 KUKA机器人电伺服焊钳力的建立过程
KUKA机器人电伺服焊钳力的建立过程

KUKA机器人组态电伺服焊钳,使用软件插件 "SERVOGUN.BASIC"
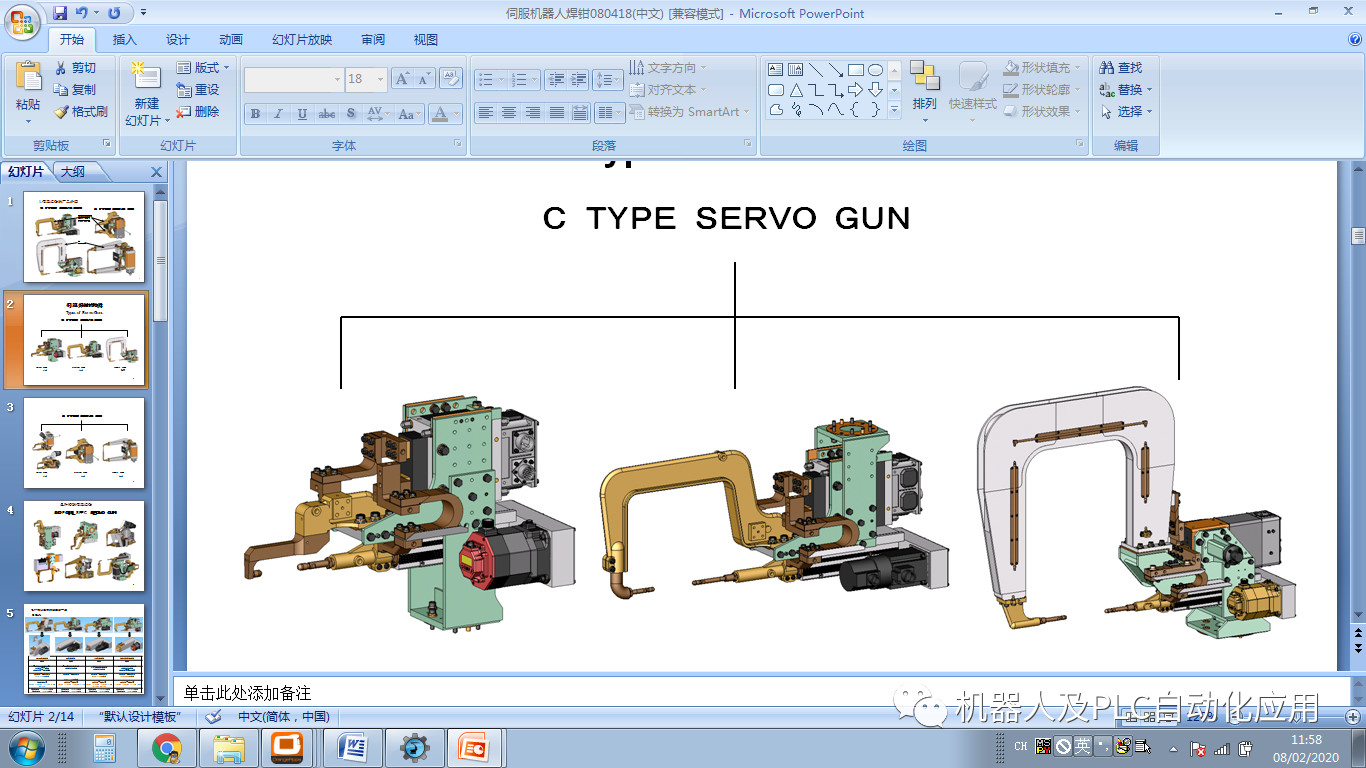
电机驱动简图:
X型焊钳
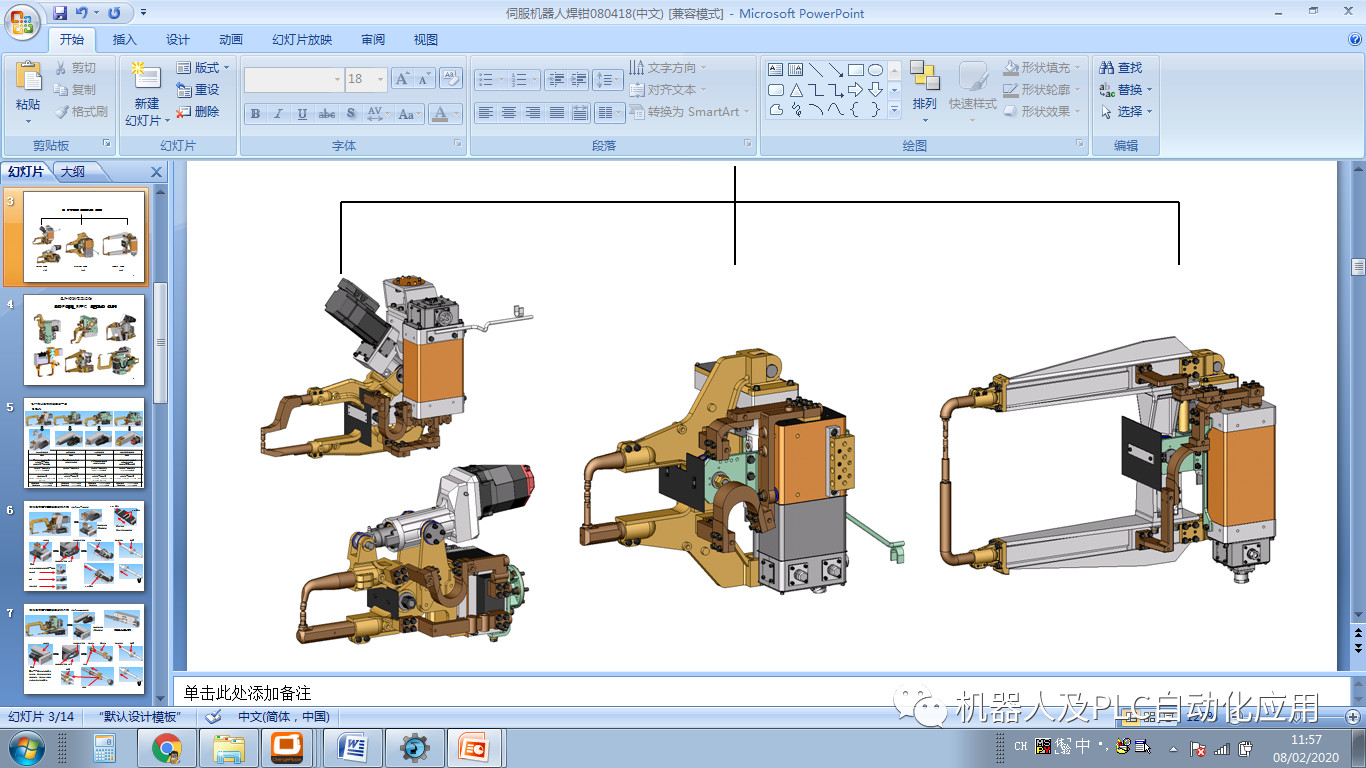
C型焊钳
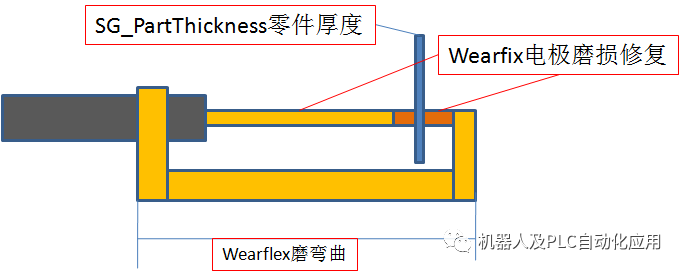
KUKA机器人常用控制变量:
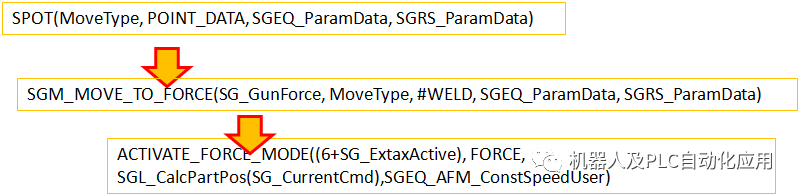
KUKA机器人控制力函数:
ACTIVATE_FORCE_MODE((6+SG_ExtaxActive), FORCE, SGL_CalcPartPos(SG_CurrentCmd),SGEQ_AFM_ConstSpeedUser)

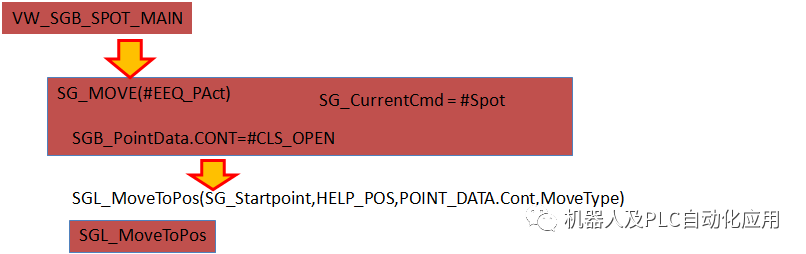
力的建立确定过程:
PTP VB=100% VE=0% ACC=100% RobWzg=1 Base=1 SPSTrig=5[1/100s] P ;焊接点
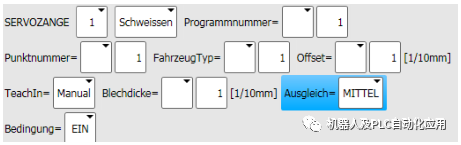
SERVOZANGE 1 Schweissen Programmnummer= 99 Punktnummer= 5154 FahrzeugTyp= 60 Offset= 1[1/10mm] TeachIn= Auto Ausgleich= MITTEL Bedingung=EINUSER焊接程序
VW_SGB_SPOT_MAIN(TRUE,#SG_PTP,P10,1,99,5154,60,1,TRUE,0,ServoGun[1].CompType,#MEDIUM,0,0,0)执行后台焊接程序
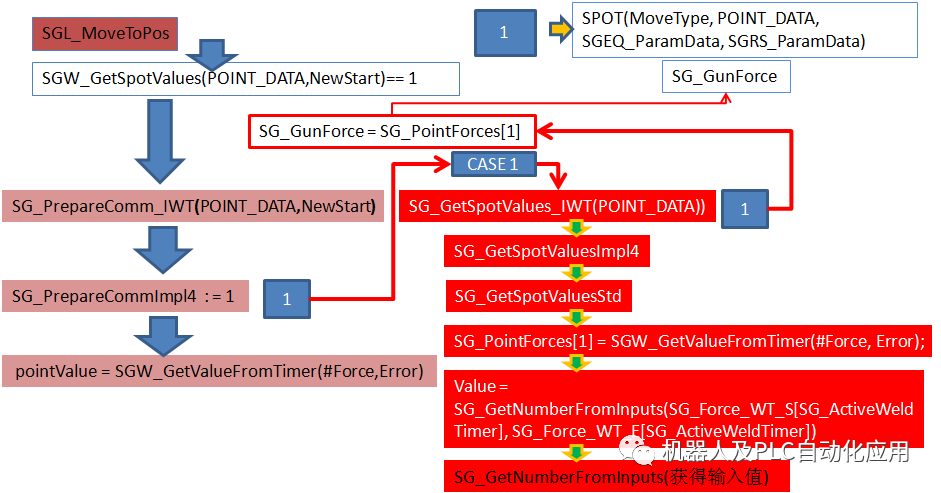
机器人的焊接控制器的通讯连接力的输入点
SG_Force_WT_S[1]=793起始字节
SG_Force_WT_E[1]=800结束字节
SG_GunForce= SG_PointForces[1]传递力值
将工作力值给入系统函数'ACTIVATE_FORCE_MODE'中实现力的控制
-
机器人
+关注
关注
213文章
31470浏览量
223699 -
焊接
+关注
关注
38文章
3590浏览量
63447 -
伺服
+关注
关注
17文章
706浏览量
43545
原文标题:KUKA 机器人电伺服焊钳力的建立过程
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
基于米尔RK3576核心板的国产割草机器人解决方案
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
为何你的机器人手臂“知觉”存在偏差?探秘力传感器的奥秘
在 VisionFive 2 上实现机器人伺服控制
再谈低温烧结银的应用:从春晚四家机器人出镜的幕后推手说起
探索RISC-V在机器人领域的潜力
高精度机器人控制的核心——基于 MYD-LT536 开发板的精密运动控制方案
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
人形机器人伺服电机驱动器新动力:高性能电容器的协同作用

集成多摩川磁性编码器的伺服电机与机器人关节设计创新
机器人竞技幕后:磁传感器芯片激活 “精准感知力”
工业机器人伺服驱动器配哪样的UPS不间断电源比较好




评论