 2轮自平衡机器人的制作
2轮自平衡机器人的制作

步骤1:购物清单
乐高(兼容)零件
直流电动机
Arduino Clone
MPU-6050
Motor Shield L298N
电池
跳线20cm母对公
JST连接器
*车轮
*(其中一个我以前建立的配置中,我设法烧掉了其中一个电动机,
因此我放弃了电动机,保持了车轮的位置)
2个扎带
步骤2:使用一些乐高(兼容)零件构建框架



这是一个非常简单的任务。我相信,如果乐高(Lego)开始制造套件(像这样),将砖块与最新的电子产品混合在一起,它们的销售(现在正在做)会做得更好。
无论如何,请注意,我将Arduino Uno的Lego平台移到了更高的位置,以改善反摆的效果。
要安装马达,请在底座上开4个孔,并用一条扎带(每个马达)
我加了一点胶水,以确保电机不会移动。
第3步:接线图和编码
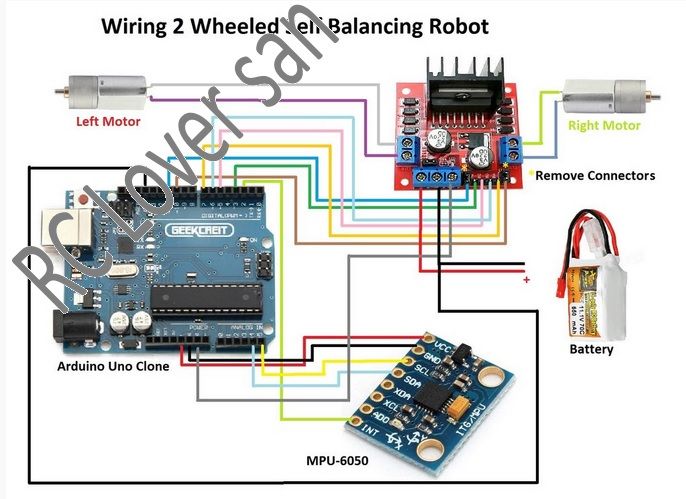
按照上面的示意图,连接到Arduino Uno克隆,电动机屏蔽罩L298N,MPU-6050和电池。
关于编码,您得益于Kalman滤波器和PID(比例,积分和微分)控制,可以轻松地在Internet上找到该项目的代码,从而提高了机器人的稳定性。
如果找不到它, ,请订阅我的YouTube频道,我会立即发送给您。
步骤4:
恭喜,您已经构建了两轮自平衡机器人!
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
213文章
31449浏览量
223672
发布评论请先 登录
相关推荐
热点推荐
再谈低温烧结银的应用:从春晚四家机器人出镜的幕后推手说起
科技:《武 BOT》:H2人形机器人31个高精度关节、单臂7自由度,完成醉拳、双截棍、舞剑,同步误差**< 0.1秒;核心是高功率密度伺服电机+高速控制+**强散热。
**魔法原子:《智造
发表于 02-17 14:07
机器人看点:智元机器人公司完成股改 湃特纳机器人完成数千万元A轮融资
变更,企业名称变更为智元创新(上海)科技股份有限公司,类型由由有限责任公司(外商投资、非独资)变更为股份有限公司(港澳台投资、未上市)。 业界分析人士认为这是智元机器人在为上市做准备。 湃特纳机器人完成数千万元A轮融资 日前
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
。· 利用开发板上的MIPI CSI1和CSI2接口,完整接入8路摄像头,实现了所有通道的视频预览与采集,为机器人构建了全方位的视觉感知系统。卓越性能表现:· CPU占用率:34%· DDR占用率:50
发表于 10-29 16:41
小萝卜机器人的故事
经过我的申请,
马老师发放了,
小萝卜机器人的,
开发权限,
原来的小萝卜公司,
因为经营不善倒闭,
作为科研产品,
几个技术对此惋惜,
自掏腰包,
要让小萝卜机器人,
再生,
每次听到小萝卜说
发表于 10-23 05:24
最新发布!泰科机器人发布首款自研双足人形机器人
泰科机器人凭借十多年的技术积淀与持续创新,已成功推出多款高性能人形机器人四肢的解决方案。今天,泰科机器人再次迎来重大突破——首款自主研发的双足人形机器人硬件本体正式发布!这一突破标志着

机器人竞技幕后:磁传感器芯片激活 “精准感知力”
支撑机器人竞技能力的核心力量,深刻改变着竞技机器人的能力边界。
磁传感器芯片为机器人运动提供 “精准导航”。在动态平衡系统中,像昆泰芯 KTH71 系列磁传感器芯片,通过检测地磁场与
发表于 08-26 10:02
工业机器人的特点
的基础,也是三者的实现终端,智能制造装备产业包括高档数控机床、工业机器人、自动化成套生产线、精密仪器仪表、智能传感器、汽车自动化焊接线、柔性自动化生产线、智能农机、3D 打印机等领域。而智能制造装备中工业
发表于 07-26 11:22
轮式移动机器人电机驱动系统的研究与开发
【摘 要】以嵌入式运动控制体系为基础,以移动机器人为研究对象,结合三轮结构轮式移动机器人,对二轮差速驱动转向自主移动机器人运动学和动力学空间
发表于 06-11 14:30
两轮自平衡电动车及其电机控制器设计
,通过实验样车和控制器电路的设计,制作和实测实验,结果表明样车和控制器设计均结构简单,控制性能良好,能够满足两轮自平衡电动车下一步的研究使用要求。
纯分享帖,需要者可点击附件免费获取完
发表于 06-09 16:15
盘点#机器人开发平台
地瓜机器人RDK X5开发套件地瓜机器人RDK X5开发套件产品介绍 旭日5芯片10TOPs算力-电子发烧友网机器人开发套件 Kria KR260机器人开发套件 Kria KR260-
发表于 05-13 15:02
详细介绍机场智能指路机器人的工作原理
,配备高性能的电机和传动装置,为机器人提供稳定的动力输出。通过精确的电机控制算法,机器人可以实现前进、后退、转弯等各种动作,并且能够根据不同的地面状况和行走需求,灵活调整行走速度和姿态。
平衡与稳定性
发表于 05-10 18:26
【「# ROS 2智能机器人开发实践」阅读体验】视觉实现的基础算法的应用
阅读心得体会:ROS2机器人视觉与地图构建技术
通过对本书第7章(ROS2视觉应用)和第8章(ROS2地图构建)的学习,我对机器人视觉感知和
发表于 05-03 19:41
【「# ROS 2智能机器人开发实践」阅读体验】机器人入门的引路书
的非常好的,特别是一些流程图,很清晰的阐释了概念
很适合作为初学者入门的引路书
还能了解很多技术和框架,破除初学者的自负困境,让初学者知道功能是由很多开发者维护的,前人已经为各种产品搭建了完善的框架。避免陷入得一个人单打独斗的错觉
一直蠢蠢欲动ros2和
发表于 04-30 01:05
【「# ROS 2智能机器人开发实践」阅读体验】+内容初识
《ROS 2智能机器人开发实践》内容阅读初体验
《ROS 2 智能机器人开发实践》是一本针对 ROS 2(Robot Operating S
发表于 04-27 11:24



评论