 语音控制避障Arduino机器人车的制作
语音控制避障Arduino机器人车的制作

步骤1:准备
步骤2:
我们可以从网上购买现成的机箱。但是我决定自己做底盘。我用框架和塑料盒做底盘。
我在印度Ebay上买了2个最便宜的带轮减速电机。您可以在Ebay上轻松找到它们,这些是带有小齿轮的直流电动机,可降低速度。电机没有电线,所以我将一些电线焊接到端子上。这些电机消耗的电流很小,因此您无需使用粗线。然后用一些双面胶带将电动机粘贴到机箱上。我从当地市场购买了一个小型脚轮,并借助一些螺丝将其固定在底盘上。通过使用脚轮,机器人几乎可以绕其自身的半径旋转。
步骤3:将电动机连接到H桥模块
要控制电机,我使用H桥模块。通过使用H桥,整个项目变得非常容易。
H桥模块到Arduino
Vcc到电池+
Gnd到Gnd
5v到Arduino上的5v引脚
左马达+到Ardino 6引脚
左马达-到Arduino 5引脚
右马达+到Arduino 10引脚
正确的电动机-到Arduino 9引脚
注意:如果电动机方向错误,请尝试交换arduino引脚
第4步:设置蓝牙模块
现在将Bluetooth模块连接至Arduino
Vcc至5v
Gnd至Gnd
Tx至Rx
Rx至Tx
到A0引脚的状态
注意:在对migboard Arduino板进行编程时,拔下Tx Rx连接。
第5步:超声波传感器
为检测障碍物,我使用了超声波SR04传感器。这些传感器在印度Ebay上仅售90卢比。 Arduino很好地支持了该传感器。
伺服连接:
Vcc到Arduino 5v引脚
从Gnd到Gnd
信号到Arduino 7引脚
超声波传感器连接:
从Vcc到5v
从Gnd到Gnd
转到Arduino 3针
回声到Arduino 2针
第6步:编程
我对代码做了很多实验。最后我汇编了此代码。您可以在代码中更改语音命令。
在此处下载代码
步骤7:控制机器人的应用
我从Play商店下载应用程序以控制机器人。
-
机器人
+关注
关注
213文章
31455浏览量
223689 -
语音控制
+关注
关注
5文章
517浏览量
29744 -
Arduino
+关注
关注
190文章
6527浏览量
197472
发布评论请先 登录
基于米尔RK3576核心板的国产割草机器人解决方案
固态激光雷达参数以及避障视频
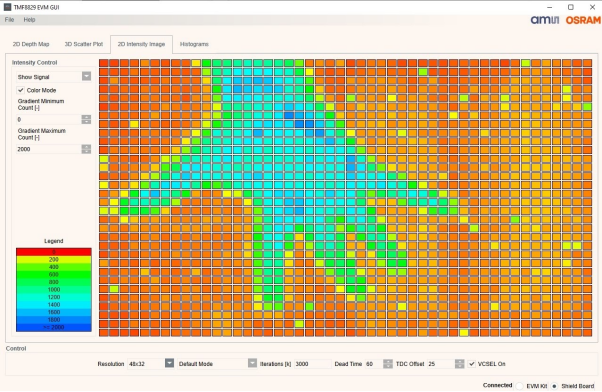
赋能机器人“慧眼”:TMF8829 48x32 多区 dToF 传感器,定义避障新高度
CW32L012小型机器人控制评估板活动 四足机器人+智能小车 开箱评测
高精度机器人控制的核心——基于 MYD-LT536 开发板的精密运动控制方案
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
小萝卜机器人的故事
盘点割草机器人六大避障传感器
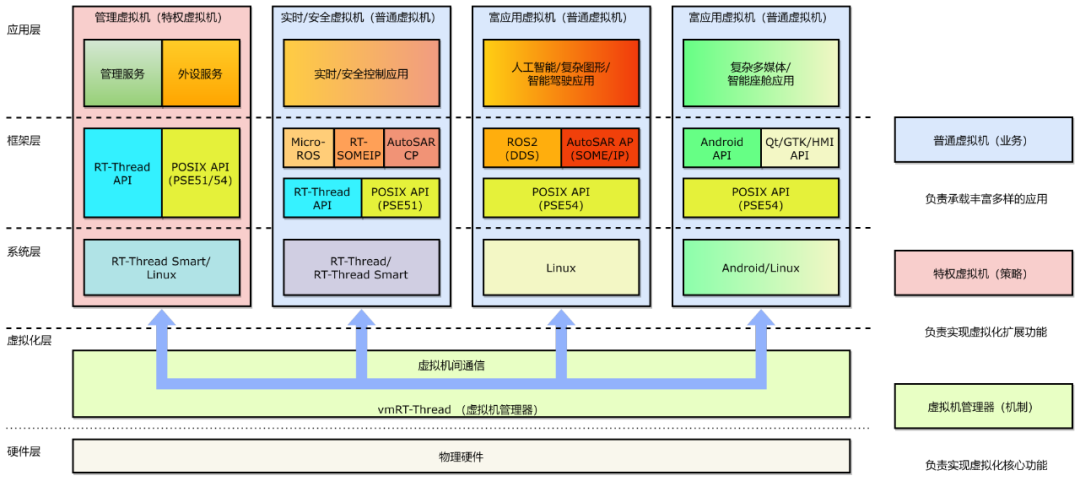
通过vmRT-Thread和ROS2赋能机器人智能开发
AGV机器人如何实现毫秒级避障?深度解析多传感器融合的核心技术




评论