 库卡机器人之通讯总结
库卡机器人之通讯总结

时常有人问我库卡机器人支持哪些通讯、需要什么组件等等,基于个人多年积累并借助公众号的平台来分享下个人的总结(以下内容仅针对KRC4及以上,KRC2在此不作说明):

基于以上图片内容,将库卡通讯分成四类:
1.基于以太网的现场总线:
| ProfiNet从站 | 不需要 | KUKA ProfiNetxxx |
| ProfiNet主站 | 不需要 | KUKA ProfiNetxxx |
| Ethernet/IP主站 | 不需要 | KUKA Ethernet/IP |
| Ethernet/IP从站 | 不需要 | KUKA Ethernet/IP |
| EtherCAT主站 | 主-主:EL6692/EL6695-1001 | 不需要 |
| 主-从:EK1100/其他从站 | 不需要 | |
| EtherCAT从站 | 不支持 | |
| CC-Link | HMS AB 7694网关 | 不需要 |
| CC-Link IE | HMS AB 7961网关 | 不需要 |
| Powerlink | Hilshcer NetTAP 151网关 | 不需要 |
注意:以上仅列出常用的以太网总线,对于像Varan或Sercos这种这里就不说明;
2.RS485的现场总线:
| ProfiBus主站 | 网关:EK1100+EL6731 |
不需要 |
| 网卡:CP5614 | KRC4 Profibus-CP5614 | |
| Profibu从站 | 网关:EK1100+EL6731-0010 | 不需要 |
| 网卡:CP5614 | KRC4 Profibus-CP5614 | |
| DeviceNet主站 | 网关:EK1100+EL6752 | 不需要 |
| DeviceNet从站 | 网关:EK1100+EL6752-0010 | 不需要 |
注意:从KRC4起库卡不再支持RS232串口通讯;
3.物理接线:
| 物理IO | EK1100+EL18xx/EL28xx | 不需要 |
注意:库卡有款16输入/输出的板卡,常用于compact控制柜,这里不多阐述;
4.以太网通讯:
| Modbus TCP | 不需要 | SoftPLC:基于软PLC开发 |
| Option: 已有用户自己开发的成品 | ||
| OPC DA | 不需要 | OPC Server |
| OPC UA | 不需要 | OPC UA |
| TCP/IP | 不需要 | EthernetKRL |
| 软PLC之NetCom | ||
| PC SDK | 不需要 | KUKAVar Proxy |
| Real-time | 不需要 | KUKA Robot Sensor Interface |
说明:以上为个人整理,有些并未列入,如有疑问,可以咨询;
最后总结:
由于工业产品众多,对于每家产品所支持的通讯不尽相同。 (1)对于工业现场总线而言,PLC所支持的总线通讯: -西门子支持ProfiNet、ProfiBus等; -倍福支持ProfiNet、ProfiBus、EtherCAT、Ethernet/IP、DeviceNet等; -罗克韦尔支持Ethernet/IP、DeviceNet等; -三菱支持Ethernet/IP、Profibus、DeviceNet、CC-link等; -欧姆龙支持EtherCAT、Ethernet/ip(NJ/NX系列)等; -贝加莱直接Powerlink、Profibus、ProfiNet等; -基恩士支持Ethernet/IP; -CodeSys支持ProfiNet、Ethernet/ip、EtherCAT等; (2)对于工业现场总线而言,视觉所支持的总线通讯: -基恩士支持Ethernet/ip、ProfiNet、EtherCAT、Powerlink、CC-link等; -欧姆龙支持Ethernet/ip等; -康耐视支持ProfiNet、Ethernet/IP等; -Dalsa支持ProfiNet; (3).对于OPC UA通讯来说,PLC支持: -西门子既支持Server,也支持Client; -倍福既支持Server,也支持Client; -贝加莱既支持Server,也支持Client;
-
机器人
+关注
关注
213文章
30581浏览量
219592 -
库卡
+关注
关注
0文章
83浏览量
14606
原文标题:库卡机器人之通讯总结
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
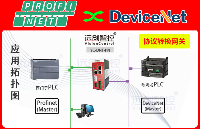
西门子S7-1200 PLC通过Profinet转DeviceNet网关与库卡机器人高效通讯实战解析
节卡机器人将携具身智能成果亮相2025世界机器人大会 面向真实场景多点落地

工业机器人的特点
库卡机器人与汇川PLC通讯——EtherNet/IP转 EtherCAT
当机器人遇上“语言障碍”:CCLINKIE转Profinet的“破冰外挂”来啦\\!
盘点#机器人开发平台
【「# ROS 2智能机器人开发实践」阅读体验】机器人入门的引路书
EtherCAT转EtherNet/IP协议转换网关实现罗克韦尔PLC与库卡机器人连接通讯的配置案例






 工商网监
工商网监
评论