 爬行式水陆两用机器人用途多
爬行式水陆两用机器人用途多

现在各国都在深入机器人种类,据外媒报道称,美国海军陆战队正在开发一次性机器人原型,目标是清除海滩碎波带的地雷。
据悉,这种机器人叫做爬行式遥控水陆两用突破器(简称CRAB),能够通过远程遥控或者自主操作的方式,使用地雷、耕作机、耙子来引爆和清除爆炸物,以及清除水下障碍物。
报道中还提到,这些机器人可以从沿岸的公用艇上放下来,然后自行爬行到海滩上,以寻找并清除地雷和障碍物。如果它被销毁,那么只会丢失机械。
目前美国海军还在继续深入研究这种智能机器人,因为它还仅仅在非常浅的水域工作(碎波带和海滩内提供远程或自主的爆炸和非爆炸性障碍物清除能力),如果想要扩大它的行程,依然需要更多的技术条件。
配图
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
214文章
31659浏览量
224574
发布评论请先 登录
相关推荐
热点推荐
人形机器人关节扭矩传感器的详细应用场景及解决方案
质量与质心,动态调整控制增益。
典型需求:多轴解耦能力强,长期稳定性好(无漂移)。
康复与助行机器人(外骨骼类)
场景描述:辅助下肢无力患者行走,需准确感知患者主动发力意图。
传感器作用:检测人机交互
发表于 05-20 17:40
基于米尔RK3576核心板的国产割草机器人解决方案
在智慧庭院与机器人产业高速发展的今天,割草机器人正经历从“随机碰撞式”向“规划自主式”的深刻变革。与此同时,在国产化替代、供应链自主可控的产业政策推动下,国内整机厂商对高算力、低功耗、
发表于 04-24 17:31
杰和科技亮相机器人大会,边缘AI驱动机器人场景落地
、多传感器数据融合、工业级标准的全面支持等行业前沿需求热点,带来覆盖全场景机器人的嵌入式控制器解决方案,精准对接机器人产业链上下游需求,展示杰和在机

小型自重构机器人能不能帮忙做一个?
。
---
# 五、变形模式(你能实现的)
你做出来能直接变这些形状:
- 直线爬行
- U 型
- L 型
- 环形
- 多模块拼接成长蛇
- 自动散开、重新组合
这就是**真正的自重构机器人
发表于 02-21 19:24
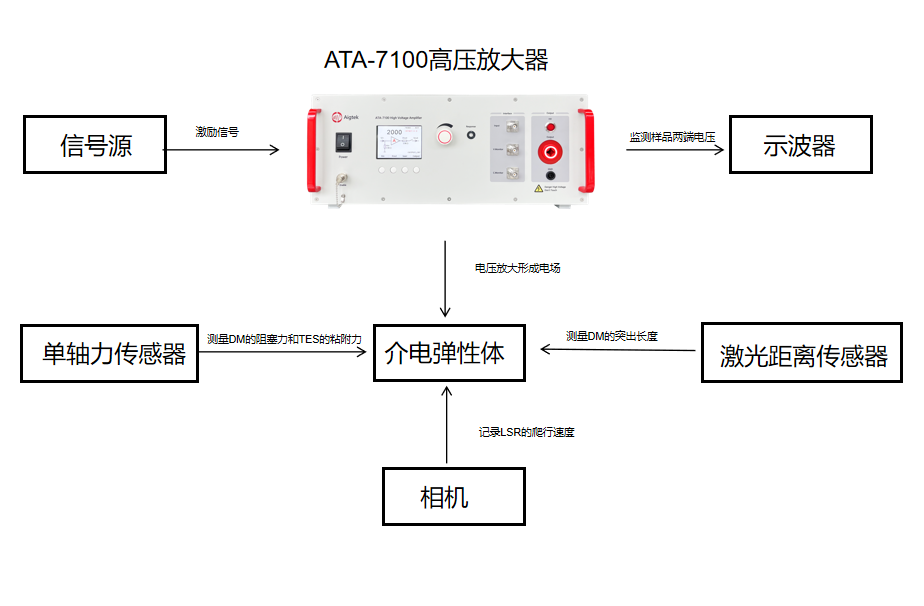
高压放大器在介电弹性体制成的软机器人研究中的应用
进行两栖运动、攀爬和负重爬行。开发了一种高性能的摩擦电仿生机器人系统,用于驱动和控制电响应软体机器人。爬行
高精度机器人控制的核心——基于 MYD-LT536 开发板的精密运动控制方案
,MYD-LT536 具备以下突出优势:
1. 高算力与实时性兼顾
四核 Cortex-A55 架构可并行运行多线程控制任务,满足多轴机器人同步控制与动态补偿算法的实时计算需求;
T536 AMP多核
发表于 11-14 15:48
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
瑞芯微RK3576 AIoT处理器处理器凭借其卓越的多屏异显与8路摄像头接入能力,为机器人领域带来革新。米尔电子MYD-LR3576开发板实测数据显示,在高负载下CPU占用仅34%,完美实现多路视觉
发表于 10-29 16:41
小萝卜机器人的故事
经过我的申请,
马老师发放了,
小萝卜机器人的,
开发权限,
原来的小萝卜公司,
因为经营不善倒闭,
作为科研产品,
几个技术对此惋惜,
自掏腰包,
要让小萝卜机器人,
再生,
每次听到小萝卜说
发表于 10-23 05:24
亚马逊计划用机器人取代美国60万名工人
据《纽约时报》报道,亚马逊多年来不断在仓库引入更先进的机器人,并一直声称不会用机器人取代员工或原本应由人类承担的岗位。然而,该报援引泄露的公司内部文件及相关访谈显示,亚马逊希望在 2033 年前用
自制巡线解迷宫机器人(上)
能提供较为稳定的扭矩和速度输出,从而使得机器人的巡线过程变得更加高效。
电机驱动模块我选用的是智能小车里面最常用的TB6612FNG,它相较于其他模块的最大优点在于其在驱动两路大电流电机的同时还能保持
发表于 10-20 10:39
集成多摩川磁性编码器的伺服电机与机器人关节设计创新
起着决定性作用。今天,我们就来聊聊集成多摩川磁性编码器的伺服电机与机器人关节的设计创新,这可是机器人领域里的一项大突破!
机器人竞技幕后:磁传感器芯片激活 “精准感知力”
帮助机器人实时修正重心,大幅降低翻倒风险。
在关节运动控制上,磁传感器芯片实现 “毫米级精度保障”。以昆泰芯 KTM59 系列磁编码器的离轴应用为例,其非接触式磁信号捕捉技术,解决了传统光学编码器在
发表于 08-26 10:02
介电弹性体软机器人研究:高压放大器的应用实践
进行两栖运动、攀爬和负重爬行。开发了一种高性能的摩擦电仿生机器人系统,用于驱动和控制电响应软体机器人。爬行

工业机器人的特点
的基础,也是三者的实现终端,智能制造装备产业包括高档数控机床、工业机器人、自动化成套生产线、精密仪器仪表、智能传感器、汽车自动化焊接线、柔性自动化生产线、智能农机、3D 打印机等领域。而智能制造装备中工业
发表于 07-26 11:22



评论