 微型机器人来袭,可游走于人体探索大脑信号
微型机器人来袭,可游走于人体探索大脑信号
像小说《科学怪人》中弗兰肯斯坦的 “怪物” 苏醒过来一样,在一块计算机芯片大小的硅晶圆片上并排放置的数万个微型机器人,只需要照射一束激光,它们就可以挣脱束缚、自由爬动......
尽管这样的场景听起来非常科幻,但如今微型机器人 “大军” 确实来了!
“我们能为你最喜欢的硅电子器件安上双腿,然后制造一百万个这样的器件,这是我们的愿景。”美国宾夕法尼亚大学电气与系统工程教授马克·米斯金(Marc Miskin)说。
米斯金说的 “器件” 正是腿长不足 0.1 毫米(约为一根人类头发的直径)的机器人。据米斯金此前表示,这些 “带有双腿” 的微型机器人可用于修复手机电池,甚至探索人类大脑信号。而且由于可以通过皮下注射进入人体,微型机器人在生命科学领域的更多应用也值得期待。
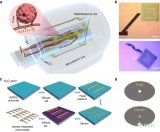
米斯金及其团队成功研发出可行走的微型机器人 “大军”,得益于一类与现有硅电子器件兼容的新型致动器(使机器人移动的部件)的发展。相关研究成果于 8 月 26 日发表在《自然》杂志(Nature)上。

(来源:Nature)
近年来,将电子器件微型化以生产细胞大小的机器人一直是人们追求的目标,得益于电子、磁性和光学系统的技术突破,单单研发一种小体积、低成本、低功耗的机器人并不难,但由于缺乏合适的微米级致动器系统,无法与当前的半导体工艺无缝集成,且无法正常响应标准电子控制信号,这一领域的发展一直受到限制。
“借助现有技术制造 100 微米大小的硅芯片并不是什么难事,我们要做的是,研发机械臂和致动器的外骨骼。” 美国康奈尔大学物理学家保罗·麦克尤恩(Paul McEuen)说。
在最新研究中,米斯金及其同事展示了一类新型电化学致动器,克服了这一技术问题。这些致动器构成了机器人的双腿,其尺寸小于 0.1 毫米,当受到激光刺激时,就会弯曲,产生行走动作。研究人员在一块 4 英寸大小的硅片上制造了超过 100 万个行走机器人,这些机器人由板载硅太阳能电池驱动。
视频 | 转圈的微型机器人
早在麦克尤恩实验室工作期间,米斯金就开发了一种将铂、钛层放在硅晶圆片的技术:当施加电压时,铂收缩而钛保持刚性,平坦的表面弯曲,弯曲的表面产生驱动机器人四肢向前移动的动力。
但这个想法在当时并不新鲜。几十年来,加州大学伯克利分校的克里斯·皮斯特(Kris Pister)等研究人员一直在谈论 “智能尘埃”——一种可以报告环境状况的微型传感器。但在开发实用版本时,为适应电池需求,“智能尘埃” 变得更大,更像 “智能砂砾”。
米斯金想办法摆脱了电池的束缚,他通过向机器人背上的微型太阳能电池板照射激光,来为它们提供能量。
“我认为这真的很酷,” 皮斯特在谈到米斯金、麦克尤恩的工作时称赞道,“他们制造了一个可以通过照射光线来控制的微型机器人,这可能会有各种有趣的应用。”
米斯金表示,这些机器人也很坚固,可以在高酸性环境和超过 200 开尔文的温度变化中生存下来,并且可以通过皮下针头注射,为探索生物环境内的应用带来了可能。
尽管这些机器人的功能目前有限,比其他游泳机器人慢,也不能感知环境,而且缺乏综合控制,但米斯金认为,与现有硅技术的良好兼容性或有助于未来更多功能的开发,他希望未来几年可以向人们展示更加实用的微型机器人。
最后,附上米斯金和麦克尤恩去年在 TED 的演讲分享。
】欢迎添加关注!文章转载请注明出处。
-
机器人
+关注
关注
206文章
27051浏览量
201431 -
电子器件
+关注
关注
2文章
533浏览量
31882
原文标题:最小微型机器人来了!细如发丝,可游走于人体探索大脑信号
文章出处:【微信号:deeptechchina,微信公众号:deeptechchina】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
高压放大器在介电弹性体折纸术软体机器人中的应用
面向狭窄腔道医疗作业的微型机器人
LabVIEW的六轴工业机器人运动控制系统
高动态人形机器人“夸父”通过OpenHarmony 3.2 Release版本兼容性测评
ROS让机器人开发更便捷,基于RK3568J+Debian系统发布!
ai人工智能机器人
开发一种用于无创和无线监测系统的自感知AI微型机器人
profinet转ethernet网关连接发那科机器人配置案例

【科普】干货!带你从0了解移动机器人(四) ——移动机器人导航技术
如何快速地让机器人投入生产
基于宽度神经网络的微型仿鱼机器人运动控制方法






 工商网监
工商网监
评论