 ABB机器人圆形输送链相关参数解释
ABB机器人圆形输送链相关参数解释

1. 通常的机器人输送链跟踪,均为直线输送链跟踪,例如下图
2. 有些情况,输送链为圆形,例如文首的图例。ABB机器人也支持圆形输送链跟踪。与直线输送链跟踪相比,配置主要区别为直线跟踪的单位是“米”,圆形跟踪的单位是“弧度”。以下参数为圆形输送链相关参数解释。
参数名举例
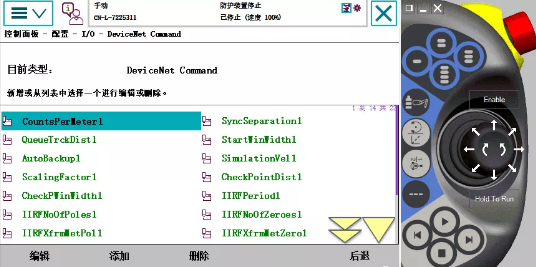
CountsPerMeter40000 counts per radian
At 6 m radius, one count = 0.15 mm
minimum distance 最小跟踪距离-100 milliradians
At 6 m radius, = -600 mm
Conveyor base frame 输送链基坐标Base frame x = 8.0 m
Base frame y = 0.0 m
Base frame z = 0.0 m
The x-axis is rotated 2.44 rad from the world X (XIRB)Base frame q1 = 0.3420
Base frame q2 = 0.0000
Base frame q3 = 0.0000
Base frame q4 = 0.9397
SyncSeparation0.005 rad
At 6 m radius = 30 mm
QueueTrkDist0.017 rad
At 6 m radius = 100 mm
maximum distance420 milliradians
At 6 m radius = 2520 mm
StartWinWidth0.017 rad
At 6 m radius = 100 mm
3. 以上参数设置同Linear跟踪,主要在配置-I/O的DeviceNet Command下
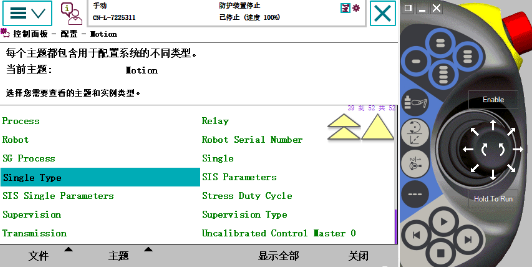
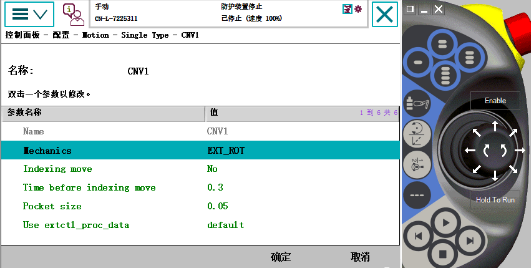
4. 对于圆形跟踪,需要将配置-主题Motion下的Single Type的Mechanics改为ext_rot
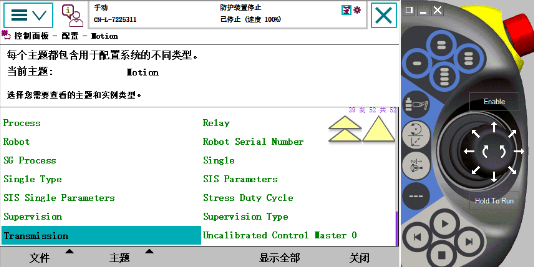
将配置-主题Motion下的Transmission的Rotating Move改为Yes
责任编辑:xj
-
机器人
+关注
关注
213文章
30600浏览量
219657 -
ABB
+关注
关注
26文章
570浏览量
55909
发布评论请先 登录
ABB机器人业务出售给软银集团
突发!ABB机器人业务易主,软银53.75亿美元接盘
工业机器人的特点
ABB推出三大全新机器人系列
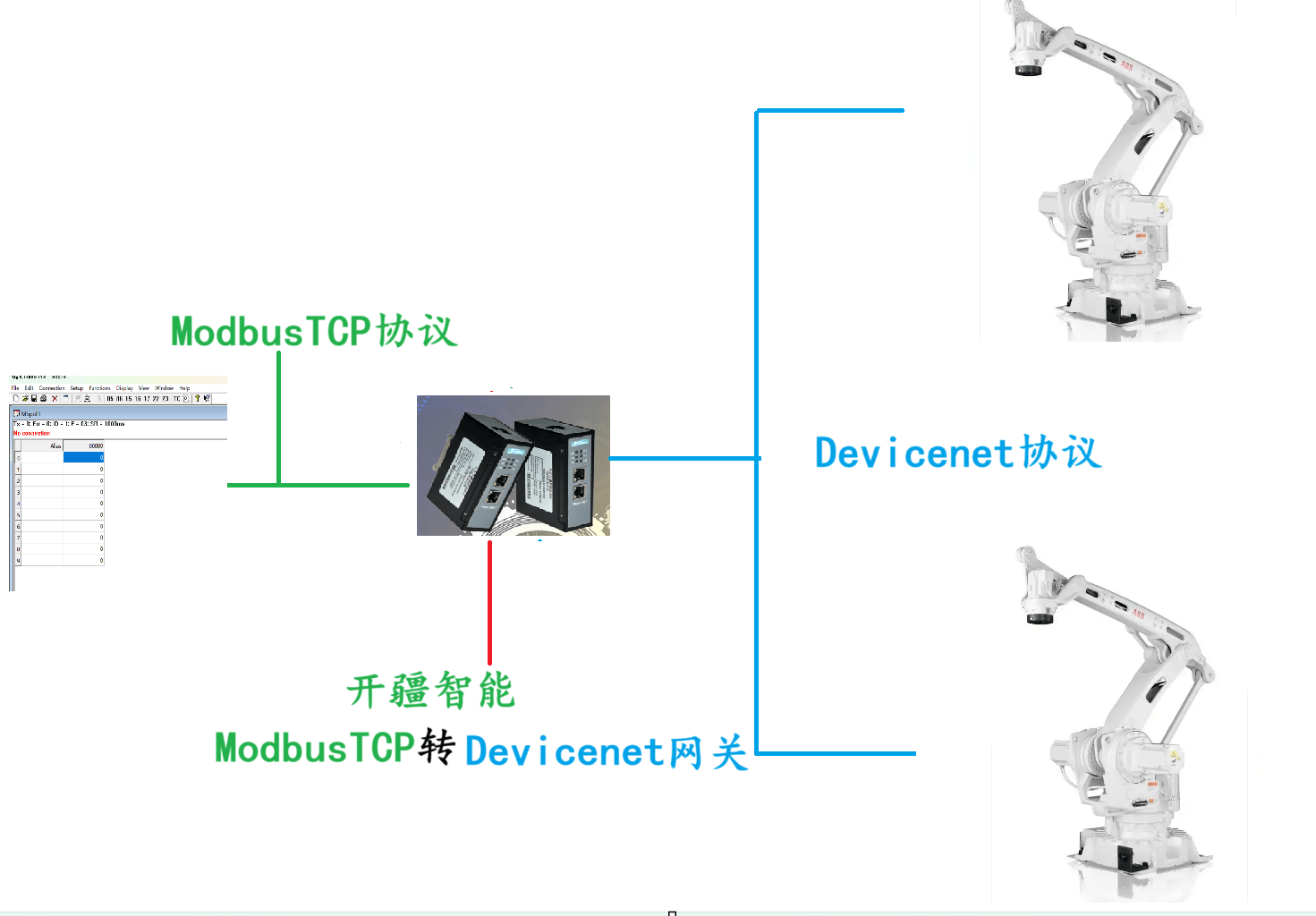
开疆智能ModbusTCP转Devicenet网关连接三菱PLC与ABB机器人配置案例

开疆智能ModbusTCP转Devicenet网关连接ABB机器人配置案例
开疆智能Profient转ModbusTCP网关连接ABB机器人MODBUS TCP通讯案例

盘点#机器人开发平台
2025年4月工业机器人相关产业链新品发布情况

ABB机器人与西门子PLC通讯案例
ABB机器人(机械手臂)数据采集到MES系统解决方案

ABB机械手臂(机器人)数据采集物联网解决方案

【「具身智能机器人系统」阅读体验】2.具身智能机器人大模型
ModbusTCP转Profinet:ABB机器人与PLC的高效连接





 工商网监
工商网监
评论