 E14机器人安全加入光电及升降门信号分析
E14机器人安全加入光电及升降门信号分析

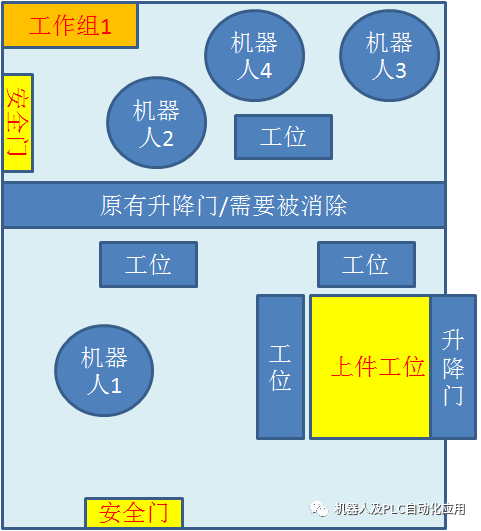
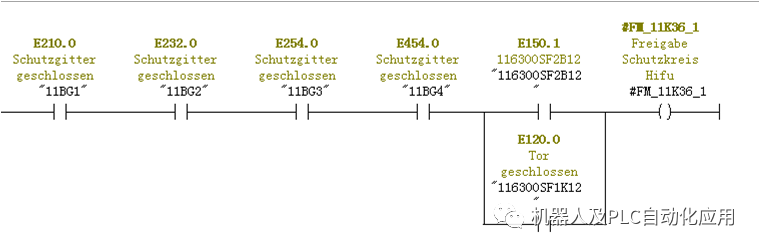
原始程序布局状态
改进后的布局状态:
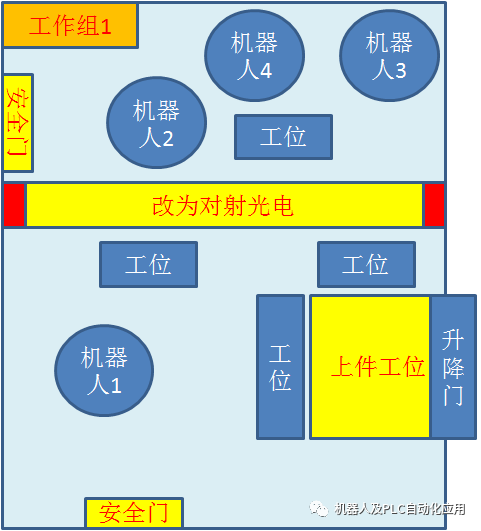
1.将机器人E14机器人安全加入光电及升降门信号.
2.机器人安全门回路加入光电和升降门信号.
3.误闯光电会引起工作组1报安全门故障.
1.将机器人E14机器人安全加入光电及升降门信号.
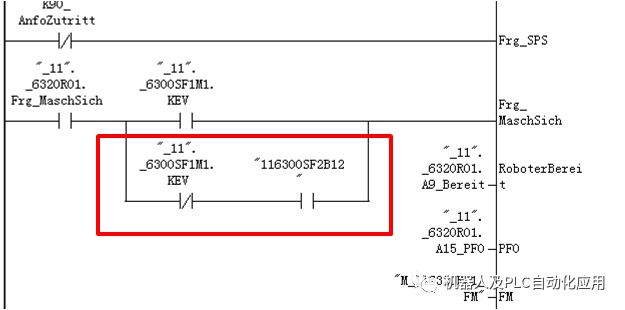
编程速度快,改动最小,影响范围小,安全系数低.
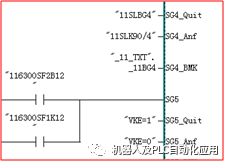
2.机器人安全门回路加入光电和升降门信号.
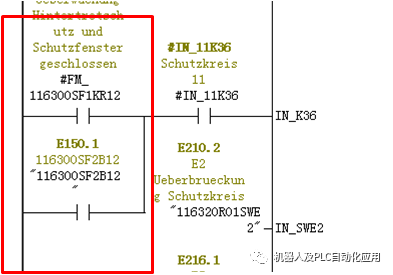
打开升降门后,如果挡光电会引起机器人2号的安全门回路断开,使机器人以安全停止1的方式停止.
相对1的解决方案,这个方案的安全系数更高,完全控制了2 号机器人,但当人员跨过新加光栅后,3号/4号机器人仍然在运动,还是有一定的安全风险.
3.误闯光电会引起工作组1报安全门故障.
并入安全门控制回路,如果开着升降门直接闯过光栅,将使整个工作组1停止产生安全门开故障.
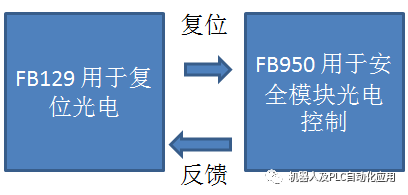
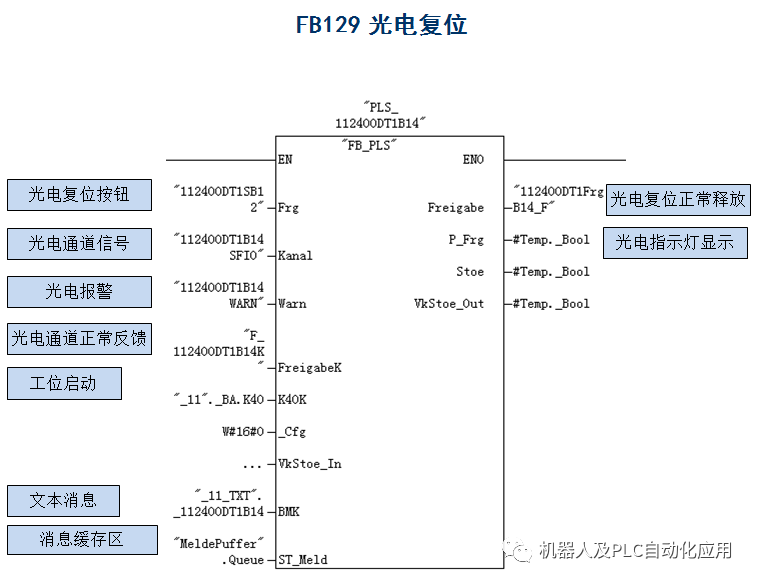
光电复位示意图:
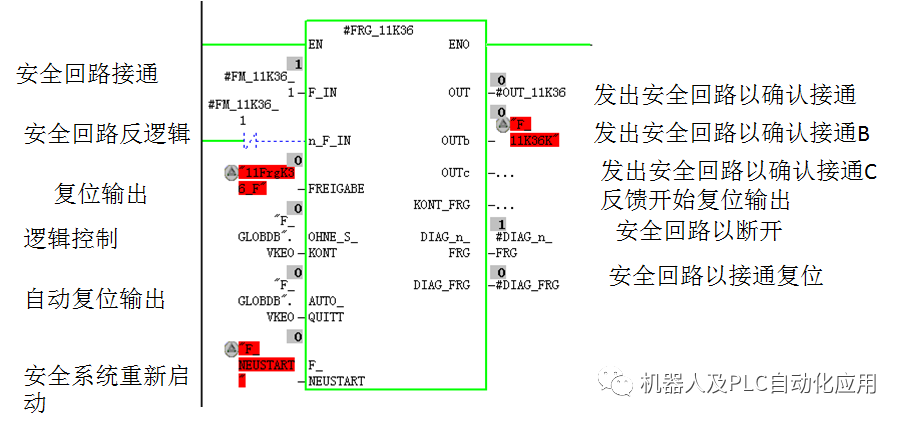
FB950接口设置
责任编辑:pj
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
213文章
31449浏览量
223672 -
光栅
+关注
关注
0文章
308浏览量
28533 -
接口设计
+关注
关注
2文章
206浏览量
30772
发布评论请先 登录
相关推荐
热点推荐
基于米尔RK3576核心板的国产割草机器人解决方案
GPIO中断引脚连接升降传感器和倾倒传感器,一旦检测到机器人被抬起或倾斜,芯片立即下达刀片急停指令,符合国内CCC安全认证要求。
4. 人机交互:国产通信与OTA升级
通过核心板集成的Wi-Fi 6
发表于 04-24 17:31
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
。有了扭矩传感器,机器人能实时检测力的大小和方向,自动调整姿态。例如,在人形机器人的腿部关节,传感器以1千赫兹的频率感知地面反作用力,瞬间调整输出扭矩,实现稳定行走和上下斜坡。2. 安全协作:碰撞即停
发表于 04-17 17:27
思必驰正式加入家用服务机器人专委会
,正式加入家用服务机器人专委会,并为白皮书编撰提供核心内容支持,为家用服务机器人突破交互瓶颈、实现场景化落地注入核心动能。
再谈低温烧结银的应用:从春晚四家机器人出镜的幕后推手说起
未来》和《立上游》:**MagicBot Z1/Gen1+MagicDog 四足,集群伴舞、多机协同,主打快速响应+低延迟+高集成。
**松延动力:《奶奶的最爱》:**E1/N2/Bumi+仿生机器人
发表于 02-17 14:07
机器人用霍尔电流传感器,能提升操作安全性么?
员安全。霍尔电流传感器作为机器人电力系统的“感知核心”,通过实时监测电流信号、精准反馈运行状态,为机器人构建全链路安全防护体系,成为提升操作

RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
、远程作业机器人、特种检测机器人· 多摄像头输入:通过多路摄像头无死角监控作业现场,实现精准操作与安全监控。· 多屏显示:将不同视角的画面、传感器数据、控制界面分别显示,帮助操作员远程精准控制。高端服务
发表于 10-29 16:41
小萝卜机器人的故事
经过我的申请,
马老师发放了,
小萝卜机器人的,
开发权限,
原来的小萝卜公司,
因为经营不善倒闭,
作为科研产品,
几个技术对此惋惜,
自掏腰包,
要让小萝卜机器人,
再生,
每次听到小萝卜说
发表于 10-23 05:24
机器人竞技幕后:磁传感器芯片激活 “精准感知力”
帮助机器人实时修正重心,大幅降低翻倒风险。
在关节运动控制上,磁传感器芯片实现 “毫米级精度保障”。以昆泰芯 KTM59 系列磁编码器的离轴应用为例,其非接触式磁信号捕捉技术,解决了传统光学编码器在
发表于 08-26 10:02
ADI安全产品如何简化不同机器人控制系统中安全机制的实现
我们将探讨各种机器人安全用例,展示ADI的安全产品如何简化不同机器人控制系统中安全机制的实现。

ADI解读机器人控制系统中的安全风险和有效安全措施 为机器人技术的未来发展筑牢安全防线
本文探讨了机器人控制系统中的安全风险和有效安全措施。文中介绍了工业安全标准,并分析了满足工业安全

工业机器人的特点
机器人是关键。工业互联网是通过端上的数据传输,经过大数据分析和云计算处理,再进行智能化决策的一整个过程,其中端的数据传输是基础。工业互联网的端包括机器人、传感器等一切线下连接端口。因此发展工业
发表于 07-26 11:22
明远智睿SSD2351开发板:语音机器人领域的变革力量
的四核1.4GHz处理器具备强劲的运算性能,能够高效处理语音机器人运行过程中的复杂任务。语音识别和合成需要大量的计算资源,该处理器可以快速对语音信号进行分析、处理和转换。在实时语音交互场景中,无论是
发表于 05-28 11:36
盘点#机器人开发平台
地瓜机器人RDK X5开发套件地瓜机器人RDK X5开发套件产品介绍 旭日5芯片10TOPs算力-电子发烧友网机器人开发套件 Kria KR260机器人开发套件 Kria KR260-
发表于 05-13 15:02
详细介绍机场智能指路机器人的工作原理
免与行人发生碰撞,为旅客提供安全、舒适的引导服务。
智能交互系统
语音识别与理解 :智能指路机器人利用先进的语音识别技术,将旅客输入的语音信号转化为文字信息。然后,通过自然语言处理算法对文字进行
发表于 05-10 18:26
【「# ROS 2智能机器人开发实践」阅读体验】机器人入门的引路书
ROS的全称:Robot Operating System 机器人操作系统
ROS的 目的 :ROS支持通用库,是通信总线,协调多个传感器
为了解决机器人里各厂商模块不通用的问题,让机器人快速开发
发表于 04-30 01:05



评论