 MAVLink学习之路04_MAVLink移植到STM32具体步骤
MAVLink学习之路04_MAVLink移植到STM32具体步骤

1写在前面
《MAVLink学习之路》前面三篇文章,可以说是一些基础知识,也是为本文做的准备工作(建议初学者先了解前面三篇文章)。
本文主要内容:
MAVLink移植主要步骤
MAVLink移植过程要点
提示:为方便广大初学者朋友尽快掌握MAVLink,我在文末提供MAVLink发送接收例程(基于STM32硬件、MDK-ARM和EWARM开发环境)。
为了方便大家平时公交、地铁、外出办事也能用手机随时随地查看该教程,本文章收录于【MAVLink学习之路】,在微信公众号回复【MAVLink学习之路】即可查看。
2
MAVLink移植主要步骤
2.1 移植说明
本文主要针对MAVLink C源代码移植进行讲述。其中,MAVLink的C源代码可以下载网上预生成的C源代码库,也可以通过生成器工具生成。
A.下载预生成C代码库
如果是使用标准MAVLink的MSG消息,则可以现在官方指定地址预先生成的C代码库。预先生成C代码库总共两个版本:
MAVLink V1版:
https://github.com/mavlink/c_library_v1
MAVLink V2版:
https://github.com/mavlink/c_library_v1
(提示:公众号不支持外链接,请复制链接到浏览器打开)
B.生成器生成C代码
如果你需要自定义MSG消息,则需要自己通过工具生成C代码,具体生成方法请参看文章:《MAVLink学习之路03_XML中定义MSG并生成C代码》
提示:
官方预生成C代码库就是通过生成器而生成的,官方提供的生成器工具、预生成C代码库不定期更新。
也就是说可能你不同时期看到的预生成库不同,不同时期的生成器及其生成的代码也有所不同。
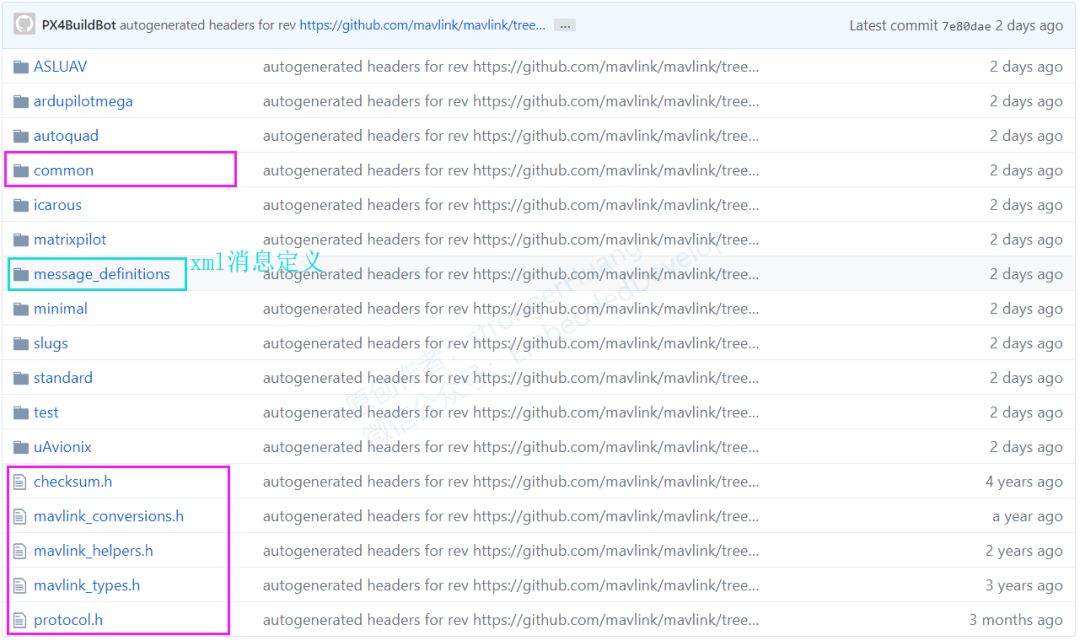
如上图,官方预生成的C代码(V1版),与通过生成器生成的代码完全一样。如common.xml通过生成器生成的C代码就和上面紫红色框出来的代码一样。当然,生成器版本也是这最新的才对。
2.2 移植主要步骤
1.下载相关工具
2.环境搭建
3.生成C代码(如果下载官方预生成代码,前面两步可以不用)
4.将C代码添加到工程
5.配置(如添加MAVLink路径、修改代码适配工程)
6.添加MAVLink发送接收(及应用)代码
步骤1, 2, 3已经在前面文章详细讲述了,本文主要讲述步骤4, 5。步骤6下一篇文章详细讲述。
3
MAVLink移植过程要点
本节主要内容讲述将C代码添加到工程,然后配置,到编译没有错误这一过程中的一些重要知识点。
3.1 代码添加到工程
代码添加到工程其实很简单,将代码拷贝工程文件下,类似如下图,添加组,添加源文件。

但是,MAVLink源代码都是.h头文件,可以不用像上面那样添加到工程。当然,添加头文件到工程的好处就是可以快速打开头文件,查找相关代码。
说这一小节是想提示大家:MAVLink的C源代码都是.h头文件。头文件只需要添加对应路径,包含头文件即可(#include "mavlink.h")。
3.2 配置
1.添加路径
Keil MDK-ARM和IAR EWARM添加路径这项内容我就不在这里详细讲述了,不会的朋友可以参看看我的文章:
Keil MDK-ARM系列教程(一)_新建软件工程详细过程
IAR EWARM系列教程(一)_新建软件工程详细过程
3.3 修改代码
这小节内容可以参看网上一篇博文:
https://www.cnblogs.com/lovechen/p/5809709.html
那篇文章讲述的很多,我讲一下重点:它修改的代码是针对老版本主要需要修改两个地方。
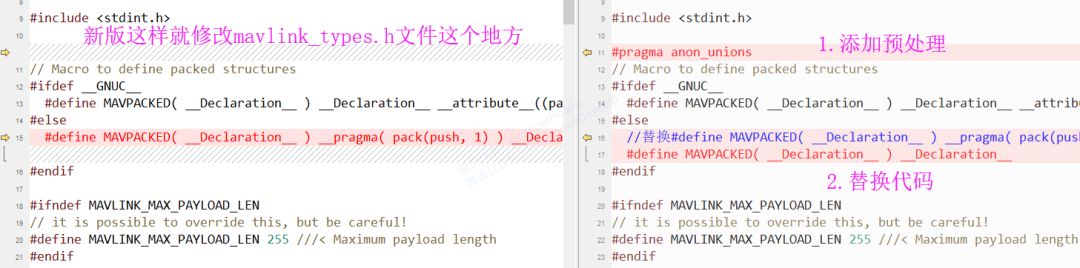
而且新版本MAVLink生成器已经优化了一个项,也就是只有一个地方需要修改:修改mavlink_types.h.
1.针对Keil MDK-ARM
2.针对IAR EWARM
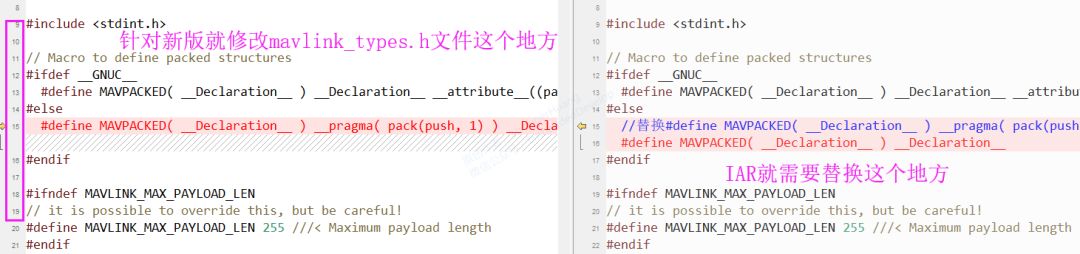
替换代码:#define MAVPACKED( __Declaration__ ) __Declaration__
那篇文章针对的是老版MAVLink还需要修改一个const的地方,我这里就不说了(新来的建议用新版的)。
为什么这里要修改呢?
原因在于编译器的差异导致的。
3.4 补充知识点
1.#pragma anon_unions
keil中默认是不支持匿名结构体的,需要编译指令#pragma anon_unions指名。
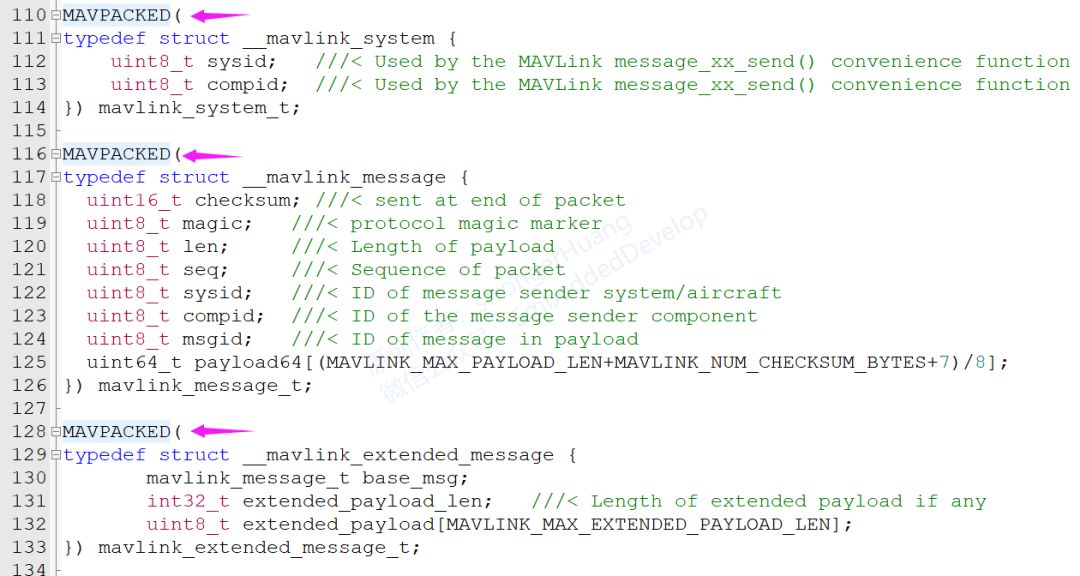
2.MAVPACKED
如果不修改代码,直接编译,发现有许多错误,原因都来自MAVPACKED。结合修改的内容,再看下图,有什么启发没有。
4
源代码下载
地址:
https://pan.baidu.com/s/1xraErAnmL-BN9CMwE6aQ-A
密码:cusq
-
STM32
+关注
关注
2312文章
11189浏览量
374547 -
C代码
+关注
关注
1文章
90浏览量
15227 -
mavlink
+关注
关注
0文章
9浏览量
2777
发布评论请先 登录
驱动之路#20:Pinctrl 在手,引脚复用很顺手

什么样的智能体才能称为具身智能?

如何在Vivado上仿真蜂鸟SOC,仿真NucleiStudio编译好的程序
确定谐波检测设备核心误差要求的步骤有哪些?
数据滤波算法的具体实现步骤是怎样的?
请问STM32如何移植Audio框架?
嵌入式工程师的进阶之路
铝丝键合的具体步骤
机智云配网教程第三期:单片机代码移植实战

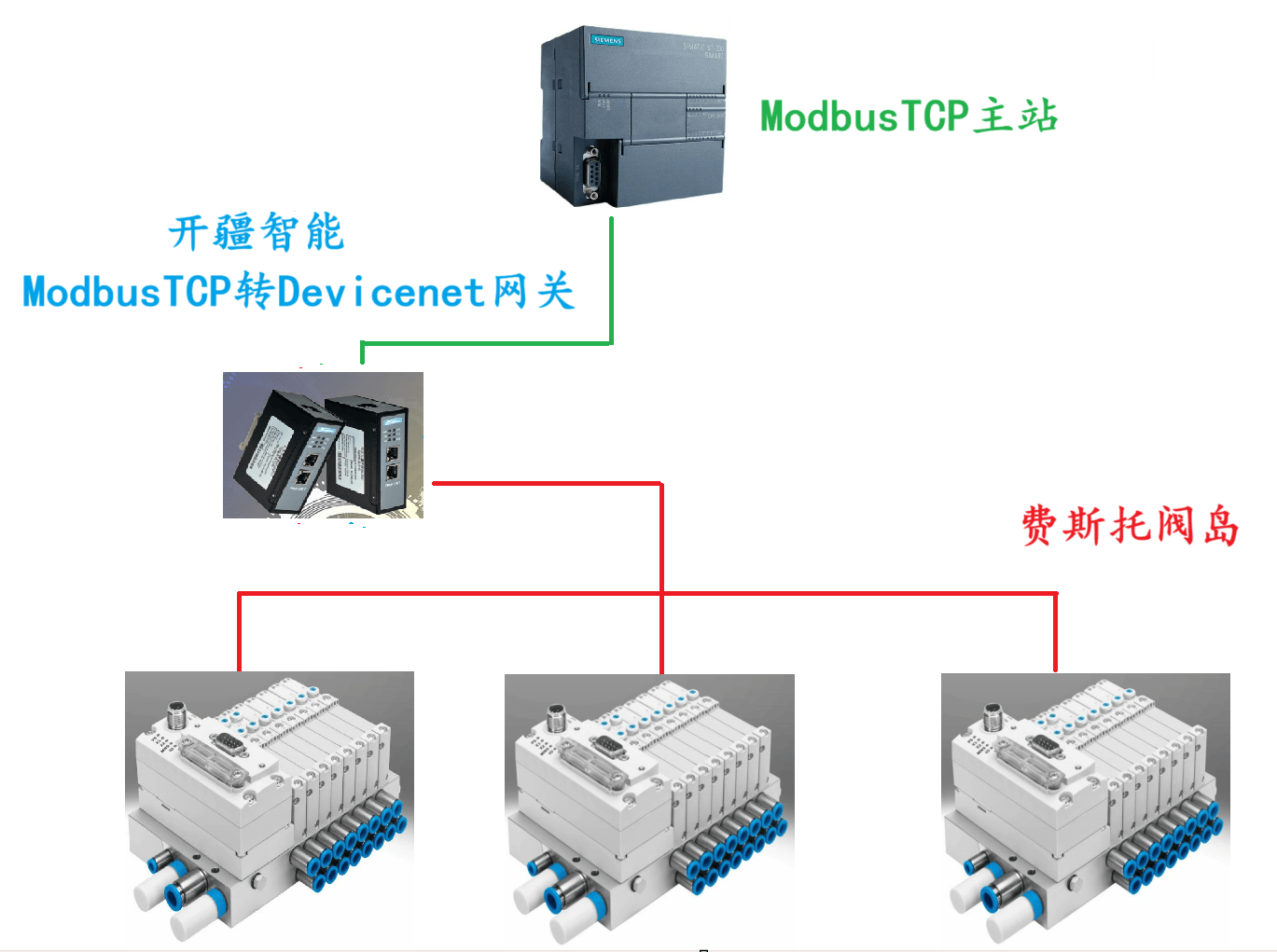
开疆智能Devicenet转ModbusTCP网关连接费斯托阀岛配置案例
STM32与机智云连接实现步骤与技巧(下篇):机智云代码移植与优化
STM32与机智云连接实现步骤与技巧(上篇)
零死角玩转STM32——系统篇
打开FSP配置器界面的具体步骤



评论