 简易迷宫求解机器人的制作
简易迷宫求解机器人的制作

第1步:准备好你的组件
我使用了上面列出的所有组件:
1-2齿轮直流电机
2- 2轮
3- 1 custer wheel
4- LCD
5-面包板和一些电线(男性 - 男性)&&(男性 - 女性)
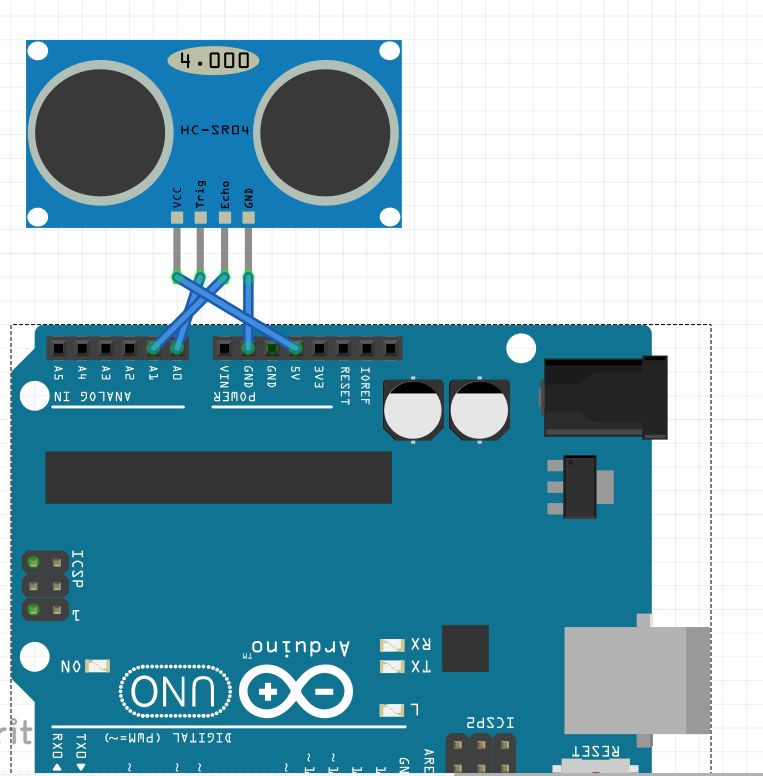
6-3超声波传感器
4-超声波支架
5- Arduino UNO板
6-2电池3.7 V带电池座
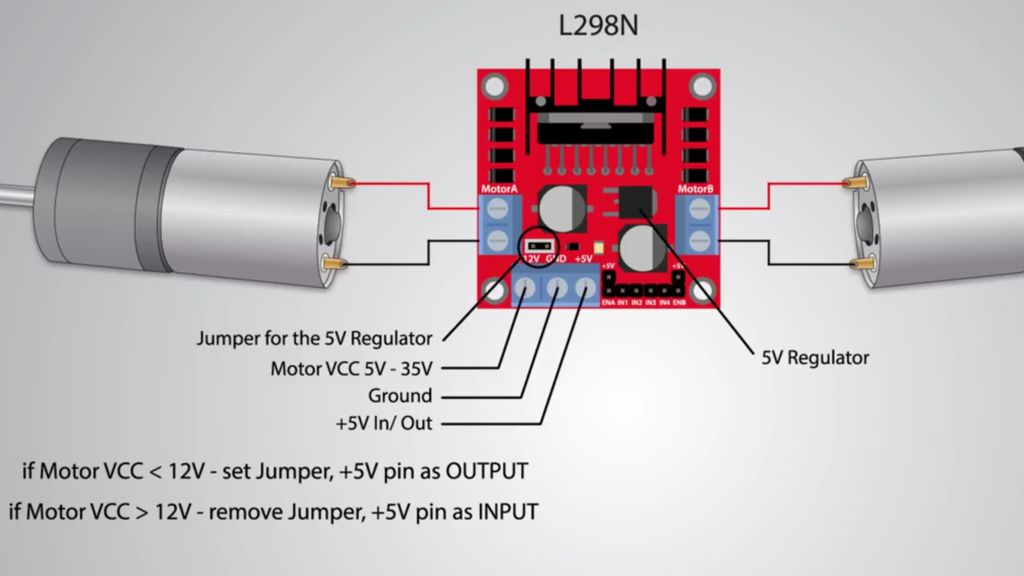
7- L298N电机驱动
机器人身体的8-木制
9-开关
步骤2:第一层
1-连接电机,w高跟鞋和驱动器的使用
2-使用电线将电机连接到电机驱动器
驱动器的3个引脚连接到引脚3,12,13,5,2,7为了arduino
请注意:
如果右侧电机的轮子向相反的方向移动,则只需更换连接到驱动器的电机的电线
步骤3:第二层
- 将arduino,传感器和面包板层放在第二层和让我们放一些电线
请阅读代码文件以了解我的连接,但让我们总结一下:
1)每个声纳传感器的VCC和GND到面包板,Trigger和Echo将连接到引脚A0,A1,A2,A3,A4,A5用于3个传感器
2)5V和GND从arduino提供breadBoard
3)5v从驱动器到arduino输入
4)从arduino到GND的驱动器
步骤4:启动电源
放置你的电池座中装有电池,然后将红线连接到i上使用arduino的电线将驱动器和黑线连接至驱动器的GND
步骤5:可选步骤
此步骤为用你的机器人带来一些快乐
1)放置你的液晶显示器并像连接的代码一样连接到arduino
2)将电池座的红线连接到ON的引脚上开关并从另一个引脚接线到驱动器的输入端以通过开关控制机器人的电源
3)最后完成并随意尝试并让我知道是否你遇到任何问题
-
机器人
+关注
关注
214文章
31647浏览量
224545
发布评论请先 登录
人形机器人热度狂飙,工业赛道真正落地的是复合机器人!

基于米尔RK3576核心板的国产割草机器人解决方案
为什么说关节扭矩传感器是高端机器人的“触觉神经”?
再谈低温烧结银的应用:从春晚四家机器人出镜的幕后推手说起
探索RISC-V在机器人领域的潜力
RK3576机器人核心:三屏异显+八路摄像头,重塑机器人交互与感知
小萝卜机器人的故事
自制巡线解迷宫机器人(上)
什么是机器人?追溯机器人技术的演变和未来

机器人竞技幕后:磁传感器芯片激活 “精准感知力”
工业机器人线束揭秘 | 性能加持助力机器人作业效率稳定跃升

工业机器人的特点
工业机器人与协作机器人概念不同




评论