 斯坦福大学的研究团队开发了一种直观且快速的机器人手臂控制技术
斯坦福大学的研究团队开发了一种直观且快速的机器人手臂控制技术

斯坦福大学的研究团队开发了一种直观且快速的机器人手臂控制技术。传统上,控制铰接的机器人手臂既困难又费时。
研究团队的方法简化了操纵杆的操作。两种AI算法已集成在一起,以实现准确和高速的控制。
2轴操作的复杂控制
传统上,为了操作具有6至7个关节的机械臂,人必须切换操纵杆的模式。研究团队开发的技术省略了这种切换。用户只能使用上下左右两个轴的命令进行操作。
第一种AI算法根据情况引导机器人手臂动作。研究团队在特定环境下训练机器人手臂的操作。这被压缩为两轴表示。例如,该算法似乎确定要抓住的物体是门把手还是杯子。
该算法实际上并不感知物体,而是基于概率进行控制。由于意识到了这一阶段的不准确性,研究小组决定整合第二种算法。
更准确地反映人为控制
第二种算法反映了机器人手臂接近目标时的人为控制。机械臂试图通过门把手和杯子向更可靠的方向移动,但是它通过操纵杆来反映和补充人为控制。
在视频中,您可以看到机器人手臂切割并sc起豆腐,然后刺穿棉花糖将其移动,并且可以看到两种算法的集成方法比其他算法更快,更流畅。
责任编辑:lq
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
214文章
31700浏览量
224673 -
机器人手臂
+关注
关注
1文章
8浏览量
2708 -
AI算法
+关注
关注
0文章
279浏览量
13223
发布评论请先 登录
相关推荐
热点推荐
为何你的机器人手臂“知觉”存在偏差?探秘力传感器的奥秘
假如你操作过机械臂,或者在工厂里调试过用于精密装配、抛光的机器人,一定碰到过这种怪事:明明让机械臂空载停在空中,周围啥也没碰,可力传感器上的读数却显示有好几牛顿的力,甚至还带着不小的扭矩。这种感觉
发表于 04-13 15:25
如何校准斯坦福锁相放大器的增益
锁相放大器(Lock-in Amplifier)是一种用于提取微弱信号、抑制噪声的高精度测量仪器,广泛应用于物理、化学、生物及材料科学等领域。斯坦福研究系统(Stanford Research

江智机器人技术核心团队
江智机器人技术核心团队是基于江智原有15年以上车辆产品研发团队基础上,以美国卡耐基梅隆大学CMU留学回国的赵国江为核心,汇聚了

【案例分享】电子谷定制通讯线束:人形机器人稳定律动连接方案
零失真。今天为大家拆解其核心创新与场景适配优势,为何电子谷线束能成为机器人手臂连接的优选方案。01三大技术突破破解机器人运动传输核心痛点人形机器人手臂存在高频摆动

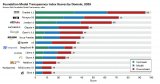
IBM Granite登顶斯坦福大学2025年基础模型透明度指数报告
IBM Granite 模型系列在斯坦福大学发布的 2025年“基础模型透明度指数”(Stanford Foundation Model Transparency Index)名列第一,并创下该指数的历史最高分。
高华科技与东南大学机器人传感与控制技术研究所签署产学研合作协议
11月19日,南京高华科技股份有限公司与东南大学机器人传感与控制技术研究所产学研合作签约仪式在高华科技成功举办。南京市仙林大学城高校合作发展

高精度机器人控制的核心——基于 MYD-LT536 开发板的精密运动控制方案
方案;
开发者可直接对接上层 ROS 框架,实现多轴机器人同步控制与智能路径规划。
三、典型应用:高精度装配机器人控制系统
在某高端电子装
发表于 11-14 15:48
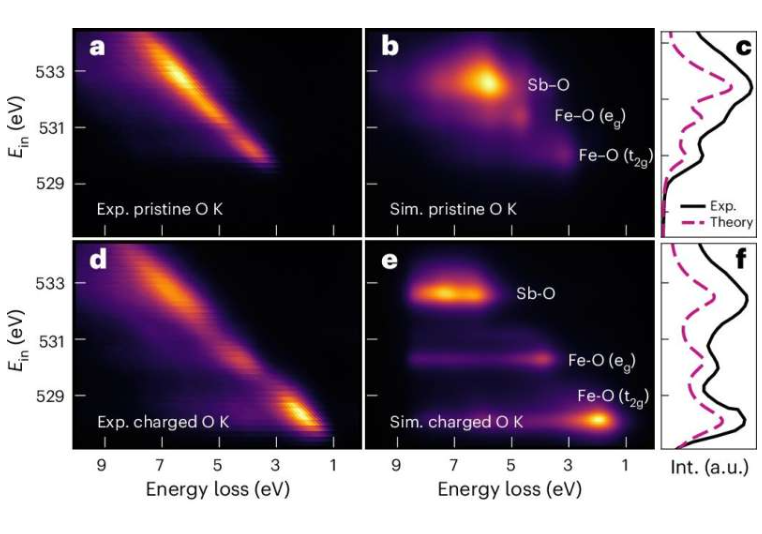
斯坦福团队开发新型铁基电池材料推动储能技术发展
这项关于铁基电池材料的发现最直接的应用前景在于锂离子电池领域。研究人员采用锂、铁、锑和氧合成的正极材料,在斯坦福大学与SLAC国家加速器实验室联合建立的电池中心进行的初步测试中表现出稳定的高电压特性
机器人竞技幕后:磁传感器芯片激活 “精准感知力”
2025 世界人形机器人运动会于 8 月 17 日圆满收官,赛场上机器人在跑步、跳跃、抓取等项目中的精彩表现,背后是运动控制、环境感知等技术的迭代升级。而在这些
发表于 08-26 10:02
介电弹性体软机器人研究:高压放大器的应用实践
进行两栖运动、攀爬和负重爬行。开发了一种高性能的摩擦电仿生机器人系统,用于驱动和控制电响应软体机器人。爬行

斯坦福(Stanford)锁相放大器故障修复
斯坦福锁相放大器是由斯坦福研究系统公司(Stanford Research Systems, SRS)研发的一款测量工具,主要用于微弱信号的测量和提取。它结合了高灵敏度、高精度、高稳定

生产线不停摆的“隐形卫士”:优比施UPS电源,精准守护机器人手臂零停机
自动化生产线的“命门”——机器人手臂的“停机焦虑”在汽车制造车间的焊接工位,在电子装配厂的精密贴片环节,在物流分拣中心的高速分拨线上,机器人手臂的突然停机如同多米诺骨牌的第一张牌——轻则导致机械臂卡

汽车智造“破界”!PROFIBUS DP转ETHERNET/IP激活机器人手臂超能力
在工业自动化4.0浪潮中,汽车制造车间对设备协同与柔性生产的需求愈发迫切。PROFIBUS DP与ETHERNET/IP协议的融合,成为打破西门子PLC与机器人手臂通信壁垒的关键技术,为汽车生产线
轮式移动机器人电机驱动系统的研究与开发
系统,开发了一套二轮差速驱动转向移动机器人电机驱动系统,完成了系统各部件的整体装配和调试。试验结果表明,该设计方案可行、系统运行稳定可靠、成本低廉、所用元件易于购置,具有较好的实用的价值和应用前景。
纯
发表于 06-11 14:30



评论