 VASS版本的-KUKA机器人的数据提供
VASS版本的-KUKA机器人的数据提供

数据提供给KUKA机器人

从默认存档中恢复R数据
...KS_KUKA_DateienTechpaket8.2Basicxxxxxxxxxarchive.zip
机器人后台数据存储在标准档案中,必须恢复到控制器中。
标准档案可以由不同的机器人使用,并且总是以文件名ARCHIVE.ZIP存储。
要恢复,文件必须存在于U盘的根目录中

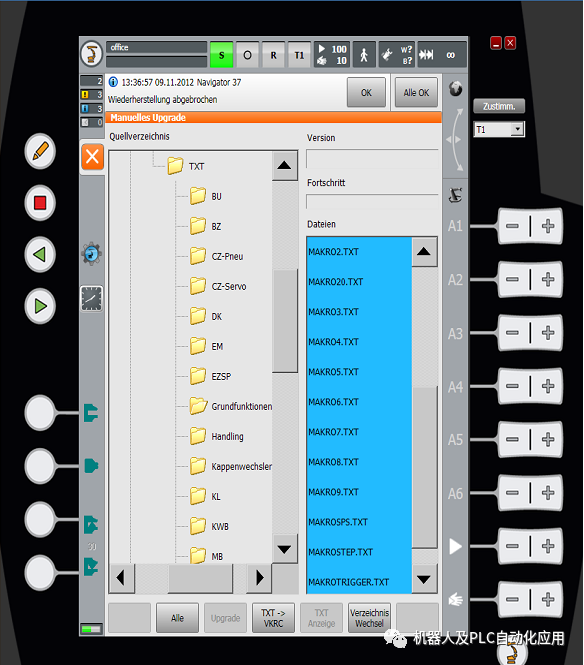
将宏导入机器人
...KS_KUKA_DateienMakrosBasicTXT
无论版本如何,robot宏都以.TXT文件的形式传递。
可以使用机器人控制器上的程序“手动更新”将宏转换为机器人上可用的软件版本。
...KS_KUKA_DateienMakrosBasicTXT
审核编辑 :李倩
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
215文章
31800浏览量
224986 -
数据存储
+关注
关注
5文章
1040浏览量
53077 -
KUKA
+关注
关注
3文章
218浏览量
17571
原文标题:VASS版本的-KUKA机器人的数据提供
文章出处:【微信号:gh_a8b121171b08,微信公众号:机器人及PLC自动化应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
机器人超声波避障测距
,包括镜面玻璃、深色家具、薄壁杂物等光学传感器难以识别的物体。在机器人导航工作中,换能器可实时采集周边环境距离信息,为设备路径规划、动态绕行、紧急停机提供精准数据支撑,提升了机器人运行
发表于 06-10 17:20
江智康养机器人
厂家进行了多次交流沟通,基于互惠互利的原则,长期战略合作,由台铃电动车在全国的上千家已下达到乡/镇区域的销售网点为附近老人提供体验与服务(销售/租赁等)以及售后服务等。(江智机器人公司重点研发,自己工厂仅仅
发表于 06-06 09:20
基于米尔RK3576核心板的国产割草机器人解决方案
割草机器人提供了一颗真正的“中国芯”。该方案不仅实现了厘米级定位与毫秒级避障,更在数据安全与供应链韧性上提供了坚实保障,助力中国智造在庭院机器人
发表于 04-24 17:31
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
“触觉神经”会怎样?
拧螺丝:只会用死力,容易滑丝或损坏螺纹。
推门:不知道门是否已开,只会继续施加扭矩,可能折断门轴。
人机协作:一旦误碰,不会卸力,直接撞伤操作员。
数据说话:高端机器人的标配
精度
发表于 04-17 17:27
Neway电机方案在机器人技术方面的优势
系统稳定性背景:工业机器人需长时间连续运行,电源故障可能导致机械臂失控、生产线停机等严重后果。Neway方案:具备过压、过流、短路三重保护功能,提供OCP(过流保护)、OTP(过温保护)信号输出,支持
发表于 03-30 09:39
NVIDIA 携手全球机器人领导者,将物理 AI 带入现实世界
新闻摘要: 全球物理 AI 领域的领导者——包括机器人“大脑”开发商、工业与手术机器人巨头、人形机器人先锋企业,如 ABB Robotics、智元机器人、Agility、CMR Sur

探索RISC-V在机器人领域的潜力
Pro则运行控制节点,通过Wi-Fi网络接收Gazebo发布的传感器信息(如激光雷达数据),并发布控制指令(速度指令)来驱动机器人模型移动和避障。
• 体验: MUSE Pi Pro的K1 CPU在处理
发表于 12-03 14:40
高精度机器人控制的核心——基于 MYD-LT536 开发板的精密运动控制方案
处理器,支持 1.8 GHz 主频,并集成2Tops NPU、G2D、VPU 4K高清视频编解码器,为复杂控制算法与视觉融合计算提供充足算力。米尔MYD-LT536开发板
在“高精度机器人控制”场景中
发表于 11-14 15:48
EtherCAT转PROFINET网关:助力KUKA机器人实现“焊”装自由!
EtherCAT转PROFINET网关:助力KUKA机器人实现“焊”装自由! 在追求极致效率与精度的现代汽车焊装车间,实现车身总拼、地板总成、四门两盖等核心工序的100%自动化,已成为衡量制造水平
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
瑞芯微RK3576 AIoT处理器处理器凭借其卓越的多屏异显与8路摄像头接入能力,为机器人领域带来革新。米尔电子MYD-LR3576开发板实测数据显示,在高负载下CPU占用仅34%,完美实现多路视觉
发表于 10-29 16:41
小萝卜机器人的故事
经过我的申请,
马老师发放了,
小萝卜机器人的,
开发权限,
原来的小萝卜公司,
因为经营不善倒闭,
作为科研产品,
几个技术对此惋惜,
自掏腰包,
要让小萝卜机器人,
再生,
每次听到小萝卜说
发表于 10-23 05:24
自制巡线解迷宫机器人(上)
模拟输入数据自动调整整个系统的动态平衡,使得机器人最终能够快速且平滑地沿着黑线移动。除此之外,该项目最大的亮点是我根据GD32VF103处理器的库函数手册等相关资料为RV-STAR开发板封装了一个类
发表于 10-20 10:39
机器人看点:宁德时代入股银河通用机器人 机器人企业扎堆赴港上市
给大家带来一些机器人的行业资讯: 宁德时代入股银河通用机器人 企查查APP数据显示北京银河通用机器人有限公司发生工商变更,宁德时代通过全资子公司宁波梅山保税港区问鼎投资有限公司入股北京
机器人竞技幕后:磁传感器芯片激活 “精准感知力”
立体空间坐标系。相较于传统陀螺仪易受振动干扰的问题,它在复杂环境下方向稳定性提升超 30%。比如 “障碍跑酷” 项目里,机器人 1 秒内需完成 7 次方向调整,该芯片提供的 0.1° 精度方位数据,能
发表于 08-26 10:02



评论