 新型遥操作系统:双腿机器人借用人类技能可敏捷性移动
新型遥操作系统:双腿机器人借用人类技能可敏捷性移动

MIT的小爱马仕想借用你的大脑
麻省理工学院(MIT)的研究人员展示了一种新型遥操作系统(teleoperation system),可以让双腿机器人“借用”人类的身体技能,从而以更大的敏捷性移动。这个系统的工作原理有点像斯皮尔伯格电影《头号玩家》中的触觉套装,不过电影中的套装是用来连接人类与虚拟化身的,而麻省理工学院的这个套装则将人类连接到一个真正的机器人上。
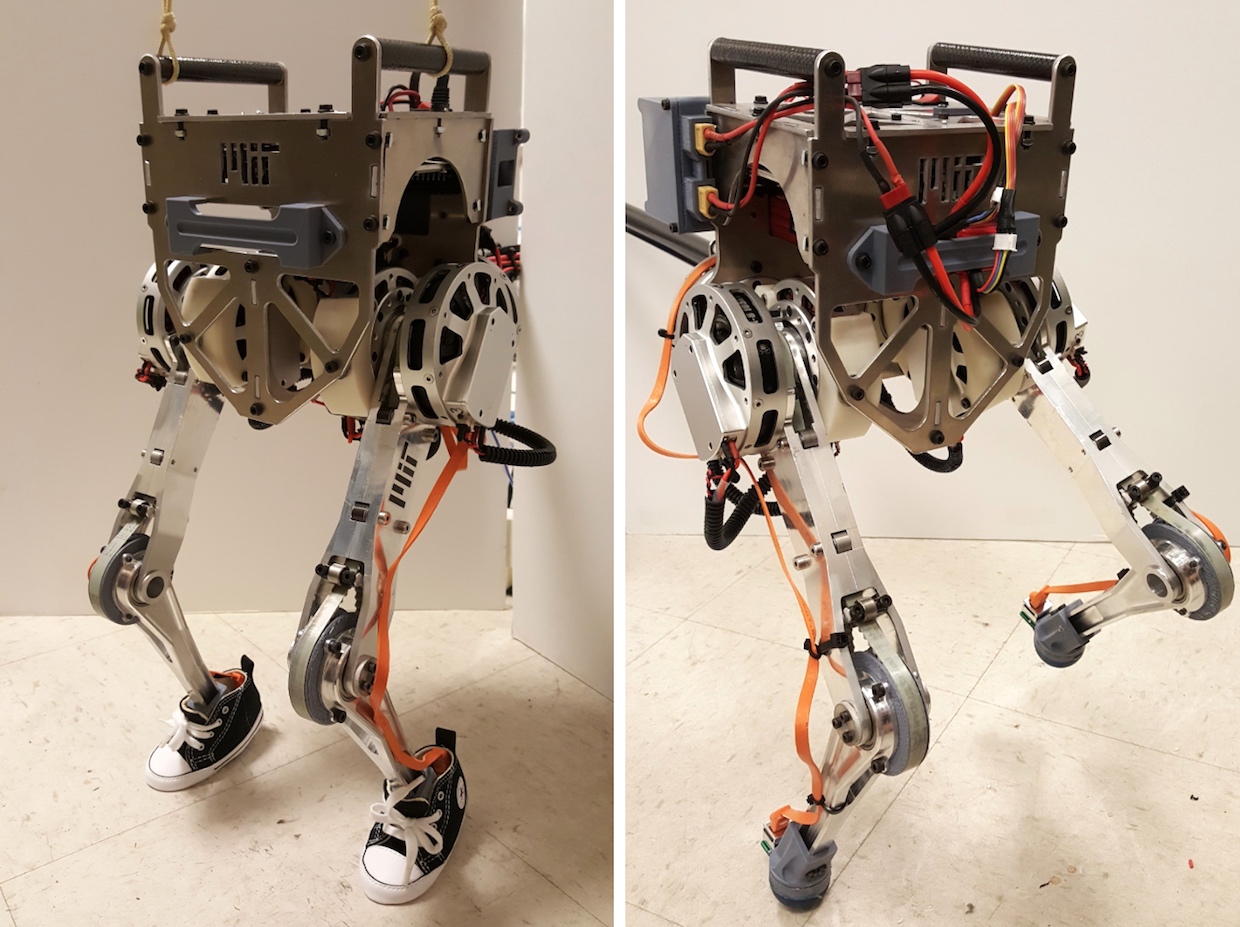
这个机器人的名字叫“小爱马仕( Little HERMES )”,目前只有一对小腿,体积约是普通成年人的三分之一。在龙门架的支撑下,它可以原地踏步和跳跃,也可以短距离行走。虽然这本身没有什么特别的,但研究人员说,他们的方法可以帮助那些有强大能力的救灾机器人更接近现实。他们补充道,尽管最近机器人技术取得了一些发展,但制造像人类一样运动和决策的全自主机器人仍然是一项挑战。而一个更先进的远程操作系统可以帮助实现这个目标。
现任伊利诺伊大学-香槟分校的助理教授 João Ramos和MIT仿生机器人实验室主任Sangbae Kim在本周的《科学机器人( Science Robotics)》杂志上描述了这个项目。他们在论文中指出,现有的遥操作系统常常不能有效地把操作员的运动匹配到机器人的运动。此外,传统的系统没有向遥操作人员提供关于机器人正在做什么的物理反馈。他们的新方法解决了这两个局限性,为了在实践中验证,他们建造了小爱马仕机器人。
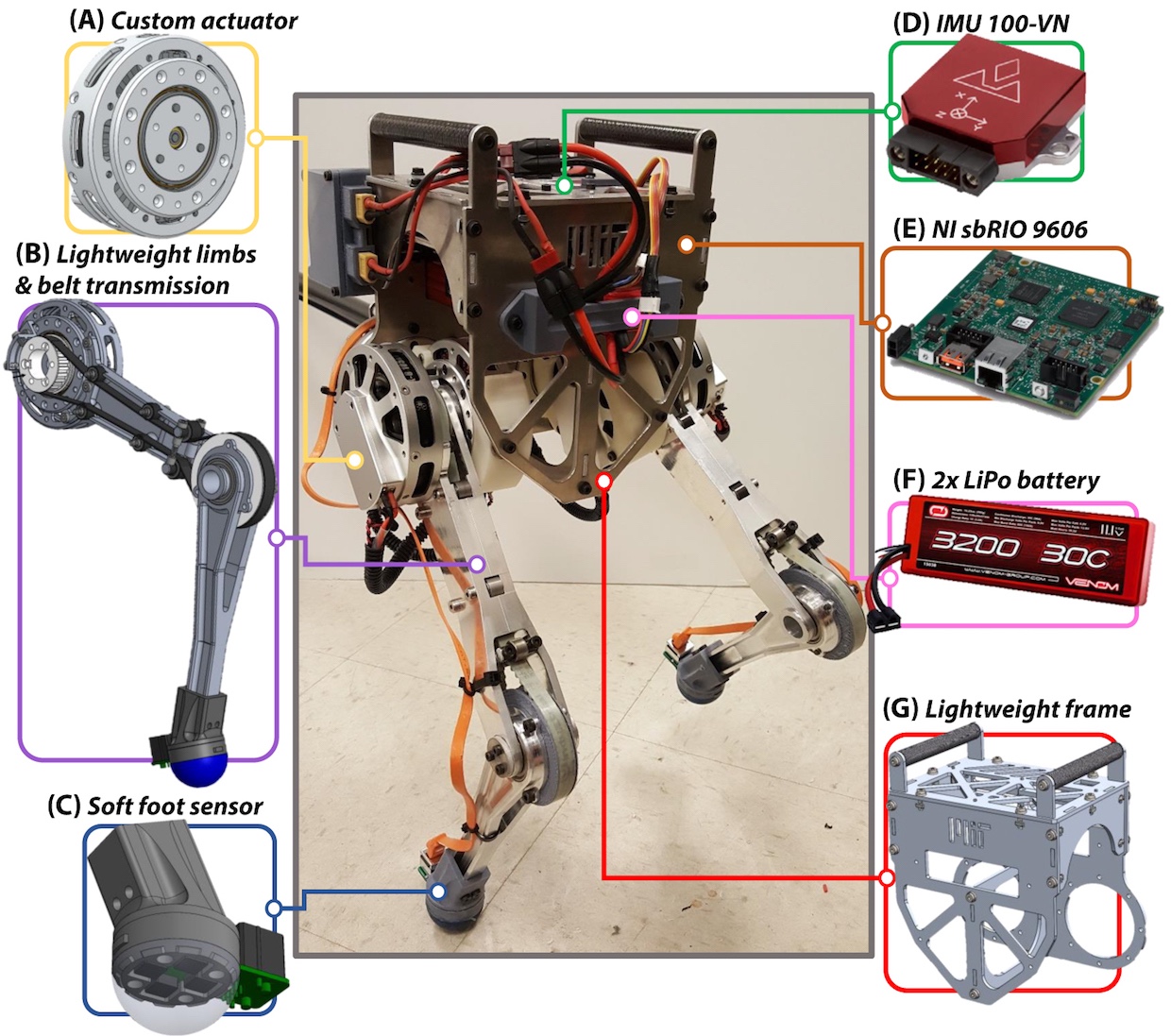
“小爱马仕”双足机器人的主要部件
如上图所示,“小爱马仕”双足机器人的主要部件有:(a)被设计成能够承受冲击和产生高扭矩的定制驱动器。(b)具有低惯性和快速摆动能力的轻质肢体。(c)耐冲击和轻量级的具有三轴接触力传感器的足部传感器。(d)用来估计机器人的躯干姿态、角速度和线性加速度的加固型IMU(惯性测量单元)。(e)来自美国国家仪器(National Instruments)的实时计算机sbRIO-9606。(f)两个串联的三芯锂聚合物电池。(g)使机器人质量最小化的刚性轻质框架。
今年早些时候,麻省理工学院的研究人员为IEEE Spectrum撰写了一篇关于该项目的深入文章,其中包括小爱马仕(Little HERMES)和它的“大兄弟”大爱马仕(即HERMES,用于高效的机器人机制和机电系统)。在那篇文章中,他们描述了系统的两个主要部件:
“…我们正在创建一个遥机器人系统,它有两个部分:一个是能够敏捷行动的仿人机器人,另一个是一种新型的双向人机界面,它将你的动作发送给机器人,也将机器人的动作发送给你。因此,如果机器人踩到碎片上开始失去平衡,操作者也会感到同样的不稳定并本能地做出反应避免摔倒。然后,我们捕捉到这个物理反应并将其发送回机器人,这也有助于机器人避免摔倒。通过这种‘人-机’的连接,机器人可以利用操作者天生的运动技能和瞬间的反应来站稳脚跟。
你可以说我们把人脑放进了机器里。”
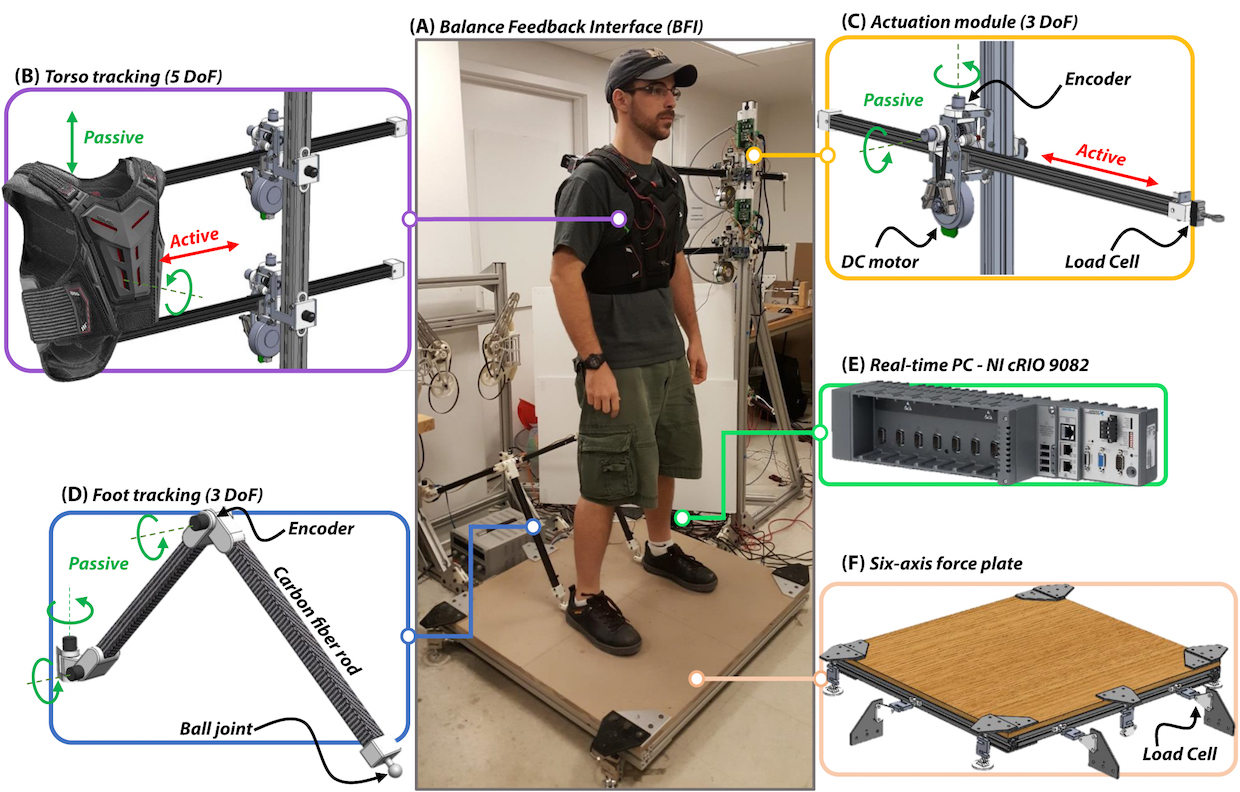
平衡反馈接口(BFI)的主要模块,图来自:Science Robotics
MIT的研究人员为控制小爱马仕而创建的人机界面不同于传统人机界面,它依靠操作者的反应来提高机器人的稳定性。研究人员称之为平衡反馈接口(BFI,Balance-Feedback Interface)。如上图所示,BFI的主要模块包括:(A)躯干和足部的定制化接口附件,用于高速(1kHz)捕获人体运动数据。(B)两个欠驱动模块,用于跟踪躯干的位置和方向,并向操作员施力。(C)每个驱动模块有三个自由度,其中一个是由直流无刷电机驱动的推杆/拉杆。(D)一系列带有被动关节的链环,与操作者足部相连并跟踪其空间平移。(E)来自美国国家仪器(National Instruments)的实时控制器CRIO-9082,以关闭BFI的控制回路。(F)测力板,用于估计操作员的压力中心位置,并测量操作员净接触力的切向力和法向力。
在《科学机器人》的新论文中,麻省理工学院的研究人员解释了他们如何解决远程操作系统有效性的关键挑战之一:
“这一策略的挑战在于将人体运动正确地映射到机器上,同时告知操作者机器人复制的运动有多接近。因此,我们为双边反馈策略提出了一种解决方案,以控制两足机器人与人类操作者同步进行踏步、跳跃和行走。这种动态同步是通过(i)将人类运动数据的核心部分实时缩放到机器人的比例,以及(ii)对操作者施加与人机之间的相对速度成比例的反馈力来实现的。”
讲真,小爱马仕现在正在迈出它的第一步,但研究人员说,他们希望使用类似设计的“机器腿”作为一个更先进的仿人机器人的一部分。他们的愿景是:创造一种快速移动穿越各种地形的四足机器人,然后在需要时变形成两足机器人,用“手”进行灵巧的操作。这可能需要融合MIT研究人员在实验室里创造的一些其他机器人,比如在猎豹和爱马仕,或者迷你猎豹和小爱马仕之间创造出混合体。我们迫不及待地想看看最终的机器人会是什么样子。
编辑:hfy
-
机器人
+关注
关注
214文章
31650浏览量
224565 -
驱动模块
+关注
关注
0文章
69浏览量
14918 -
爱马仕
+关注
关注
0文章
3浏览量
1800
发布评论请先 登录
开源鸿蒙机器人操作系统M-Robots OS 2.0重磅发布

开源鸿蒙机器人操作系统M-Robots OS 2.0重磅发布

国家专项评估收官,鸿道赋能工业机器人操作系统创新突破

润和软件亮相2025智能机器人操作系统开源社区生态大会

机器人用霍尔电流传感器,能提升操作安全性么?

EtherCAT主站协议栈EC-Master在ROS(机器人操作系统)中的应用

探索RISC-V在机器人领域的潜力
机器人竞技幕后:磁传感器芯片激活 “精准感知力”
NVIDIA助力构建人形机器人全身遥操作仿真平台
全国首个开源鸿蒙机器人操作系统 M-Robots OS 正式开源

轮式移动机器人电机驱动系统的研究与开发
人形机器人敏捷开发新路径:RT-Thread以软件底座破解复杂系统难题 | 新闻速递




评论