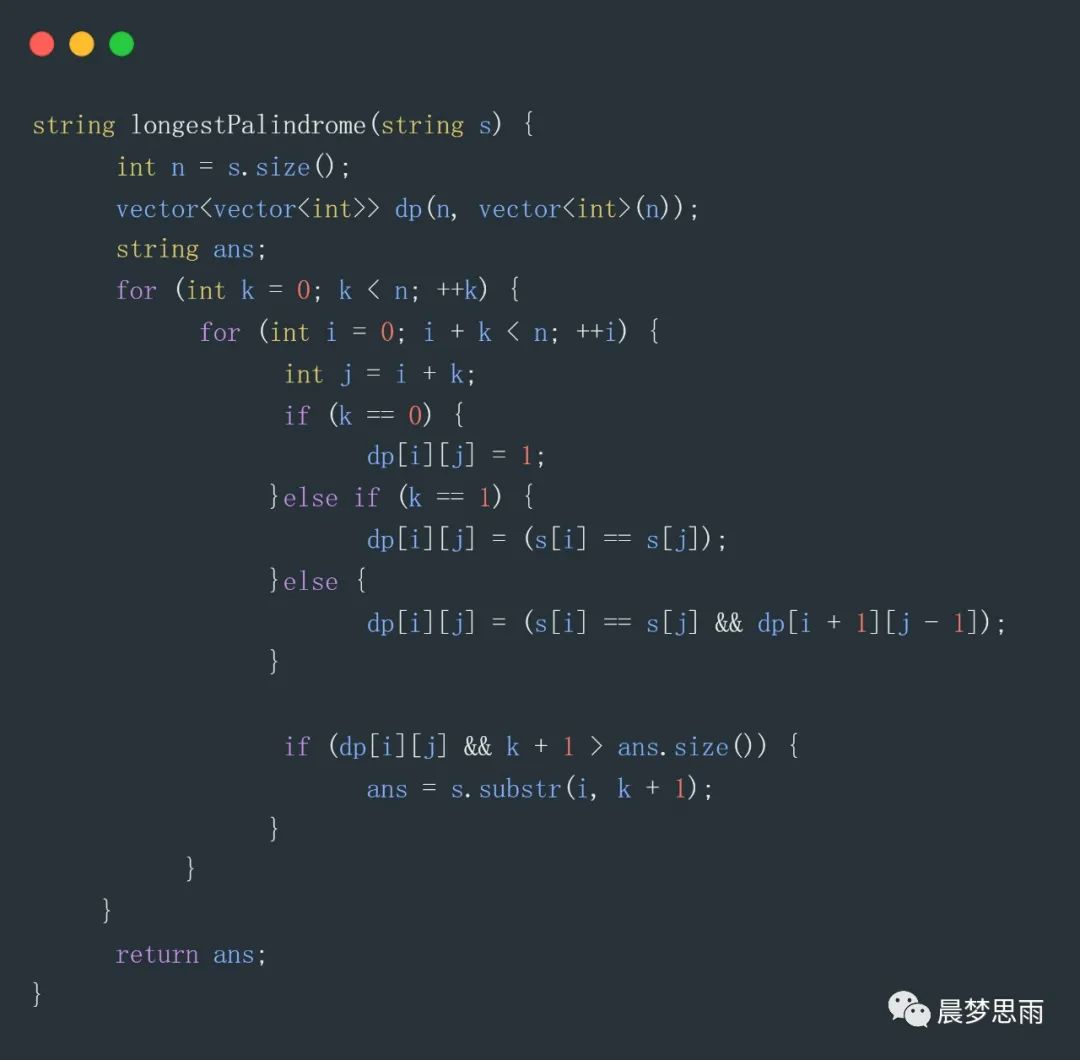
这段代码用利用了dp[i + 1][j - 1],其前面已经计算出来了。
当k = 4时,字符串最长,最后符合条件的回文子串最长。注意整个循环遍历的过程,用k最为两个下标的间距,然后遍历每种可能的结果,判断是否回文。
最长的子串最后判断,将符合条件的子串保存起来。动态规划方程推测极为重要。
最长递增子序列
求一个数组的最长自增子序列。
输入: [10,9,2,5,3,7,101,18],输出: 4。
解释: 最长的上升子序列是 [2,3,7,101],它的长度是 4。
代码如下:
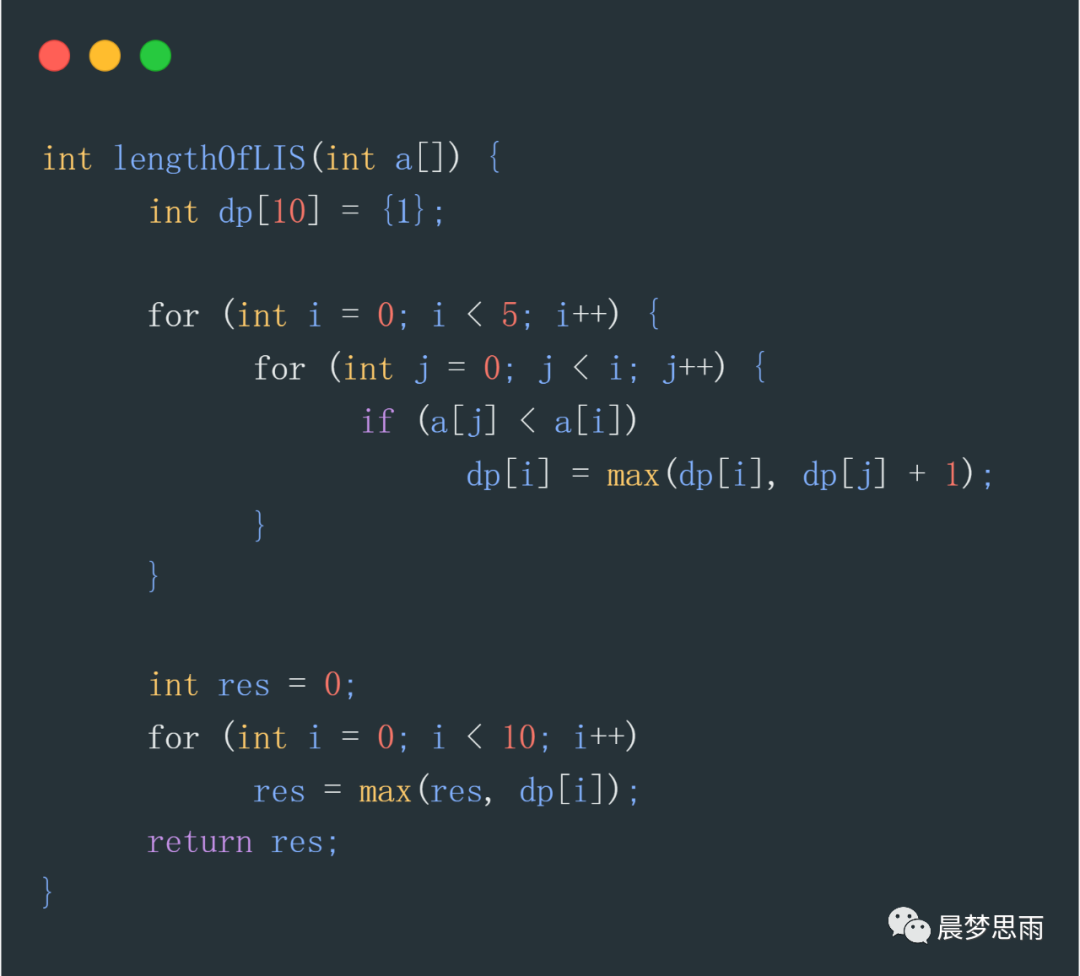
dp[i]表示以a[i]这个元素结尾的最长递增子序列的长度。
想求 dp[5] 的值,也就是想求以 nums[5] 为结尾,其最长递增子序列。
nums[5] = 3,既然是递增子序列。我们只要找到,前面那些结尾比 3 小的子序列,然后把 3 接到最后,就可以形成新的递增子序列,而且这个新的子序列长度加一。
当然,可能形成很多种新的子序列,但是我们只要最长的,把最长子序列的长度作为 dp[5] 的值即可。
根据此依次类推到前面,d[0],d[1]…d[i]都是这样求出来的,看来动态规划有些是逆推的。
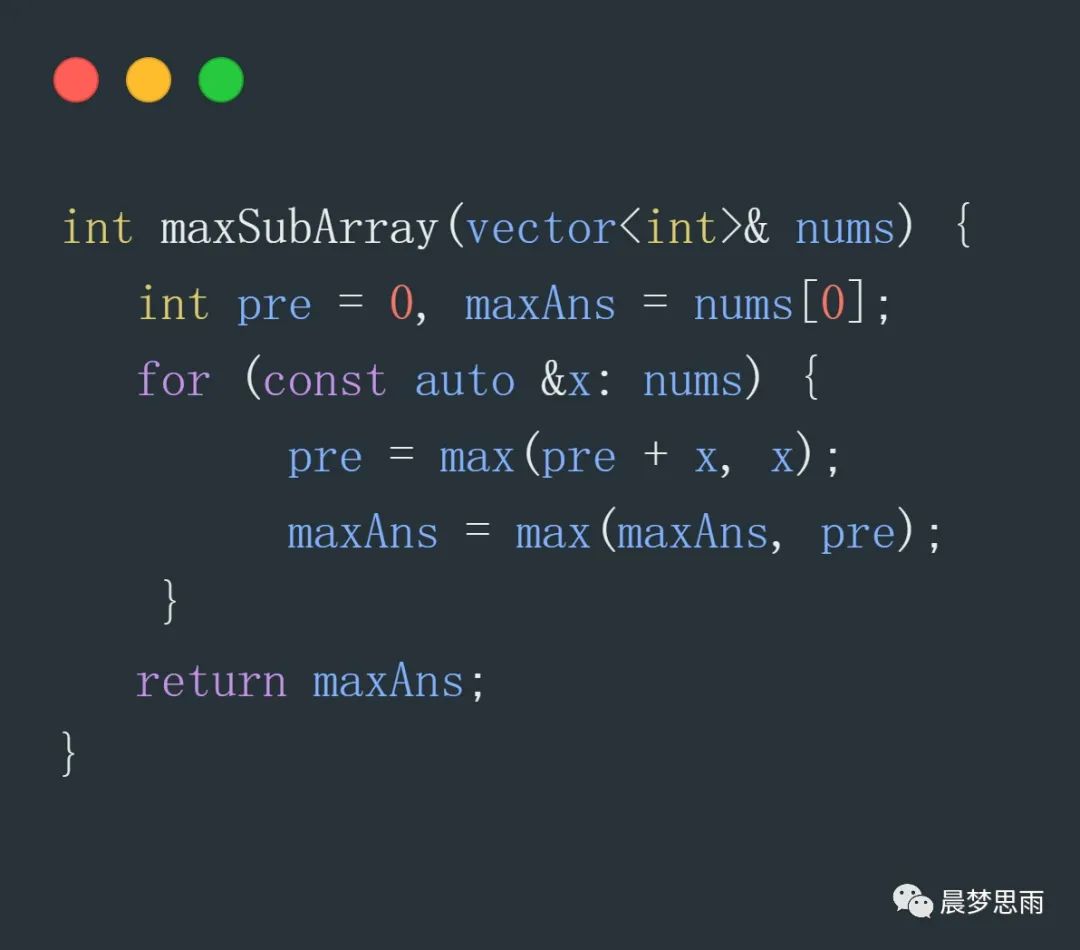
最大子序和
给定一个整数数组 nums ,找到一个具有最大和的连续子数组(子数组最少包含一个元素),返回其最大和。
输入: [-2,1,-3,4,-1,2,1,-5,4],输出: 6,解释: 连续子数组 [4,-1,2,1] 的和最大,为 6
解决思路:动态规划
动态规划方程:
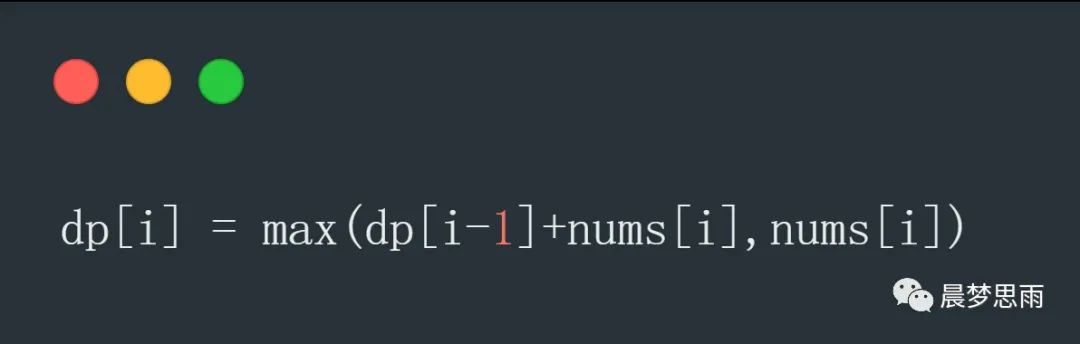
动态规划:定义dp[i]表示为nums[i]为结尾的[连续子数组的最大和。
当遍历到nums[i]时,我们需要比较nums[i]和dp[i-1]+nums[i]谁更大,然后取较大值。
代码如下:
责任编辑:lq
-
算法
+关注
关注
23文章
4761浏览量
97147 -
动态规划
+关注
关注
0文章
17浏览量
9071
原文标题:大厂动态规划面试汇总,重量级干货,彻夜整理
文章出处:【微信号:TheAlgorithm,微信公众号:算法与数据结构】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
基于感知引导的多步骤精细操作任务与运动规划
基于SIMP与折衷规划法的航空附件齿轮箱结构轻量化设计与动态特性提升

光伏电站无人机巡检管控平台如何进行任务规划管控?


投入式水位计:助力水资源规划与结构安全

AGV小车中的动态路径规划算法揭秘

AGV通信第2期 AGV集群智能路径规划解决方案

CADENAS 数字产品配置器轻松实现Ascendor电梯规划
函数指针的六个常见应用场景






 工商网监
工商网监
评论