 两机器人相撞之后会出现轴过载,那么影响这个过载的变量是什么呢?
两机器人相撞之后会出现轴过载,那么影响这个过载的变量是什么呢?

两机器人相撞之后会出现轴过载,那么影响这个过载的变量是什么呢?
$TORQMON[n]各轴的负载保护因数
程序模式下扭矩监控的电流因数(力感应扭矩)
如果机器人与物体碰撞,则机器人控制器会增加轴转矩以克服阻力。这可能会损坏机器
人,工具或其他物体。变量$ TORQMON []包含程序模式下轴转矩的当前公差范围。
$ TORQMON [轴号] =因子,默认值200,过载电流的百分比,即200%.
因此我就想如果我想在KUKA 机器人初期调试工作过程中减少互锁区设置失误而碰撞的损失,我们可否给变量$ TORQMON 减小。
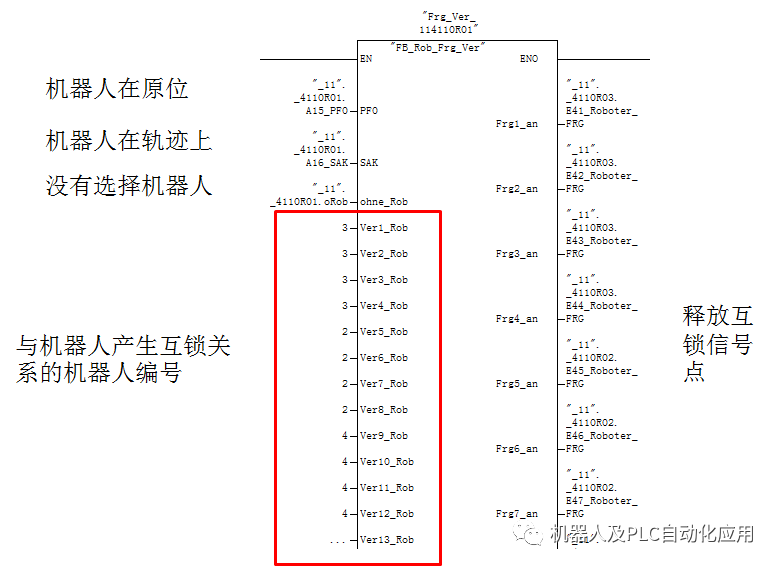
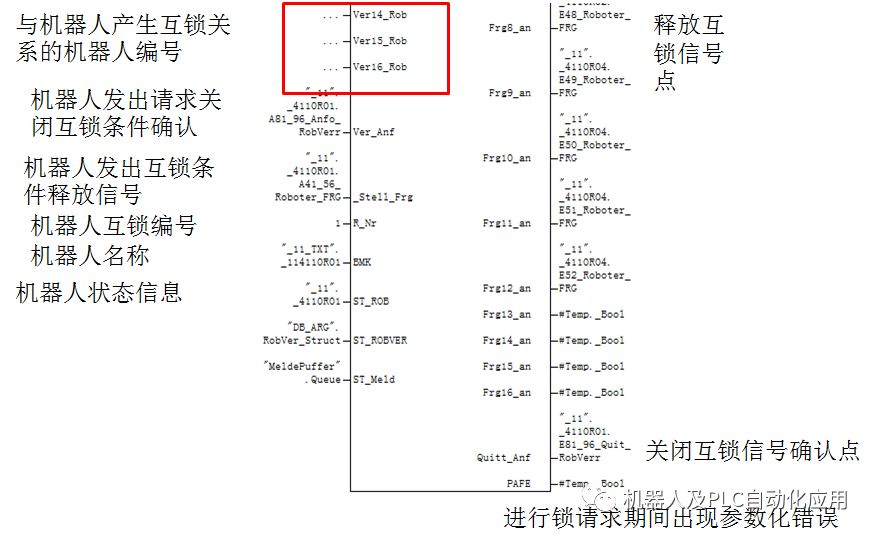
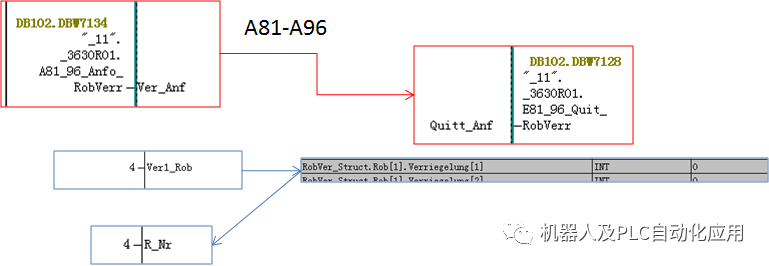
VASS标准的A/E41-56机器人互锁信号,A/E81-96用于机器人与PLC确认关闭互锁信号.
每个机器人标准有16个锁定命令可用,这些命令已永久分配给I / O。
在在线驾驶条件下必须查询相应的锁定输入。
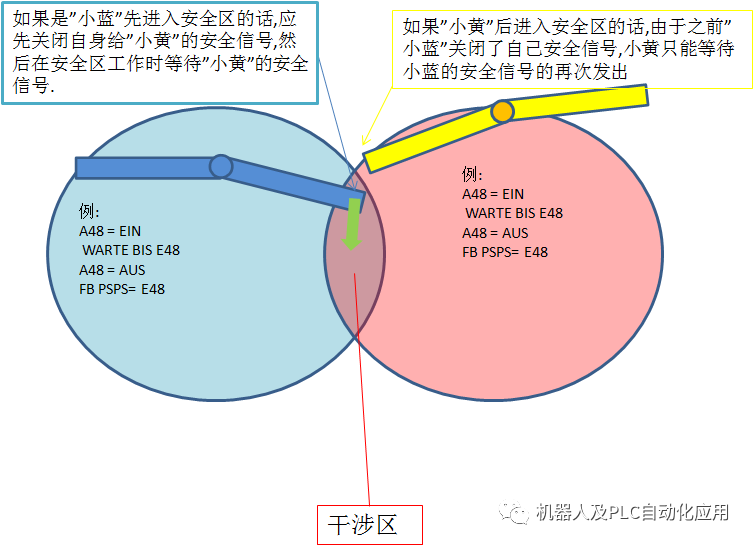
1.进入安全区时:
如果是”小蓝”先进入安全区的话,应先关闭自身给”小黄”的安全信号,然后在安全区工作时等待”小黄”的安全信号.
如果”小黄”后进入安全区的话,由于之前”小蓝”关闭了自己安全信号,小黄只能等待小蓝的安全信号的再次发出
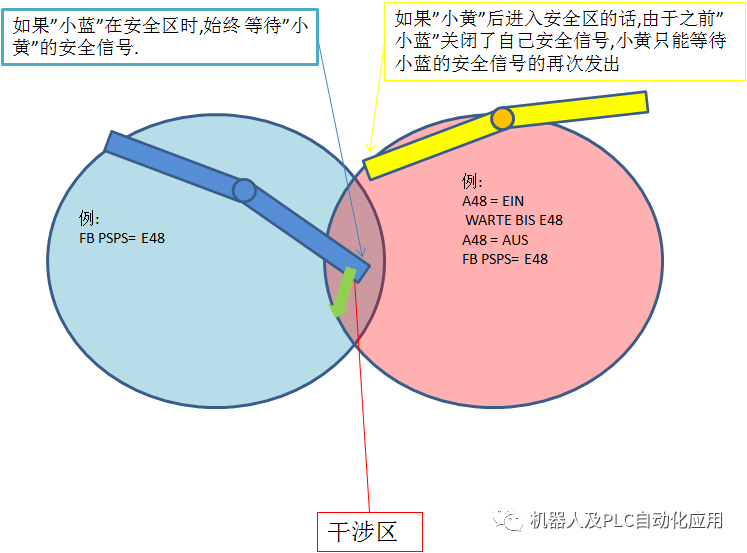
2.在安全区时:
如果”小蓝”在安全区时,始终 等待”小黄”的安全信号.
如果”小黄”后进入安全区的话,由于之前”小蓝”关闭了自己安全信号,小黄只能等待小蓝的安全信号的再次发出.
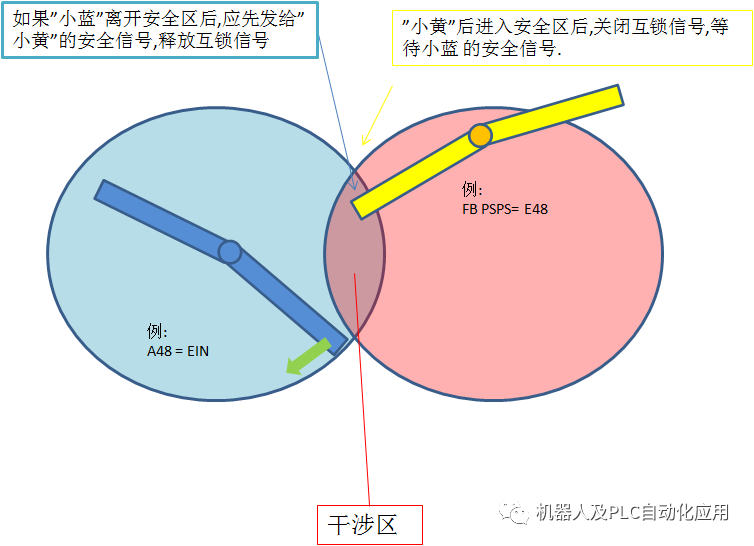
3.离开安全区时:
如果”小蓝”离开安全区后,应先发给”小黄”的安全信号,释放互锁信号.
”小黄”后进入安全区后,关闭互锁信号,等待小蓝的安全信号.
PLC对机器人干涉区的控制:
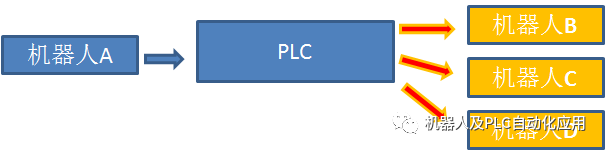
VASS 标准使用的互锁标准:互锁示意图,设定机器人之间互锁所使用的IO范围.
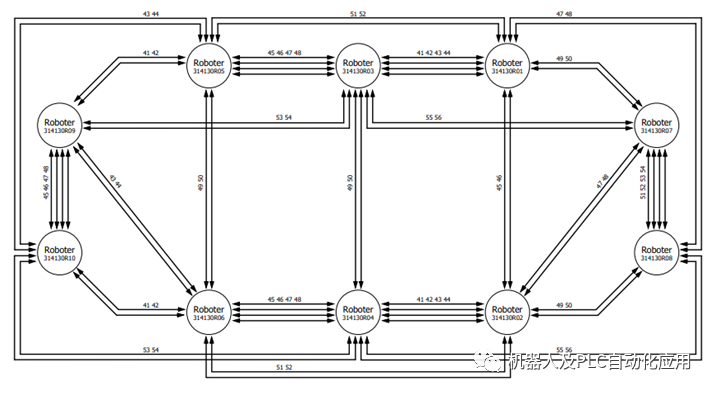
FB207机器人互锁信号控制:
可以设置机器人在原位时默认发出互锁释放信号.
-
机器人
+关注
关注
213文章
31494浏览量
223772 -
变量
+关注
关注
0文章
616浏览量
29571 -
过载
+关注
关注
2文章
112浏览量
20714
原文标题:前几天两个机器人相撞了,所以想聊聊防撞区和机器人轴过载保护
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
六维力传感器:当机器人拥有“真实触觉”,未来会发生什么?
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
Neway电机方案在机器人技术方面的优势
变频器变频加速时过载的原因

机器人用霍尔电流传感器,能提升操作安全性么?

探索RISC-V在机器人领域的潜力
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
小萝卜机器人的故事
自制巡线解迷宫机器人(上)
什么是机器人?追溯机器人技术的演变和未来

机器人竞技幕后:磁传感器芯片激活 “精准感知力”
工业机器人的特点
可编程电源长期过载会有什么影响?
大象机器人携手进迭时空推出 RISC-V 全栈开源六轴机械臂产品




评论