 如何略微了解量子定位
如何略微了解量子定位

基于量子定位导航系统原理,设计并分析了基于3颗卫星的星基量子定位导航系统的测距与定位过程,包括星地光链路的建立、量子纠缠光的发射与接收、到达时间差的获取、量子定位导航系统的测距,以及用户坐标的计算与导航,并对量子定位导航系统中的每个过程的实现进行了详细的阐述。
全球定位系统(Global Positioning System,GPS)是通过测量用户接收机接收到卫星星历信号的传播时间,计算出卫星与用户之间的距离。由于卫星与用户之间的时钟无法完全同步,存在钟差,用户利用该方法需获取到4颗卫星与自身的距离,再根据距离与坐标的关系,联立方程组,解算出用户的空间坐标,实现对用户的定位[1]。量子定位导航系统(Quantum Positioning System,QPS)是在GPS的基础上,利用具有量子纠缠特性的纠缠光取代了电磁波,通过测量相互关联的两束纠缠光的到达时间差(Time Difference Of Arrival,TDOA),再根据获取的TDOA解算出卫星与用户的距离以及用户的空间坐标[2]。另外,纠缠光的纠缠度、带宽、光谱、功率以及脉冲中光子数都会影响QPS的精度,光子数越多,QPS的定位精度越高[3]。
根据纠缠光子对发生器在卫星端还是地面端的不同,可以将QPS分为星基(satellite-based)QPS和地基(earth-based)QPS。作者所在研究小组提出了基于3颗卫星的QPS[4],利用3颗量子卫星实现对用户的定位。当其工作于星基模式时,卫星上的纠缠光子对发生器发射两束纠缠光,其中一束沿星地光链路到达用户,并从用户处反射回卫星,被卫星上的一个单光子探测器接收;另一束直接发射向卫星上的另一个单光子探测器,完成纠缠光子对的发射与接收。此时卫星内部直接发射向单光子探测器的纠缠光一直在卫星内部,利用两路纠缠光的TDOA计算出两路纠缠光的光程差就是卫星与地面的距离的2倍。根据3颗卫星得到的3个TDOA,分别计算出3颗卫星到用户的距离,通过联立解算获得的3个距离方程,计算用户的空间坐标。
本文基于对3颗卫星的星基QPS的测距与定位完整过程的分析,进行了系统结构的设计。首先在星地之间建立星地光链路;之后针对卫星发射的量子纠缠光,分别接收沿着星地光链路发射向用户,再沿原路返回卫星,被单光子探测器接收的信号光,以及直接被单光子探测器接收的闲置光。通过符合计数,再采用最小二乘法进行数据拟合,获取到信号光和闲置光的TDOA,最后根据3颗卫星发射的纠缠光获取到的TDOA联立方程组,解算出卫星到用户的距离和用户空间坐标,并通过对用户的不间断定位,获取用户的运动轨迹,实现对用户的导航。
本文结构如下:第1节为星地光链路的建立;第2节为纠缠光TDOA的获取;第3节为基于TDOA的量子测距、定位与导航;第4节为结论。
1星地光链路的建立
星基QPS的测距与定位过程可以分成2个部分:星地光链路的建立,以及利用量子纠缠光动态通信进行的导航定位。星地光链路的建立是为量子纠缠光信号在卫星与用户之间传播提供精准的光链路,包括信标光发射、捕获、跟踪和瞄准4个过程,这4个子过程都是通过捕获、跟踪及瞄准(Acquisition Tracking and Pointing,ATP)系统实现。基于量子纠缠光的测距、定位与导航是根据建立好的星地光链路,采用量子纠缠光动态通信进行测距、定位和导航,其工作过程分为量子纠缠光的发射与接收、纠缠光TDOA的获取,以及基于TDOA的量子测距、定位与导航3个部分。
星地光链路的建立过程如图1所示,其中,上半部分为卫星端ATP系统,下半部分为地面端ATP系统,图中绿色实线及区域代表信标光光束,蓝色虚线代表电信号。ATP系统由信标光模块、粗跟踪模块、精跟踪模块以及超前瞄准模块四部分构成。其中,粗跟踪模块由光学天线、二维转台、粗跟踪探测器以及粗跟踪控制器组成[5];精跟踪模块由快速反射镜(Fast Steering Mirror,FSM)、精跟踪探测器和精跟踪控制器组成[5]。
卫星端与地面端通过各自的信标光发射器相互发射信标光,利用ATP系统对对方发射的信标光实施捕获、跟踪和瞄准,建立起双向瞄准的星地光链路[6]。其具体建立的过程为:首先,地面端作为信标光的发射方,卫星端作为捕获方。地面端根据卫星的轨道信息,计算出卫星经过地面端所在位置上空的轨道及其时间段,随后转动粗跟踪模块中的二维转台,使其视轴指向此时经过地面端上空卫星的不确定区域,随后令信标光发射器发射一束波长为800~900nm,散角较宽的信标光1a,覆盖卫星端所在区域;卫星端同样依据星历表或GPS计算用户的大致位置,通过二维转台调整光学天线的方位角和俯仰角,将粗跟踪探测器的视轴指向用户。随后卫星端光学天线将对用户所在的不确定区域进行扫描,并启动粗跟踪控制器调整信标光的扫描模式,通过扫描,地面端发射的上行信标光1a进入了卫星端粗跟踪探测器视场,完成捕获过程。之后卫星端转入粗跟踪阶段,实现大范围跟踪信标光。粗跟踪探测器探测上行信标光光轴的变化,主要是通过处理入射信标光光束在探测阵面上的光斑位置表征地面端方向。然后粗跟踪控制器根据光轴变化量即光斑数据采用控制算法计算控制量,驱动二维转台电机,完成对光学天线指向的调整,将上行信标光引入精跟踪模块视场中,随后进入精跟踪阶段。FSM先对经由光学天线输出并经过准直透镜处理的上行信标光3a进行反射,通过精跟踪探测器的镜头后进入精跟踪探测器,并在探测器上形成光斑。精跟踪探测器将光斑信号转换成在探测器上分布的电流信号,经由模数转换形成数字的光斑能量信号。然后对分布的光斑能量信号进行采集,计算获取精跟踪角度误差,并将误差信号S3a传递给精跟踪控制器。精跟踪控制器经过一定的控制算法计算输出控制信号S4a,控制FSM偏转一定角度,使上行信标光能够精确对准精跟踪探测器中心,从而实现精跟踪过程,达到入射光轴与主光学天线光轴精确对准。系统的粗跟踪精度ΔθF=±0.5mrad[5],精跟踪精度ΔθC=±2μrad[7]。当卫星端发射下行信标光后,地面端也先后工作在与上行信标光类似的捕获、跟踪和瞄准过程,此时,卫星端与地面端均处在跟踪状态。当星地两端完成双向跟踪,就实现了星地光链路的建立与维持,可以进行下一步的量子纠缠光的发射与接收。
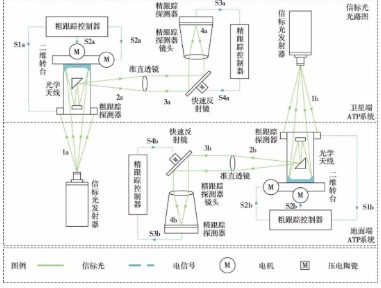
图1星地光链路的建立过程
2纠缠光TDOA的获取
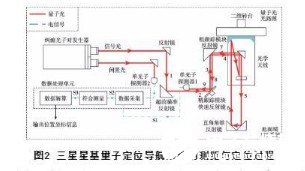
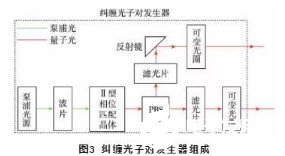
在所建立的已经精确对准的星地光链路上,基于量子纠缠光进行测距与定位是整个QPS工作的关键。一组三星星基QPS的测距与定位过程如图2所示,其中,红色实线代表量子纠缠光光束,蓝色虚线代表电信号,其过程主要由纠缠光子对发生器、ATP系统、单光子探测器、数据处理单元四部分完成。其中,纠缠光子对发生器的组成如图3所示,纠缠光子对发生器由泵浦光源、波片、II型相位匹配晶体、偏振分束器(Polarizing Beam Splitter,PBS)、滤光片、反射镜及可变光圈组成[8];数据处理单元由数据采集、符合测量和数据解算3个模块组成。下面通过量子纠缠光子对的发射与接收、纠缠光TDOA的求解,以及基于TDOA的量子测距、定位与导航来具体阐述基于量子纠缠光的测距与定位过程。
1)量子纠缠光子对的发射与接收
图2中的红线标注的为量子纠缠光子对的发射与接收过程:卫星端和地面端的ATP系统利用信标光建立星地光链路,卫星端开始进行量子纠缠光的发射与接收。发射过程为:纠缠光子对发生器产生相互关联的信号光与闲置光,其中,信号光入射至超前瞄准反射镜,超前瞄准模块通过计算星地端相对运动产生的瞬时角度偏差,驱动超前瞄准反射镜调整一个角度,从而实现对信号光角度偏差的补偿;随后信号光进入精跟踪模块的FSM,利用FSM反射至粗跟踪模块的反射镜中,再反射至光学天线;光学天线将信号光7发射至地面端的角锥反射器中,从而完成量子纠缠光的精确发射。接收过程为:纠缠光子对中的信号光经由地面角锥反射器,原路径返回卫星端ATP系统,先从光学天线进入粗跟踪模块反射镜反射至精跟踪模块的FSM上,入射至单光子探测器1;闲置光在纠缠光子对发生器发出后,经反射镜反射后直接进入单光子探测器2中被接收。
2)纠缠光TDOA的计算
纠缠光TDOA的计算过程是在图2中的数据处理单元中完成。纠缠光子对发生器产生的纠缠光子对同时产生一组信号光子和闲置光子,其中,闲置光直接发射向单光子探测器2;而信号光通过星地光链路发射向地面,地面再反射回卫星,由单光子探测器1接收。信号光子经过了2次卫星与地面之间的距离,它到达探测器1的时间与闲置光到达探测器2的时间之间存在的时间差,称为TDOAΔt。通过对所获的纠缠光子对信号数据的处理来获得这个TDOA,并将其与光速相乘得到信号光与闲置光传播的光程差,计算出卫星与地面用户的距离。
为了获得这个TDOA,需要首先利用数据采集模块采集2个单光子探测器输出的脉冲信号S1,生成两路具有时间戳标记的时间序列数据S2,闲置光时间序列CH2以及含有与其存在TDOAΔt的信号光时间序列CH1,并对所获得的时间序列CH2和CH1进行符合测量,通过数据拟合得到所需要的TDOAΔt的值。提出了一种基于软件完成的符合测量及其数据拟合获取TDOA的过程,整个过程如图4所示,包括符合计算、归一化处理和数据拟合3个部分。
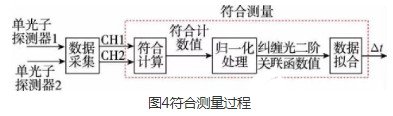
图4符合测量过程
符合计算软件实现的思想为:通过对获得的两路时间序列中的CH2给定不同的延时,对所获得的两路时间序列的CH1与每个给定延时下的CH2分别进行符合计数,得到一系列的符合计数值。当给定CH2的延时与TDOA相等时,CH1与CH2上的所有脉冲点都能完成符合计数,此时符合计数值达到最大。由于纠缠光的二阶关联函数符合计数值与时延之间的关系,所以它的最大值所对应的延时就是纠缠光的TDOAΔt。根据给定的不同的时延所获得的相应的符合计数值,可以作出一条由给定的不同延时下的符合计数值组成的离散点曲线。因为关心的是获得最大符合计数值下的时延,而最大符合计数值的多少不重要,所以通过对所获得的符合计数值进行归一化处理,将符合计算得到的符合计数值的最大值归一化为1,与实际得到的符合计数值得多少无关。最后通过对归一化处理得到的离散的纠缠光二阶关联函数值进行数据拟合,得到最大值所对应的延时就是纠缠光的到达时间。
软件实现符合测量过程中涉及3个参数:采集时间、符合门宽和延时增加步长。采集时间是数据采集模块采集来自2个单光子探测器的电脉冲信号所用的时间;符合门宽是被视为同时到达的2个单光子到达的最大时间差;延时增加步长是相邻2次符合计数之间给定的延时变化量。图5是符合计数示意图,它是在一个符合门宽时间范围内,将时间序列CH1和CH2上同时存在脉冲的情况记为一次符合,并将符合计数值加1[9]。符合测量的具体过程为:在预计的一个延时的范围内,一般为0~10ms,以1ps为延时增加步长,将延时范围除以延时增加步长,得出最大循环次数;人为利用软件给序列CH2加一个初始延时,初始延时一般为0,并对CH1和延时后的序列CH2进行符合计数,得到在给定的延时下的符合计数值。每次得到一个符合计数值之后,将施加的延时增加一个延时增加步长,再次符合计数得到又一个符合计数值,直到达到最大循环次数N,完成符合计算过程,得到在不同延时τj(j=1,2,3,…,N)下对应的符合计数值n(τj)。
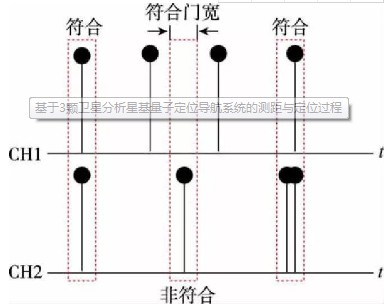
图5符合计数示意图

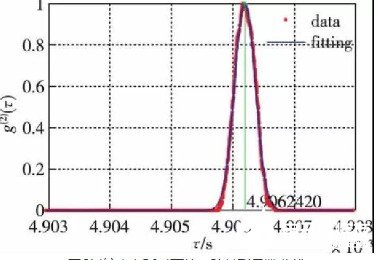
根据式(5),可以计算出向量A的值,然后,将所求出的A值与向量A中每一项-(Δt)2/q2、2Δt/q2和-1/q2值相对应,由此计算出参数Δt和q的值,将其代入式(3),得到纠缠光在延时τ下的一个二阶关联函数g(2)(τ)。此时,根据不同的时间延时τ,可以做出一个二阶关联函数曲线,该曲线上二阶关联函数的峰值对应的横坐标就是纠缠光的TDOA。
图6是通过符合测量得到的纠缠光在延时τ下的一个二阶关联函数曲线,其中,红色点为归一化后的离散样本点,蓝色实线为拟合和的二阶关联函数曲线,绿色实线对应拟合曲线的峰值点坐标,通过该曲线获得的纠缠光TDOA为Δt=4.9062420×10-3s。
在纠缠光TDOA获取的过程中,采集时间、符合门宽和延时增加步长3个参数会对纠缠光TDOA测量精度产生影响,具体的影响如下:1)采集时间越大,采集到单光子脉冲就越多,符合测量和数据拟合得到的TDOA就越接近真实值,在设计的系统中,采集时间等于10ms时,系统就已经达到最高精度,且采集时间越长,数据处理所占用的系统资源越多,计算时间越慢;2)符合门宽过大,符合计数得到的离散样本点的值在一段延时范围内均达到最大值,对这样的样本点拟合出的函数,最终得到的纠缠光TDOA是不够准确的;符合门宽过小,符合计数得到的离散样本点在峰值附近相对较稀疏,对它们数据拟合后得到的纠缠光TDOA也会存在较大误差,一般将其选取为0.2ns;3)延时增加步长s越小,则符合计数得到的离散样本点越密集,最终拟合出的纠缠光在延时τ下的二阶关联函数越接近实际情况,获取到的纠缠光TDOA精度越高。
3基于到达时间差的量子测距、定位与导航
通过符合测量及其数据拟合所得到卫星Ri(i=1,2,3)发射的纠缠光的TDOAΔti,由纠缠光TDOA与卫星到用户距离之间的关系,可以得到卫星到用户之间的距离为
设3颗量子卫星的空间坐标分别为:R1(x1,y1,z1),R2(x2,y2,z2)和R3(x2,y2,z2),地面用户的空间坐标为(x,y,z)。基于TDOA所获得的卫星与用户之间距离差的计算公式cΔti/2,以及卫星与用户之间距离差与用户坐标之间的关系,可以得到每一颗卫星与用户之间距离与地面用户坐标之间的关系公式:通过分别测量3颗卫星发射的纠缠光的TDOA,可以得到一个含有3个不同时间差以及用户空间坐标的方程组为
(7)
联立求解方程式(7),可获得用户的空间坐标(x,y,z)。
QPS通过超前瞄准模块在运动的卫星与用户之间维持星地光链路,实现对用户的不间断定位,获取到用户的连续运动轨迹,实现QPS的导航功能。
-
全球定位系统
+关注
关注
0文章
23浏览量
11160 -
导航
+关注
关注
7文章
592浏览量
44123 -
量子
+关注
关注
0文章
502浏览量
26580
发布评论请先 登录



评论