 KUKAC4-VASS机器人抓手设置
KUKAC4-VASS机器人抓手设置

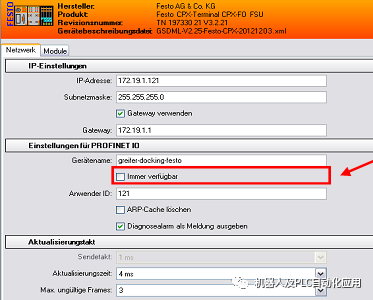
为了确保安全的PROFINET通信,必须根据下表配置PROFINET组件的更新时间。 请注意,所有设备都有自己的最短更新时间。 如果高于表中的规格,则必须为设备设置此最短更新时间。
抓手的更新时间是4S

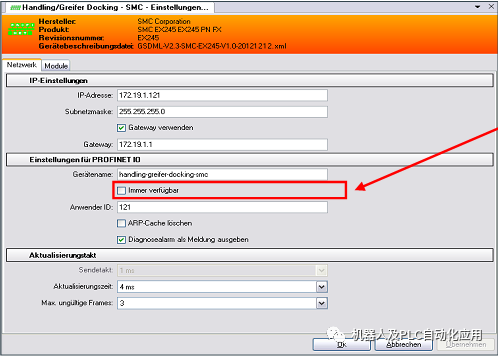
抓手使用SMC阀导:
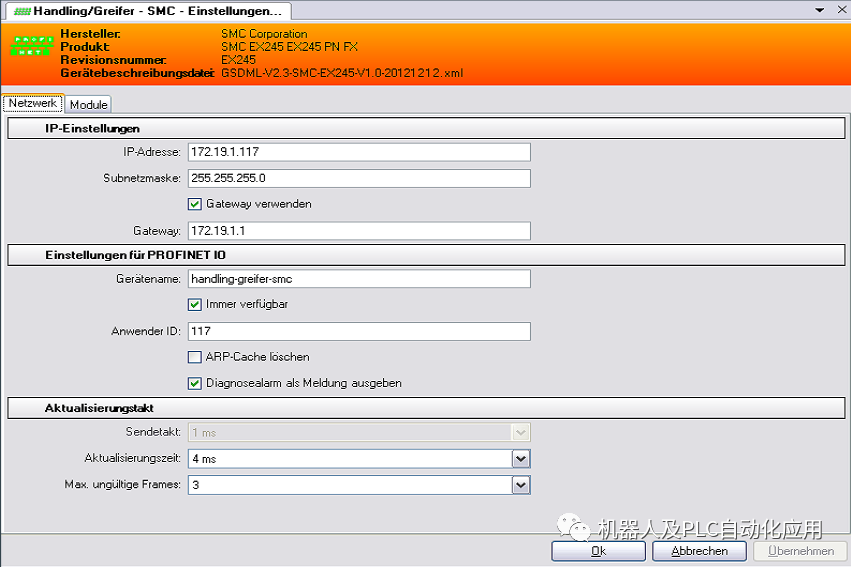

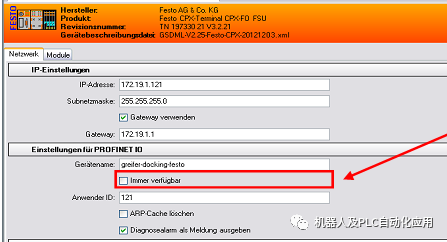
如果是快换抓手则不能勾选 “始终可用”。
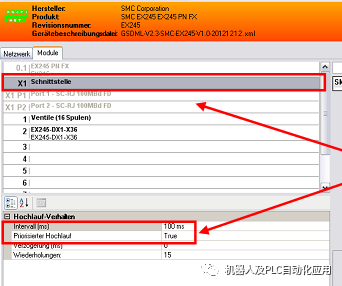
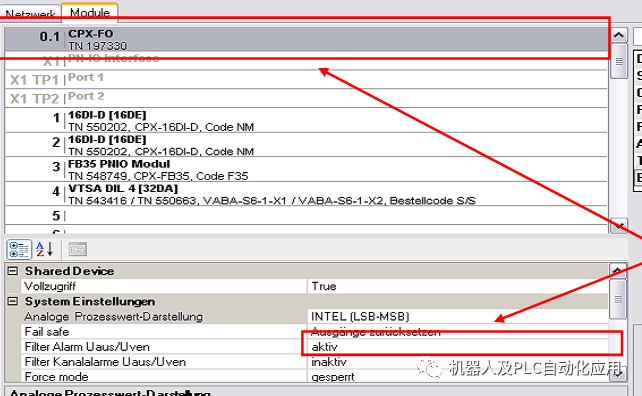
使用模块的优先启动“ True”
抓手使用FESTO阀导:
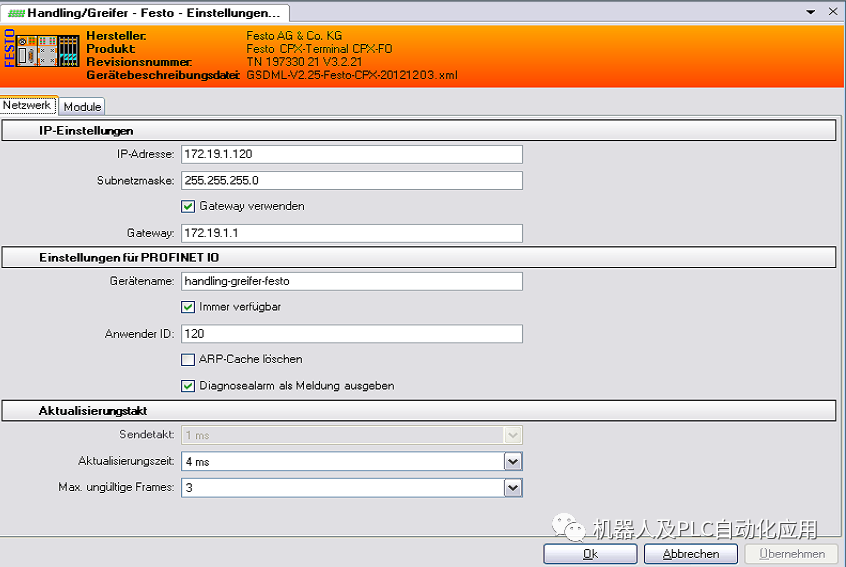
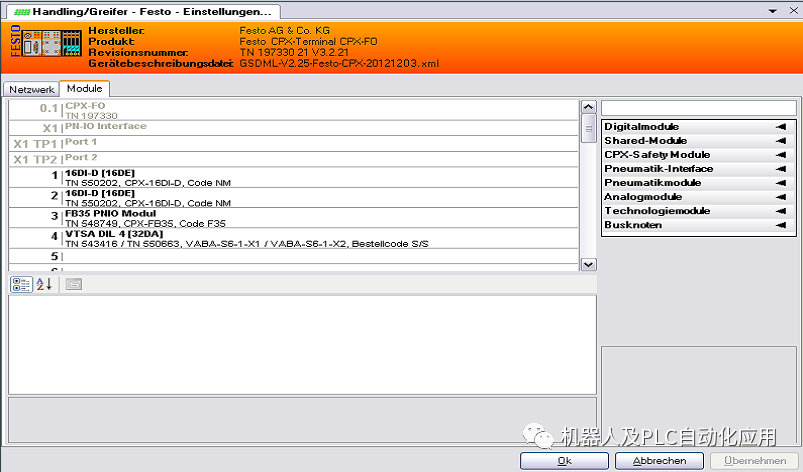
需要停用US2诊断
如果是快换抓手则不能勾选 “始终可用”。
使用模块的优先启动“ True”
3. 钳工能的设置
抓手
抓手
抓手
抓手

抓手
抓手

吸盘
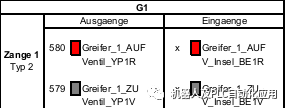
-抓手的关键输入输出点A577打开先导阀 E577先导阀打开,E578先导阀关闭-
范围-E/A 577-704
16个字节-
617-628吸盘-
579开始是夹具
M1 = E579 & E580 + E15 BT1和BT2的检测以及E15空运转POT
M1 /M2 有件/没件(自己设置)
M31 = E583 & !E584 & E585 & !E586 ~ 抓手 1 AUF 打开
M32 = !E583 & E584 & !E585 & E586 ~ 抓手1 ZU 关闭
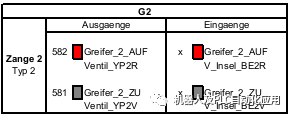
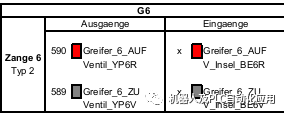
M33 = E587 & !E588 & E589 & !E590 ~抓手2 AUF 打开
M34 = !E587 & E588 & !E589 & E590 ~抓手2 ZU 关闭
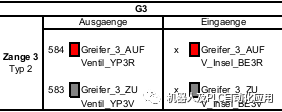
M35 = E591 & !E592 & E593 & !E594 ~抓手3 AUF 打开
M36 = !E591 & E592 & !E593 & E594 ~抓手3 ZU 关闭
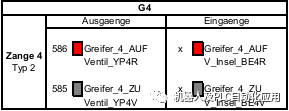
M37 = E595 & !E596 & E597 & !E598 ~抓手4 AUF 打开
M38 = !E595 & E596 & !E597 & E598 ~抓手4 ZU 关闭
M63,M64-M68 吸盘
F54 〜选择无吹气的吸入回路
F523 〜G KYP01E反馈可用控制空气(常闭触点)
F524 〜G KYP01E反馈控制空气不可用(常开触点)
;FOLDF523 = EIN -需要压力检测
F524 = AUS -不需要压力检测
责任编辑:lq
-
机器人
+关注
关注
213文章
31494浏览量
223772 -
通信
+关注
关注
18文章
6457浏览量
140278 -
Profinet
+关注
关注
9文章
2354浏览量
28354
原文标题:KUKAC4-VASS机器人抓手设置(全)
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
基于米尔RK3576核心板的国产割草机器人解决方案
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
再谈低温烧结银的应用:从春晚四家机器人出镜的幕后推手说起
探索RISC-V在机器人领域的潜力
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
小萝卜机器人的故事
自制巡线解迷宫机器人(上)
什么是机器人?追溯机器人技术的演变和未来

机器人竞技幕后:磁传感器芯片激活 “精准感知力”
蓝思科技:今年承接智元机器人全系列多款人形机器人业务
工业机器人的特点
工业机器人与协作机器人概念不同




评论