 如何使用红外传感器感应眼睛的运动并控制LED
如何使用红外传感器感应眼睛的运动并控制LED

第1步:构造
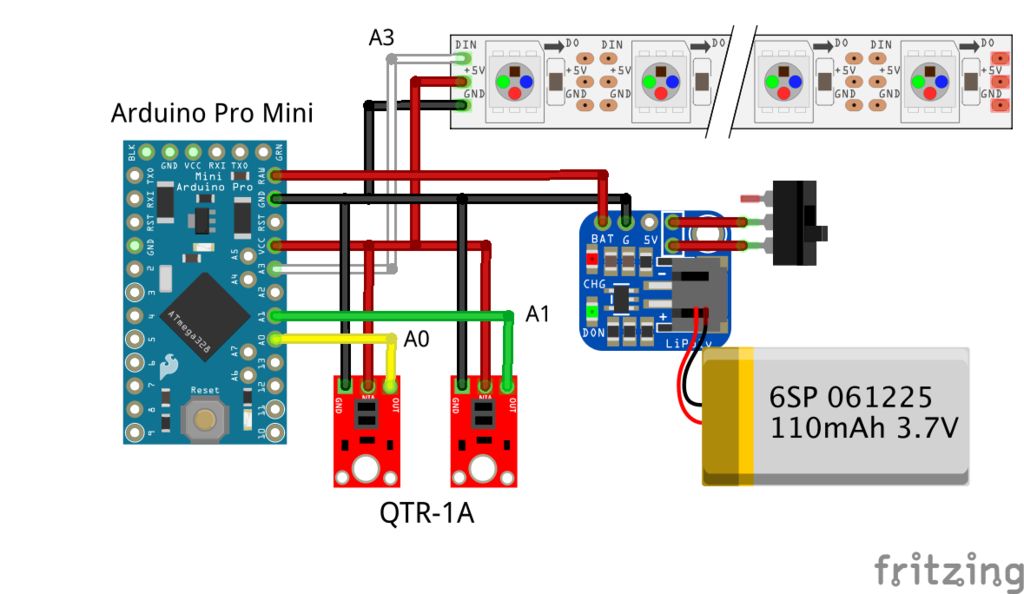
我使用了两个传感器QTR-1A进行眼睛跟踪。
组件
SparkFun Arduino Pro Mini 328-5V/16MHz
Adafruit LiIon/LiPoly背包Pro Trinket/ItsyBitsy附加组件
LiPo电池
NeoPixel条
QTR-1A反射传感器
步骤2:NeoPixel LED眼球
使用NeoPixel LED胶带。 LED是68个单位。
LED用双面胶带固定在碗上并进行了布线。
步骤3:传感器单元
我使用了两个传感器QTR-1A进行眼睛跟踪。将QTR-1A放在塑料片上,其间距约为眼睛的宽度。
第4步:Arduino代码
当虹膜接近一个传感器时,反射光会减少,传感器值会增加。相反,当虹膜移开时,反射光增加,而光反射器的传感器值减小。
LED眼球瞳孔的左右移动感测到一个传感器值的增大和减小。并控制它。闪烁时,两个传感器的值都会减小,因此,如果两个传感器的值同时减小,LED眼球的眼睑就会下降。
我使用了以下库。
QTRsensors:https://github.com/pololu/qtr-sensors-arduino
Adafruit_NeoPixel:https://github.com/adafruit/Adafruit_NeoPixel
#include
#include
#define NUM_SENSORS 2 // number of sensors used
#define NUM_SAMPLES_PER_SENSOR 10 // averaging
#define EMITTER_PIN QTR_NO_EMITTER_PIN
int iniSensorValL, sensorValL;
int iniSensorValR, sensorValR;
#define PIN A3
Adafruit_NeoPixel led = Adafruit_NeoPixel(68, PIN, NEO_GRB + NEO_KHZ800);
int blackNum = 24;
int pupilNum = 12;
uint32_t color;
int brightness = 40;
byte eyeColor;
int LR =7;
boolean lid = false;
int cnt = 0;
//Black eye L&R animation
int blackLED[15][24] = {{12,32,35,55,68,68,68,68,68,68,68,68,68,68,68,68,68,68,68,68,68,68,68,68},
{12,13,31,36,54,55,68,68,68,68,68,68,68,68,68,68,68,68,68,68,68,68,68,68},
{11,13,14,30,37,53,54,56,68,68,68,68,68,68,68,68,68,68,68,68,68,68,68,68},
{10,11,14,15,29,38,52,53,56,57,68,68,68,68,68,68,68,68,68,68,68,68,68,68},
{ 9,10,11,12,15,16,28,33,34,39,51,52,55,56,57,58,68,68,68,68,68,68,68,68},
{ 0, 8, 9,10,11,12,13,16,17,27,32,35,40,50,51,54,55,56,57,58,59,67,68,68},
{ 0, 1, 7, 8, 9,10,13,14,17,18,26,31,36,41,49,50,53,54,57,58,59,60,66,67},
{ 1, 2, 6, 7, 8, 9,14,15,18,19,25,30,37,42,48,49,52,53,58,59,60,61,65,66},
{ 2, 3, 5, 6, 7, 8,15,16,19,20,24,29,38,43,47,48,51,52,59,60,61,62,64,65},
{ 3, 4, 5, 6, 7,16,17,20,21,23,28,39,44,46,47,50,51,60,61,62,63,64,68,68},
{ 4, 5, 6,17,18,21,22,27,40,45,46,49,50,61,62,63,68,68,68,68,68,68,68,68},
{ 4, 5,18,19,26,41,48,49,62,68,68,68,68,68,68,68,68,68,68,68,68,68,68,68},
{ 4,19,20,25,42,47,48,63,68,68,68,68,68,68,68,68,68,68,68,68,68,68,68,68},
{20,21,24,43,46,47,68,68,68,68,68,68,68,68,68,68,68,68,68,68,68,68,68,68},
{21,23,44,46,68,68,68,68,68,68,68,68,68,68,68,68,68,68,68,68,68,68,68,68}};
//pupil L&R animation
int pupilLED[15][12] = {{33,34,68,68,68,68,68,68,68,68,68,68},
{32,33,34,35,68,68,68,68,68,68,68,68},
{12,31,32,33,34,35,36,55,68,68,68,68},
{12,13,30,31,32,33,34,35,36,37,54,55},
{13,14,29,30,31,32,35,36,37,38,53,54},
{14,15,28,29,30,31,36,37,38,39,52,53},
{15,16,27,28,29,30,37,38,39,40,51,52},
{16,17,26,27,28,29,38,39,40,41,50,51},
{17,18,25,26,27,28,39,40,41,42,49,50},
{18,19,24,25,26,27,40,41,42,43,48,49},
{19,20,23,24,25,26,41,42,43,44,47,48},
{20,21,22,23,24,25,42,43,44,45,46,47},
{21,22,23,24,43,44,45,46,68,68,68,68},
{22,23,44,45,68,68,68,68,68,68,68,68},
{22,45,68,68,68,68,68,68,68,68,68,68}};
//Blink animation
int eyelid = 0;
int eyelidNum[8] = {0,4,8,16,24,34,44,56};
int eyelidLED[56] = {64,65,66,67,58,59,60,61,56,57,62,63,49,50,51,52,47,48,53,54,38,39,40,41,46,55,36,37,42,43,26,27,28,29,35,44,24,25,30,31,15,16,17,18,34,45,23,32,13,14,19,20,6,7,8,9};
QTRSensorsAnalog qtra((unsigned char[]) {0, 1}, NUM_SENSORS, NUM_SAMPLES_PER_SENSOR, EMITTER_PIN);
unsigned int sensorValues[NUM_SENSORS];
void blink(int eyelid, int LR) {
if (eyelid != 8){
//Pewter
for(uint16_t i=0; iled.setPixelColor(i, led.Color(66, 66, 66));
}
//Black eye
for(uint16_t i=0; iled.setPixelColor(blackLED[LR][i], color);
}
//pupil
for(uint16_t i=0; iled.setPixelColor(pupilLED[LR][i], led.Color(0, 0, 66));
}
//eyelid
for(int i=0; i 《 eyelidNum[eyelid]; i++) {
led.setPixelColor(eyelidLED[i], 0);
}
} else if (eyelid == 8){
led.clear();
}
led.show();
}
void setup() {
Serial.begin(115200);
led.begin();
led.setBrightness(brightness); // Initial Brightness 40
led.show(); // Initialize all pixels to ‘off’
color = led.Color(0, 177, 55); //pupil color
delay(100);
qtra.read(sensorValues);
iniSensorValL = sensorValues[0];
iniSensorValR = sensorValues[1];
blink(eyelid, LR);
}
void loop() {
//QTR - 1A sensor value
qtra.read(sensorValues);
sensorValL = sensorValues[0];
sensorValR = sensorValues[1];
double rasioL = (double)sensorValL / iniSensorValL;
double rasioR = (double)sensorValR / iniSensorValR;
Serial.print(rasioL);
Serial.print(“ ”);
Serial.println(rasioR);
if(rasioL 》 0.985 && rasioR 《 0.985){ //right
for(int i = LR; i 《 12; i++){
blink(0, i);
delay(40);
LR = i;
}
}else if(rasioL 《 0.985 && rasioR 》 0.985){ //left
for(int i=LR; i》2; i--){
blink(0, i);
delay(40);
LR = i;
}
}else if(lid == false && rasioL 《 0.96 && rasioR 《 0.96){ //Blinking close
for(int i = 1; i 《 9; i++){
blink(i, LR);
delay(40);
lid = true;
}
}else if(lid == true && rasioL 》 0.96 && rasioR 》 0.96){ //Blinking open
for(int i = 8; i 》 0; i--){
blink(i, LR);
delay(40);
lid = false;
}
}else if(lid == false && rasioL 》 0.96 && rasioR 》 0.96) { //normal
//cnt++;
//eyelid = 0;
if(LR 《= 7){
for(int i=LR; i《=7; i++){
blink(0, i);
delay(40);
LR = i;
}
}else {
for(int i=LR; i》=7; i--){
blink(0, i);
delay(40);
LR = i;
}
}
}
//Initial value refresh
if (cnt 》 10){
iniSensorValL = sensorValL;
iniSensorValR = sensorValR;
cnt = 0;
}
}
第5步:操作
用传感器检测瞳孔的左右移动和眨眼,并控制眼球LED。
-
led
+关注
关注
244文章
24779浏览量
693399 -
红外传感器
+关注
关注
9文章
574浏览量
49538
发布评论请先 登录
传感器周边配套怎么选?尼塞拉红外滤光片与菲涅尔透镜科普

热释电红外传感器核心选型指南,尼塞拉爆款型号全解析

尼塞拉热释电红外传感器:从原理到应用,解锁智能感应核心密码

贴片式与直插式热释电红外传感器封装选择指南
探索Broadcom ezPyro™ 背板电路板:开启红外传感评估新旅程
探索Broadcom ezPyro™ SMD+ I2C热释电扩展红外传感器:气体传感的新利器
探索博通ezPyro™ SMD评估套件:开启红外传感新视野
STHS34PF80红外传感器技术解析与应用指南
红外传感器技术:微测辐射热计解析

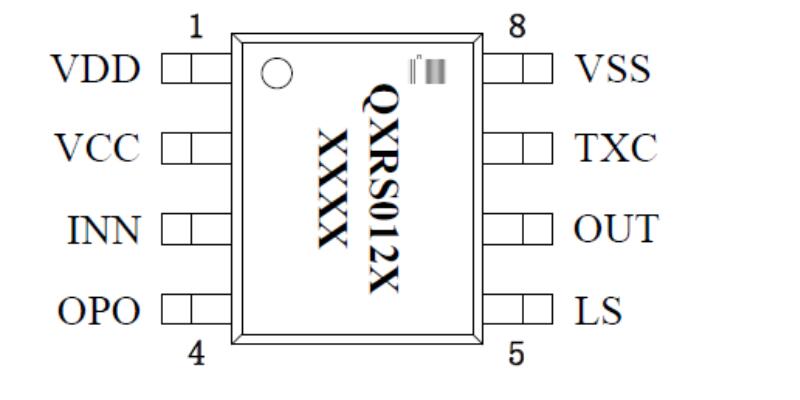
QXRS012 热释电红外人体感应处理器





评论