 通过采用参数模糊自整定PID控制器提高仪器温度控制系统的性能
通过采用参数模糊自整定PID控制器提高仪器温度控制系统的性能

引 言
收缩温度测定仪(以下简称仪器)是测量皮革样品在受热状态下(通常以水或甘油作为加热介质)沿长度方向发生的收缩形变达到规定值时所对应的环境温度(即为皮革收缩温度)的一种专用仪器。仪器的温度控制系统基本功能是控制加热介质的温度按照所要求的升温曲线变化。测量时,温度从开始升温(规定要求升温速度控制在3℃/min范围内),当温度升到规定值时,要求温度控制系统把温度控制在一定的范围内,仪器的温度控制系统需要实现恒速升温,恒温控制等过程。在测量中,存在仪器温度控制系统对温度的控制滞后的问题,会使皮革样品收缩形变产生较大的变化,影响测试数据的准确性。为了获取准确的数据,这就要求仪器温度控制系统具有实时性、鲁棒性和自适应性,但是在仪器中采用的可控硅温度控制系统具有时变、非线性等不利因素。针对这种问题,该文提出在仪器的温控系统中使用参数模糊自整定PID控制器,它克服了常规PID控制与模糊控制的缺点,能使系统具有较高的控制准确度,又具有较强的适应性、鲁棒性,提高了该仪器温度控制系统的动态性能和静态性能。
1、 参数模糊自整定PID控制器设计
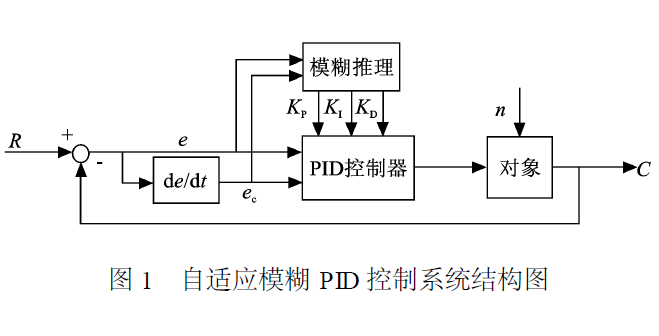
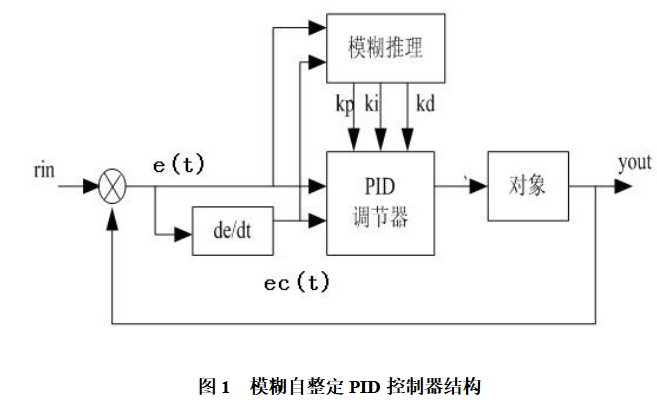
1.1 参数模糊自整定PID控制器的结构
利用模糊控制规则在线对PID控制器进行参数修整,便构成参数模糊自整定PID控制器,其工作过程为:首先,将控制量的偏差e和偏差变化率ec作为二维模糊控制器的输入变量,进行模糊化处理;其次,对模糊化后的偏差e和偏差变化率进行模糊逻辑决策(其依据模糊控制规则),应用模糊推理算法得出模糊控制器的模糊输出量;最后,解模糊化,即利用模糊控制规则在线清晰化得到精确值既为:PID控制器的3个输入参数k1,kP,kD,进行在线控制。模糊自整定PID控制器的结构如图1所示。
1.2 参数模糊自整定PID控制器的设计思想
参数模糊自整定PID控制器是一种在常规PID控制器(控制规律为式1)的基础上,应用模糊理论建立:
参数kP,k1,kD与偏差绝对值| e |和偏差变化率绝对值|ec|的二元连续函数关系见式(2)。t为采样序号;μ(t)为第t次采样时刻的控制器输出量;e(t)为第t次采样时刻的控制器输入量的偏差信号;ec(t)为第t次采样时刻的控制器的输入量偏差变化率信号;kP为比例系数;k1为积分系数;kP为微分系数。
模糊PID参数自整定的设计思想是找到PID控制器三个参数与偏差|e|和偏差变化率|ec|之间对应的模糊关系(利用式(2),可根据不同的偏差|e|和偏差变化率|ec|在线自整定参数kP,kI,kD),在运行中通过不断检测|e|和|ec|,再根据模糊控制原理对3个参数kP,kI,kD进行在线校正,以满足在不同偏差|e|和偏差变化率|ec|时,对控制器参数的不同要求,从而使被控对象有良好的动、静态性能,而且计算量小,易于单片机的实现。
一般情况下,在不同的偏差|e|和偏差变化率|ec|下,被控对象对PID控制器3个参数kP,kI,kD的自整定要求归纳如下:
(1)当|e|较大时,为使系统响应具有较好的快速跟踪性能,并避免因开始时偏差的瞬间变大,可能引起微分过饱和,而使控制作用超出许可范围,应取较大的kP和较小的kD。同时为避免系统响应出现较大的超调,需要对积分加以限制,通常取kI=0。
(2)当|e|为中等大小时,为使系统具有较小的超调,应取较小的kP,适当的kI和kD,以保证系统响应速度,其中kD的取值对系统的响应速度影响较大。
(3)当|e|较小时,为使系统具有良好的稳态性能,应取较大的kP和kI。同时为避免系统在设定值附近出现震荡,并考虑系统的抗干扰性能,当|ec|较小时,kD通常取为中等大小;当|ec|较大时,kD值可取小些。
1.3 参数模糊自整定PID控制器参数的模糊化
参数模糊自整定PID控制系统为双输入三输出的系统,模糊控制涉及的两个输入是偏差的绝对值|e|和偏差变化率的绝对值|ec|,输出量是PID控制器的3个参数kP,kI和kD。将|e|和|ec|的变化范围,根据皮革收缩温度测定仪温度控制系统的要求,定义为模糊集上的论域:|e|={0,1,2,3},|ec|={O,1,2,3);模糊集为|e|={Z,S,M,B),|ec|={Z,S,M,B}。它们分别代表零,小,中,大。隶属度函数如图2所示。
为了按皮革收缩温度测定仪温度控制系统的要求规则进行模糊推理,必须确定PID控制器参数的隶属度函数。定义它们的模糊论域为kP,kI,kD={O,1,2,3);模糊集为kP,kI,kD={z,s,M,B)。它们分别代表零,小,中,大。它们的隶属度函数如图3所示。
1.4 参数模糊自整定PID控制器模糊控制规则的建立
根据PID控制的基本原理,比例系数的kP作用在于加快系统的响应速度,提高系统的调节精度;积分系数kI的作用在于消除系统的稳态误差;微分系数kD的作用在于改善系统的动态特性。依据以上规则设计的模糊控制规则表如表1~表3所示。
采用if A and B then C反映手动控制策略的控制规则,依据表1,设计16条模糊控制规则,形式如下:
1.5 参数模糊自整定PID控制器量化因子的选择及输出信息的解模糊化
在对参数模糊自整定PID控制器输出信息模糊判决时,偏差的基本论域取为[-3,3]以及偏差所取的模糊集合的论域为[-n,…,0,…,n];偏差变化率的基本论域为[-ec,ec]以及误差所取的模糊集合的论域为[-n,…,0,…,n];其中e,ec表征误差大小的精确量,n是在0~e(0~ec)范围内连续变化的误差离散化后分成的档数(在实际控制系统中e≠n,ec≠n)。为进行模糊化处理,必须利用偏差量化因子ke和偏差变化率量化因子kec将输入量由基本论域转化到模糊集的论域,则偏差量化因子ke和偏差变化率量化因子kec计算公式:
在仪器中,由于皮革收缩温度测定仪的温度控制系统要求上升速率在0~3℃/min范围之内,为了达到要求,对不同的上升速率,偏差采用不同的量化因子。例如,当上升速率为2℃/min时,采样时间O.3 s;当上升速率为0.01℃/0.3 s时,e的基本论域取[-0.02,0.02],模糊集合的论域取n=2,e的量化因子ke=2/0.02=100,ec的基本论域取[-0.01,0.01],ec的量化因子kec=2/0.01=200。
在参数模糊自整定PID控制器原理图中,对建立的模糊控制规则要经过模糊推理才能决策出控制变量的一个模糊子集,它是一个模糊量而不能直接控制对象,还需要用合理的方法将模糊量转化为精确量(解模糊化),以便最好地发挥模糊推理结果的决策效果。在解模糊化时,采用重心法(式(4)),得到控制量“控制被控对象。
在Matlab的Simulink环境下,建立参数模糊自整定PID控制器和常规PID控制器的系统图进行系统仿真实验。参数模糊自整定PID控制器仿真曲线图和常规PID仿真曲线图如图4所示。通过系统响应曲线图,从系统的性能指标进行分析,参数模糊自整定PID控制器能有效地抑制了超调,同时也使皮革收缩温度测定仪温控系统实现无静差跟踪,其控制效果优于常规PID控制器的控制。
2、 结 语
仿真结果表明,参数模糊自整定PID控制系统提高了皮革收缩温度测定仪温度控制系统的静态性能和动态性能,使温度控制系统具有较强的鲁棒性,自适应性,有效地解决了温度控制系统的温度漂移问题且具有较强的抗干扰性能。
责任编辑:gt
-
控制器
+关注
关注
114文章
17878浏览量
195150 -
控制系统
+关注
关注
41文章
6989浏览量
114388 -
PID
+关注
关注
38文章
1505浏览量
91905
发布评论请先 登录



评论