 选择微型机器人电机时需要考虑的事项有哪些
选择微型机器人电机时需要考虑的事项有哪些

在微型机器人行业中,微型电机的应用非常多,如:手指关节、脸部、机械臂,都是通过舵机连接微型电机来进行各种动作。常见的几种电机有无刷电机、有刷电机、超声波电机、同步电机、步进电机,其中超声电机应用的较多。那么选择微型机器人电机需要考虑什么。
1、物理参数:微型电机的尺寸、轴尺寸等
2、其他参数:微型电机的减速箱参数等
3、工作电压:微型电机会存在多个电压参数,最常用的为额定电压,有的微型电机可以在超过额定电压运行一段时间,但是不可以长时间运行,不然还是会发热烧毁;
4、电流:微型电机有额定电流、空载电流和堵转电流参数;
5、转速:微型电机每分钟的旋转速度;
6、转矩:微型电机旋转时候的扭力;
fqj
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
电机
+关注
关注
145文章
9704浏览量
154799 -
微型机器人
+关注
关注
0文章
112浏览量
20231
发布评论请先 登录
相关推荐
热点推荐
机器人灵巧手新型电驱动技术:谐波磁场电机与新材料的融合革命
电子发烧友网综合报道,随着人形机器人从“能动”向“灵巧”跨越,其设计面临着极高的空间约束与性能要求。面对高功率密度、高频响应及微型化的需求。谐波磁场电机(Harmonic Field

起源于诺贝尔物理学奖得主,纳米机器人再突破!
电子发烧友网报道(文/李弯弯)纳米机器人是指体积在纳米级别(1-100纳米)的微型机器人,其研制属于分子仿生学的范畴。这一概念最早由诺贝尔物理学奖得主理查德·费曼在1959年提出,他在《微观世界有无
Neway电机方案在机器人技术方面的优势
Neway电机方案在机器人技术方面的优势Neway电机方案在机器人技术方面展现出显著优势,其通过全国产器件替代、高功率密度设计、多重保护功能、宽温工作能力以及快速交付与供应链稳定性等核
发表于 03-30 09:39
再谈低温烧结银的应用:从春晚四家机器人出镜的幕后推手说起
再谈低温烧结银的应用:从春晚四家机器人出镜的幕后推手说起
2026年马年春晚四家机器人公司:宇树、魔法原子、银河通用、松延动力的高动态、高精度、高可靠表现,背后离不开低温烧结银在电机驱动、传感器
发表于 02-17 14:07
中国科学院研发3D手型微纳机器人
微纳机器人是工作在微米至纳米尺度的“智能微型机器”,在精准医疗、环境修复等领域应用前景广阔。然而,当前微纳机器人多采用单一材料体系,功能扩展受限,复杂环境下的多刺激协同控制与多步操作成为科研挑战。为此,科研团队提出新思路,采用多
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
,已经成为机器人开发者不容忽视的核心处理器。而米尔电子的MYD-LR3576开发板,则以其丰富的接口、稳定的性能和成熟的软硬件支持,为快速原型验证和产品开发提供了绝佳的平台。如果您正在寻找一款能够同时处理复杂视觉任务和丰富交互界面的机器人主控方案,RK3576无疑是当前最
发表于 10-29 16:41
小萝卜机器人的故事
代替,
LED,
有大佬感兴趣,
一起关注和讨论代码,
这个机器人知名度不高,
可是是机器人的原型,
如果开放接口,
定位和无线充电,
也不失为未来的礼物。
让我们为小萝卜工程师的,
自掏腰包救萝卜
发表于 10-23 05:24
自制巡线解迷宫机器人(上)
,考虑到机器人总装之后的负载情况以及自己对机器人巡线速度的需求,我最终购买的N20电机减速比为30:1,且额定电压为6V时,其空载转速为300RPM(即每分钟300转),这样就能保证动
发表于 10-20 10:39
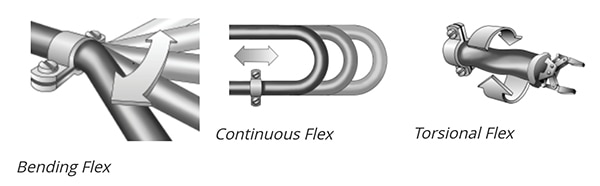
机器人 VFD 电缆选型时的运动性能考量
作者:Jeff Shepard 投稿人:DigiKey 北美编辑 为工业机器人选择变频驱动器 (VFD) 电缆时,必须考虑几个关键因素才能确保获得最小的解决方案规格和最高的可靠性。没有万能的解决方案
人形机器人关节电机:永磁电机类型解析
机器人的运动方式、负载要求和精度需求来选择。其中永磁电机凭借其高功率密度、精准控制和轻量化特性,已成为人形机器人关节驱动的核心动力源。永磁电机

工业机器人的特点
的基础,也是三者的实现终端,智能制造装备产业包括高档数控机床、工业机器人、自动化成套生产线、精密仪器仪表、智能传感器、汽车自动化焊接线、柔性自动化生产线、智能农机、3D 打印机等领域。而智能制造装备中工业
发表于 07-26 11:22
轮式移动机器人电机驱动系统的研究与开发
【摘 要】以嵌入式运动控制体系为基础,以移动机器人为研究对象,结合三轮结构轮式移动机器人,对二轮差速驱动转向自主移动机器人运动学和动力学空间模型进行了分析和计算,研究和设计了自主移动机器人
发表于 06-11 14:30
盘点#机器人开发平台
地瓜机器人RDK X5开发套件地瓜机器人RDK X5开发套件产品介绍 旭日5芯片10TOPs算力-电子发烧友网机器人开发套件 Kria KR260机器人开发套件 Kria KR260-
发表于 05-13 15:02
详细介绍机场智能指路机器人的工作原理
路径。路径规划算法会考虑多种因素,如距离最短、避开人流密集区域、优先选择宽阔通道等,以确保旅客能够快速、顺畅地到达目的地。
实时导航与避障 :在机器人引导旅客的过程中,导航系统会实时监控机器人
发表于 05-10 18:26
【「# ROS 2智能机器人开发实践」阅读体验】机器人入门的引路书
的非常好的,特别是一些流程图,很清晰的阐释了概念
很适合作为初学者入门的引路书
还能了解很多技术和框架,破除初学者的自负困境,让初学者知道功能是由很多开发者维护的,前人已经为各种产品搭建了完善的框架。避免陷入得一个人单打独斗的错觉
一直蠢蠢欲动ros2和机器人的同学,
发表于 04-30 01:05



评论