 可例化的XPM方案解析
可例化的XPM方案解析

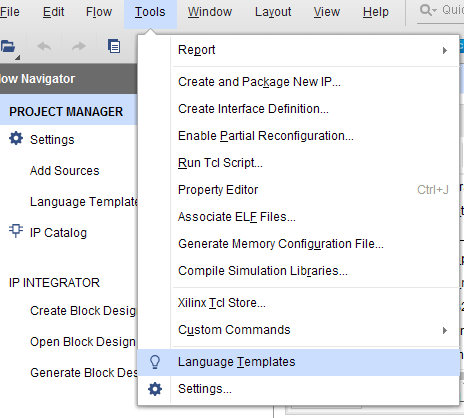
首先,什么是XPM?可能很多人没听过也没用过,它的全称是Xilinx Parameterized Macros,也就是Xilinx的参数化的宏,跟原语的例化和使用方式一样。可以在Vivado中的Tools- > Language Templates中查看都有哪些XPM可以例化。
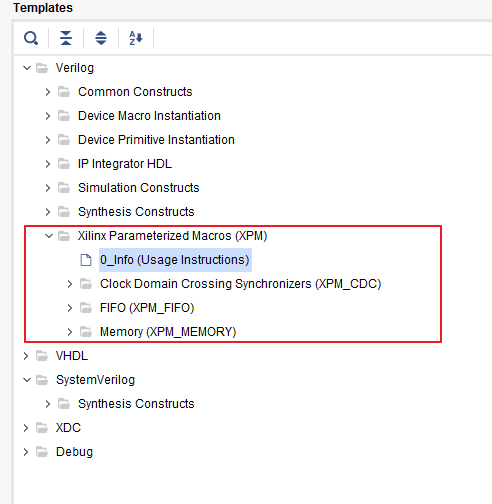
从上图中可以看出,目前可以例化的XPM主要有三种:跨时钟域处理、FIFO和MEMORY。
我们以MEMORY为例,在Vivado中可以通过下面四种方式调用FPGA中的存储单元,均可以选择是Block RAM还是Distributed RAM.
1. RTL代码
我们在定义一个memory变量后,可以在前面指定其资源类型:
(* ram_style = "block" *)reg [3:0] mem_bram [15:0] ; (* ram_style = "distributed" *)reg [3:0] mem_dram [15:0] ;
使用RTL代码的方式非常灵活,但由于少了很多的控制项,综合后的结果可能不是最优的。
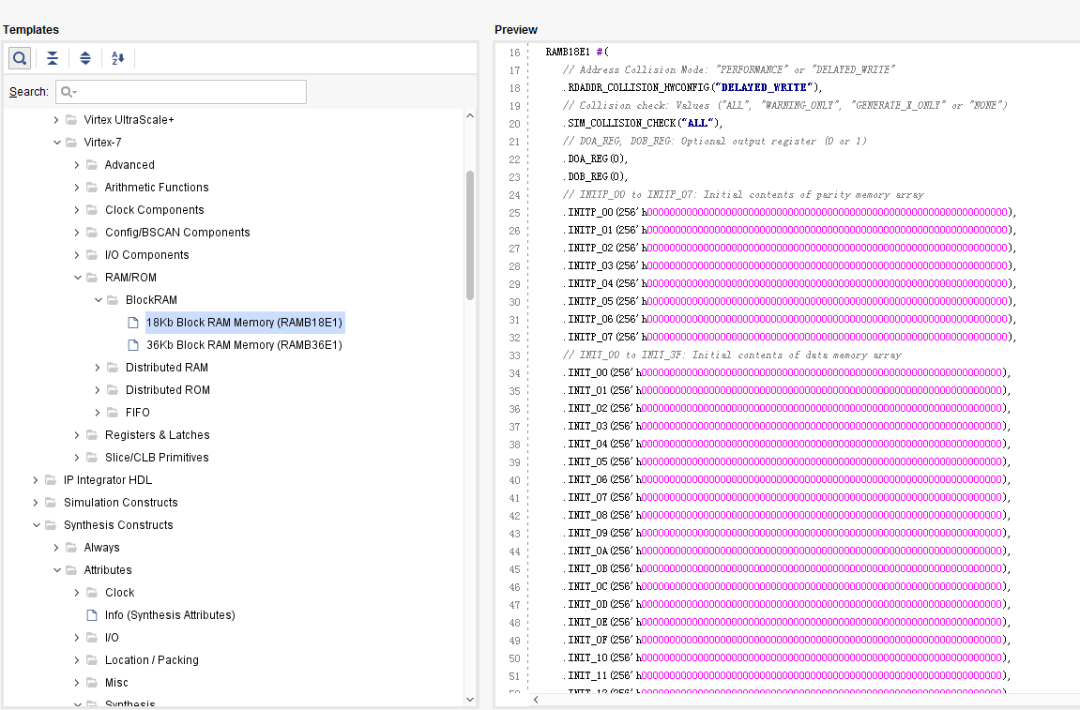
2. 原语(Primitive)
使用原语也可以例化MEMORY,但没见几个工程师这么用过,因为接口实在太多了,所以实用性不高。
3. IP Core
这种方式应该是使用最多的,但缺点也很明显:
当修改参数时需要重新打开IP,然后Generate;
不同版本的Vivado之间还需要进行Update;
有时没注意到IP中的参数,导致结果并不是自己想要的;
最近在调试中就碰到这样一个问题,FIFO中的默认输出延迟是1,即输出数据比读使能晚一拍,而且Output Registers默认是不勾选的。但这个选项不知道什么时候被改了,导致程序最终的输出结果一直有问题,在debug时一直检查的是RTL代码,直到定位到FIFO模块时才发现了这个问题。如果此时我们使用的是XPM,那从代码中很容易就能看出来
错误。
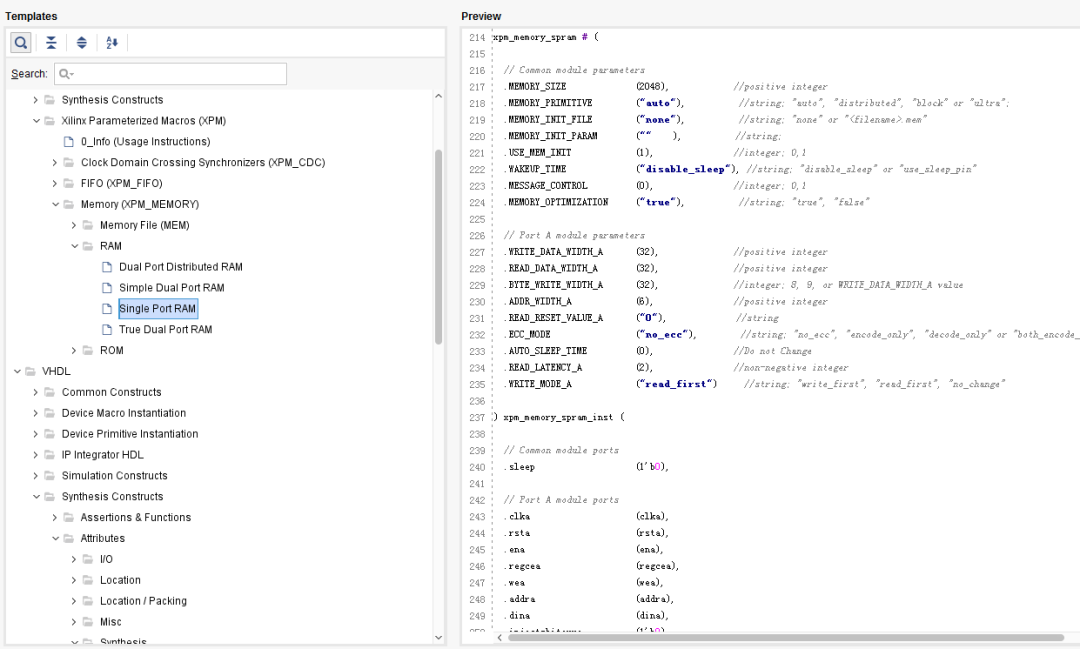
4. XPM_MEMORY
相对而言,XPM的缺点就不是很明显,纯代码例化的方式更加灵活、简单。
编辑:hfy
-
FPGA
+关注
关注
1665文章
22577浏览量
641001 -
Xilinx
+关注
关注
73文章
2209浏览量
132226 -
XPM
+关注
关注
0文章
12浏览量
8938
发布评论请先 登录
英飞凌低压驱动可扩展功率演示板:模块化设计与应用指南
光伏四可装置软件系统架构:微服务化设计与容器化部署方案
登临科技基于纳适系列国产化GPU推出文档PDF解析行业解决方案

MD662H高速DAC替代方案全解析:采样率、复用与性能权衡
北斗定位天线产品方案选型指南与应用方案解析
深度解析国产电机驱动IC,一颗可替代DRV8813的双通道集成电机驱动器
BOSCH PM6功率模块平台化方案深度解析

“四可”标准体系解析:国标与电网接入规范的合规性指南

E203外设的例化与编译配置
Xilinx BRAM IP核配置及其例化
智慧水务物联网监测解决方案设计 ——以数据驱动全流程水务管理,实现智能化、精细化、可持续化运营
基于开源鸿蒙的AVPlayer视频播控开发样例

基于开源鸿蒙的视频播放开发样例

EtherCAT与Profinet协议转换在工业自动化中的应用:以汇川伺服驱动器为例



评论