 双轴数字水平仪的制作
双轴数字水平仪的制作

第1步:材料
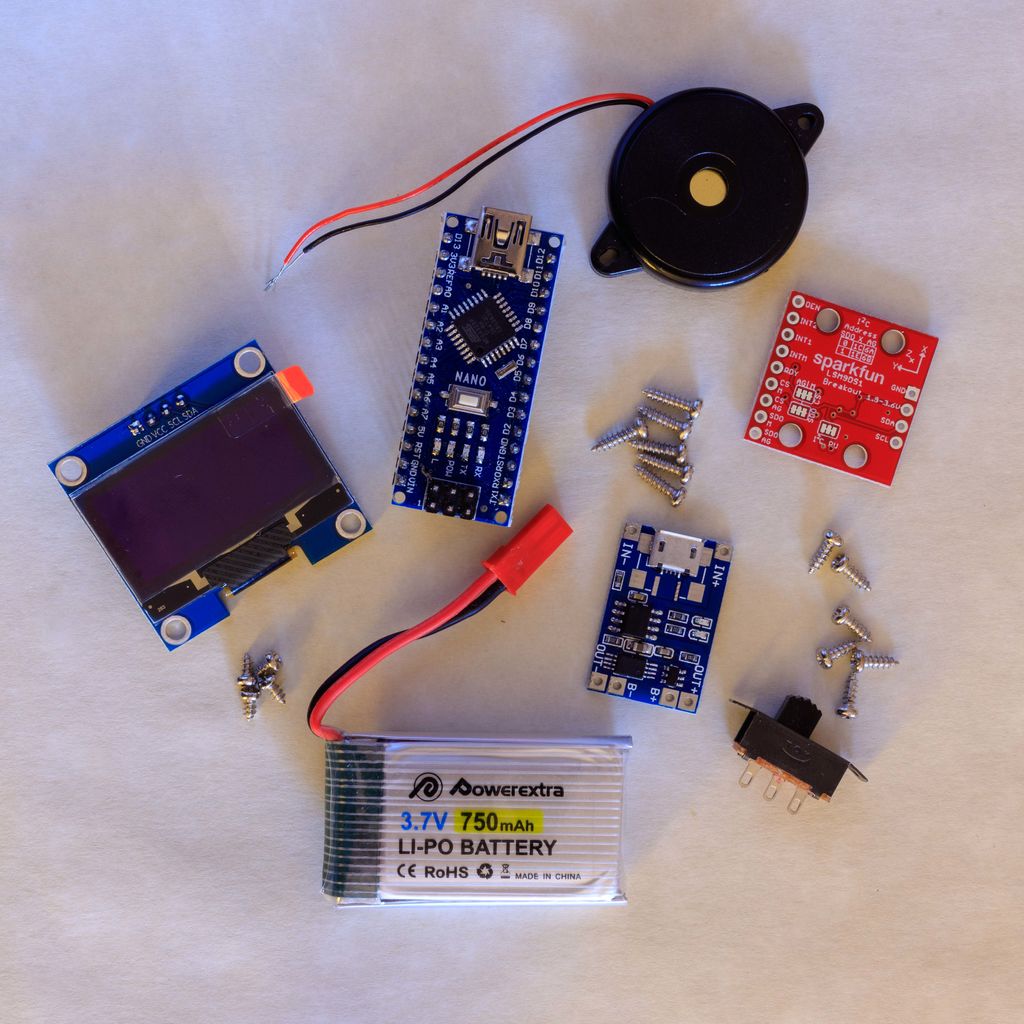
以下是将此数字水平放在一起的材料。大多数购买链接用于多件,通常比购买单个组件便宜。例如,TP4056芯片10片装9美元(不到1美元/TP4056),或者可以5美元单独购买。
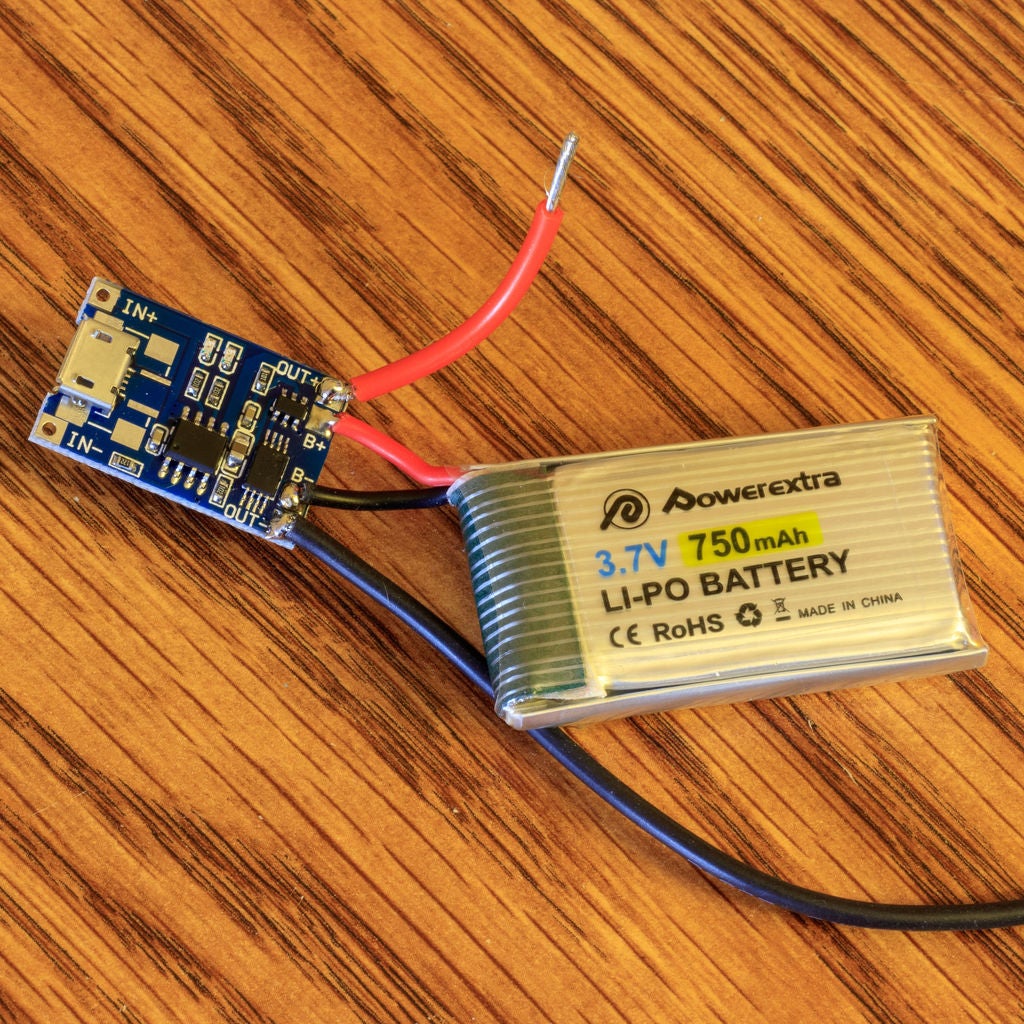
TP4056锂电池充电器
LSM9DS1加速度计
Arduino Nano
128x64 OLED液晶显示器
压电扬声器
3.7V Li-Po电池
M2盘头自攻螺钉 - 需要4个M2x4,6个M2x6和6个M2x8螺钉
滑动开关
除螺丝外,所提供的链接将带您到亚马逊。但是,几乎所有这些商品都可以在eBay上购买,也可以直接从中国购买。请记住,从中国订购可能会导致较长的交货时间(3-4周并不罕见)。
另请注意,许多这些组件都有替代品。例如,您可以用不同的加速度计替换LSM9DS1(例如MPU-9205)。您可以使用任何兼容Arduino的处理器和适当的GPIO引脚来替换Arduino Nano。
特别是LSM9DS1是我在Sparkfon以低于10美元的价格出售的,但通常价格较高; MPU-9025以较低的价格提供类似的功能。
如果进行替换,您可能需要修改案例(或至少如何在案例中安装组件),您可能需要修改软件以连接到备用组件。我没有那些修改 - 你需要进行适当的研究和更新。
第2步:接线图
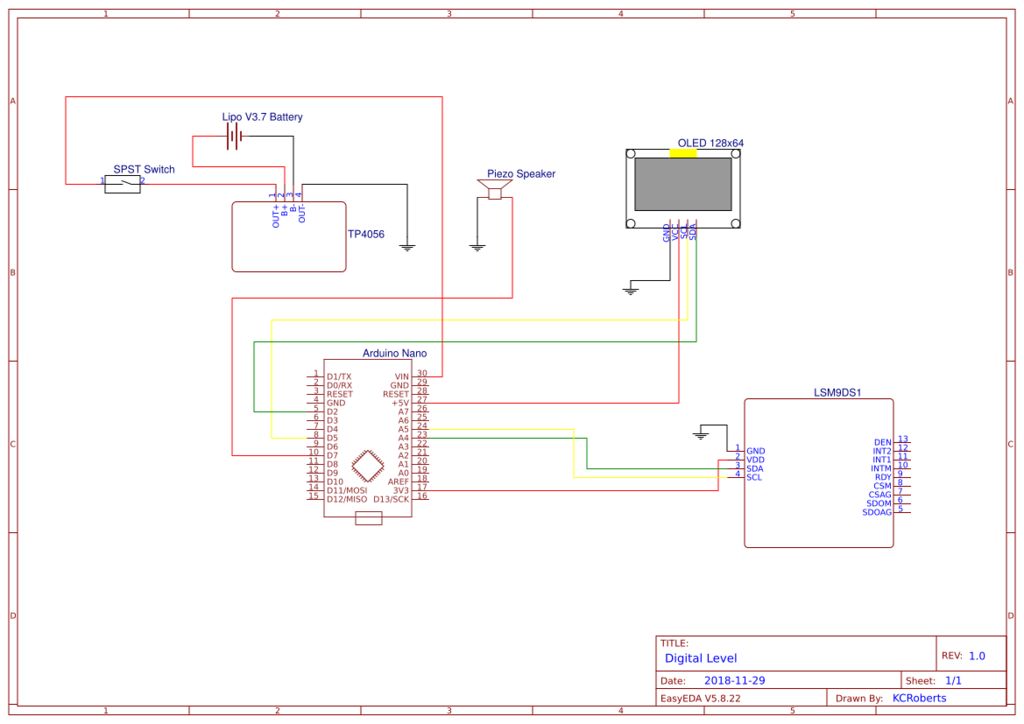
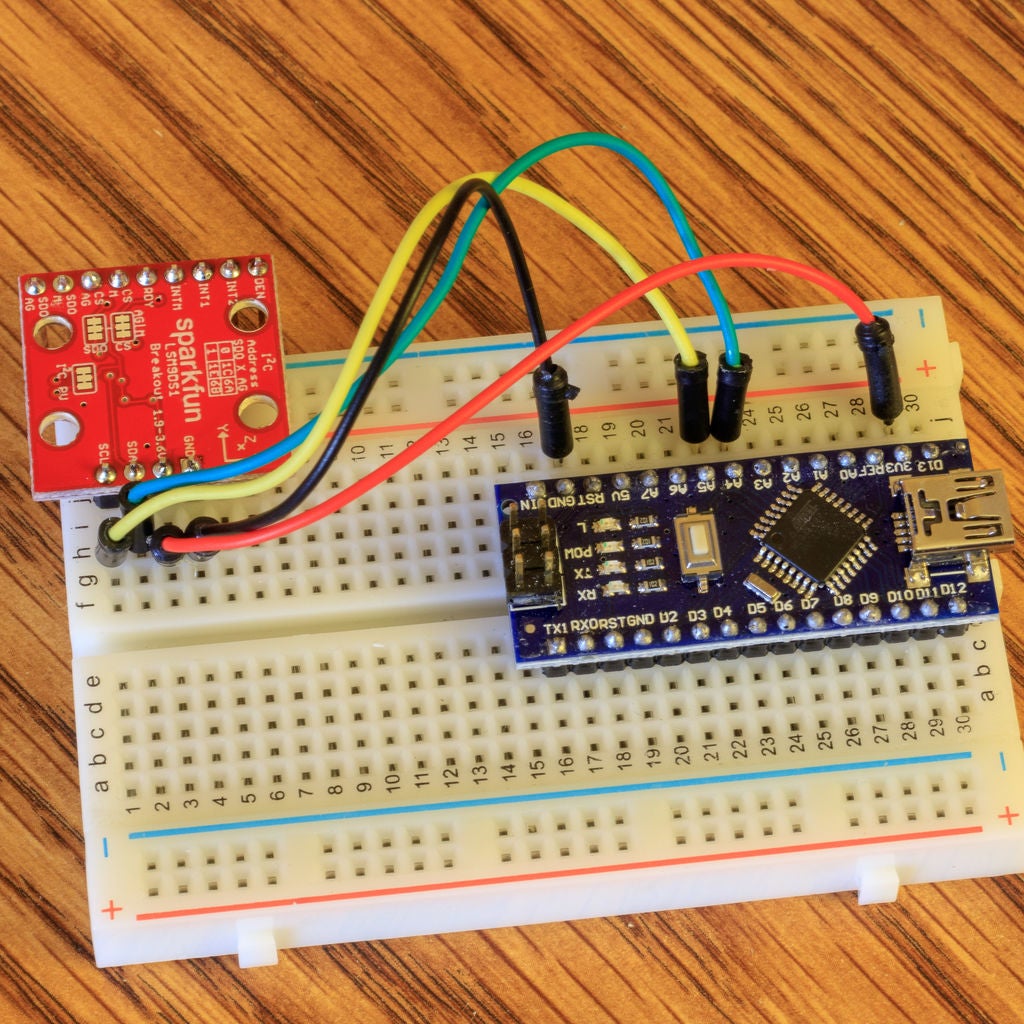
接线示意图详细说明了各种电子元件如何相互连接。红线代表正电压,黑线代表地。黄色和绿色线用于来自加速度计和OLED LCD显示器的数据信号。您将在以下步骤中看到这些组件如何连接在一起。
步骤3:创建案例

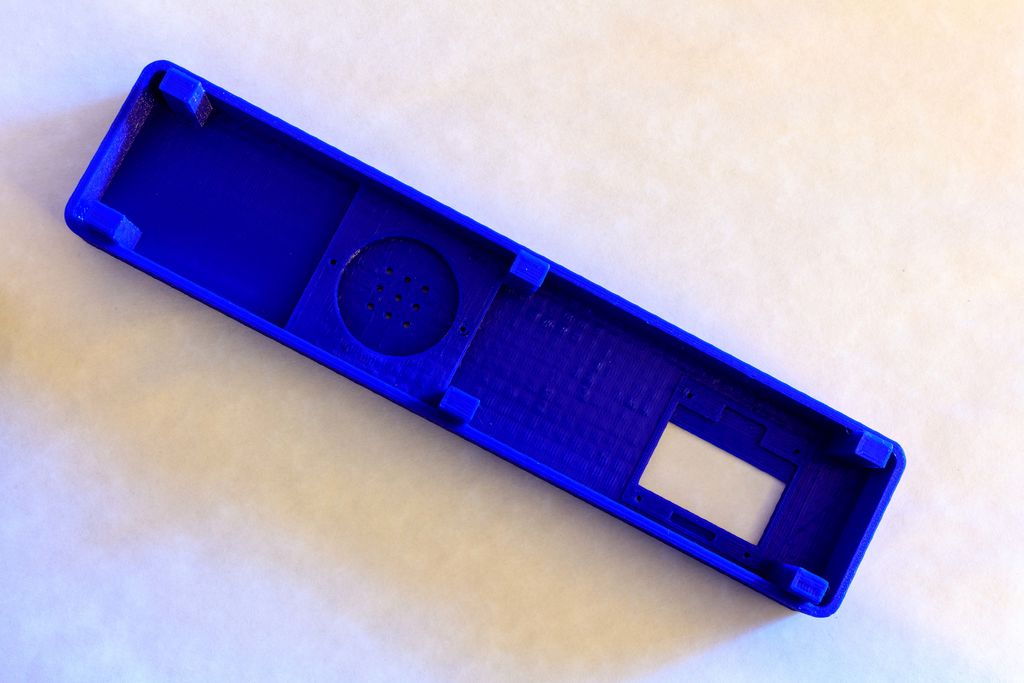
如果你有一台3D打印机,可以很容易地打印外壳。此Instructable中包含的STL文件。如果您没有3D打印机,可以将STL文件上传到3D打印机局(例如此打印机局)并为您打印。
我打印的没有边缘或木筏(并且没有支持)和20%填充,但你可以打印你的,但你已经习惯了打印。每件应单独印刷,平放。您可能需要将其旋转45度才能使其适合打印机床。使用Monoprice Maker Select Plus打印我的床,尺寸为200 mm x 200 mm - 每件打印约需12小时。如果您的床较小,可能不适合。建议不进行缩放,因为电子元件的安装座将无法正确缩放。
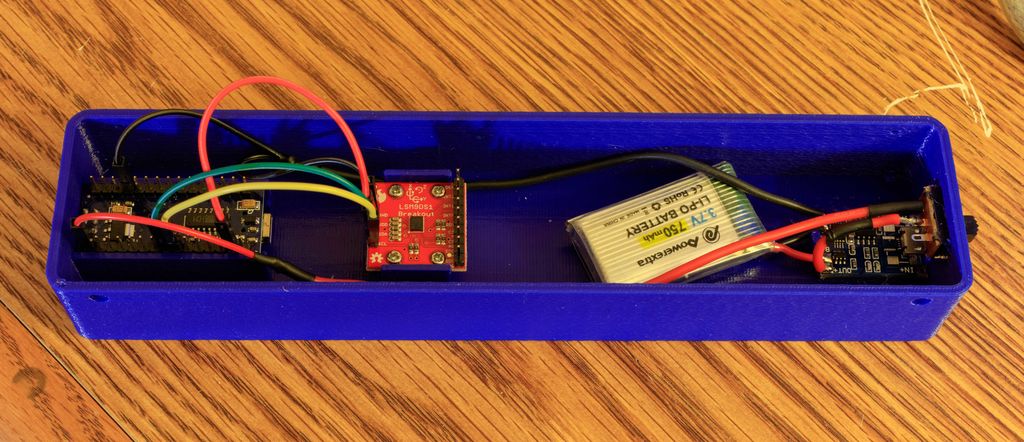
步骤4:将组件连接到面包板以验证连接(可选)
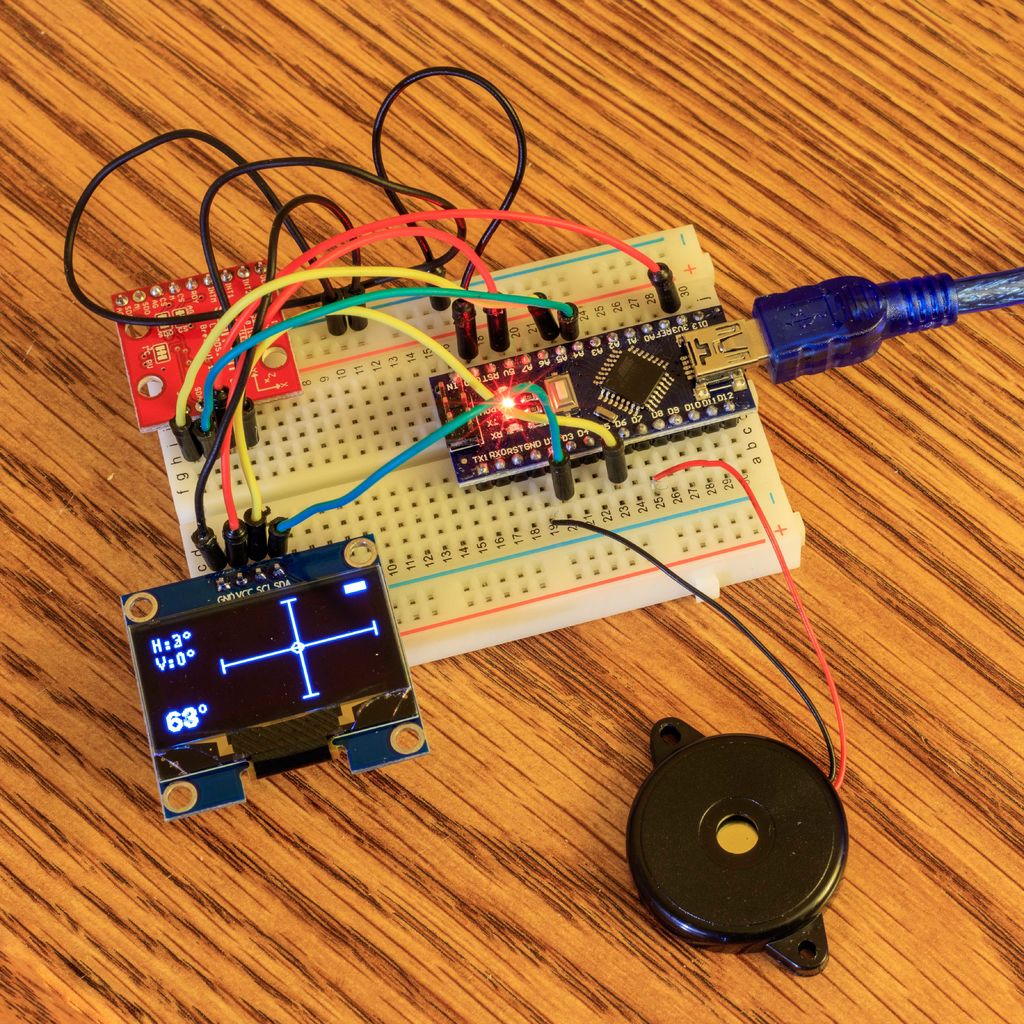
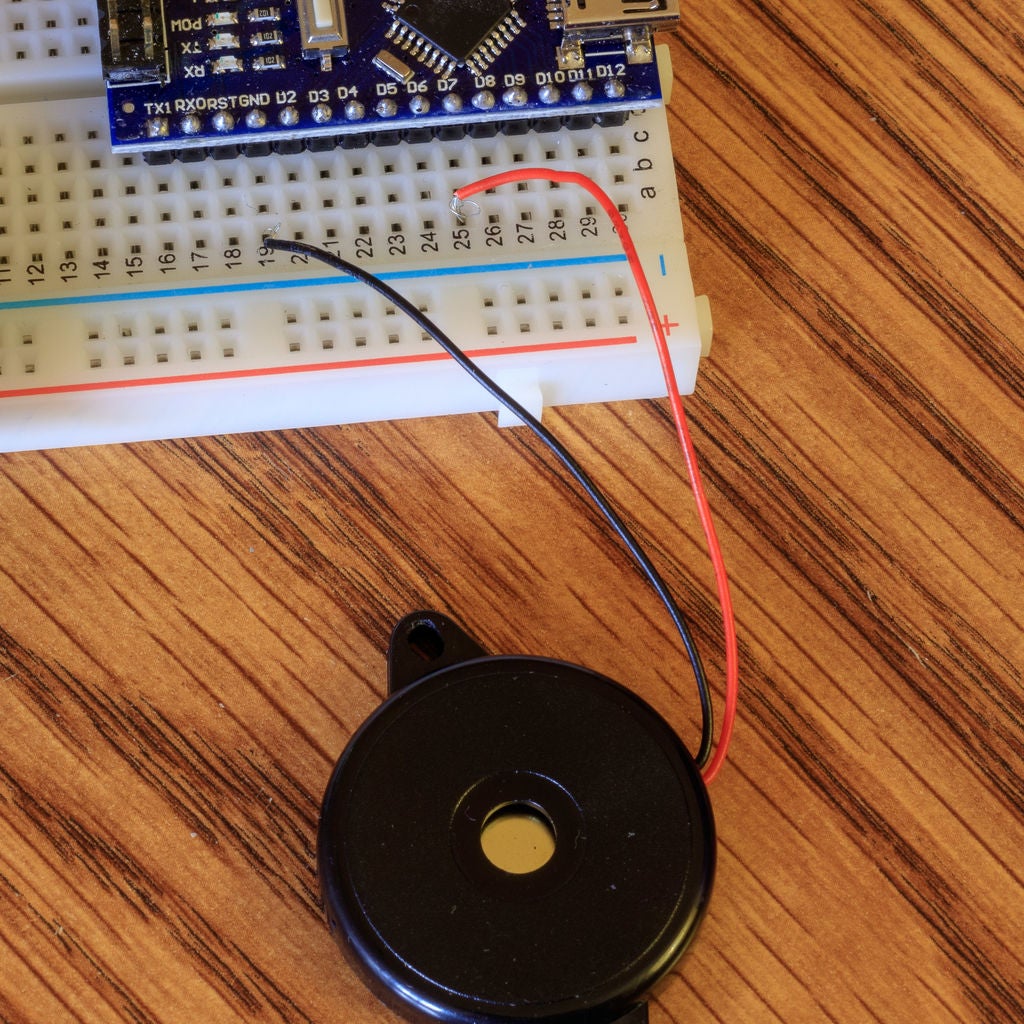
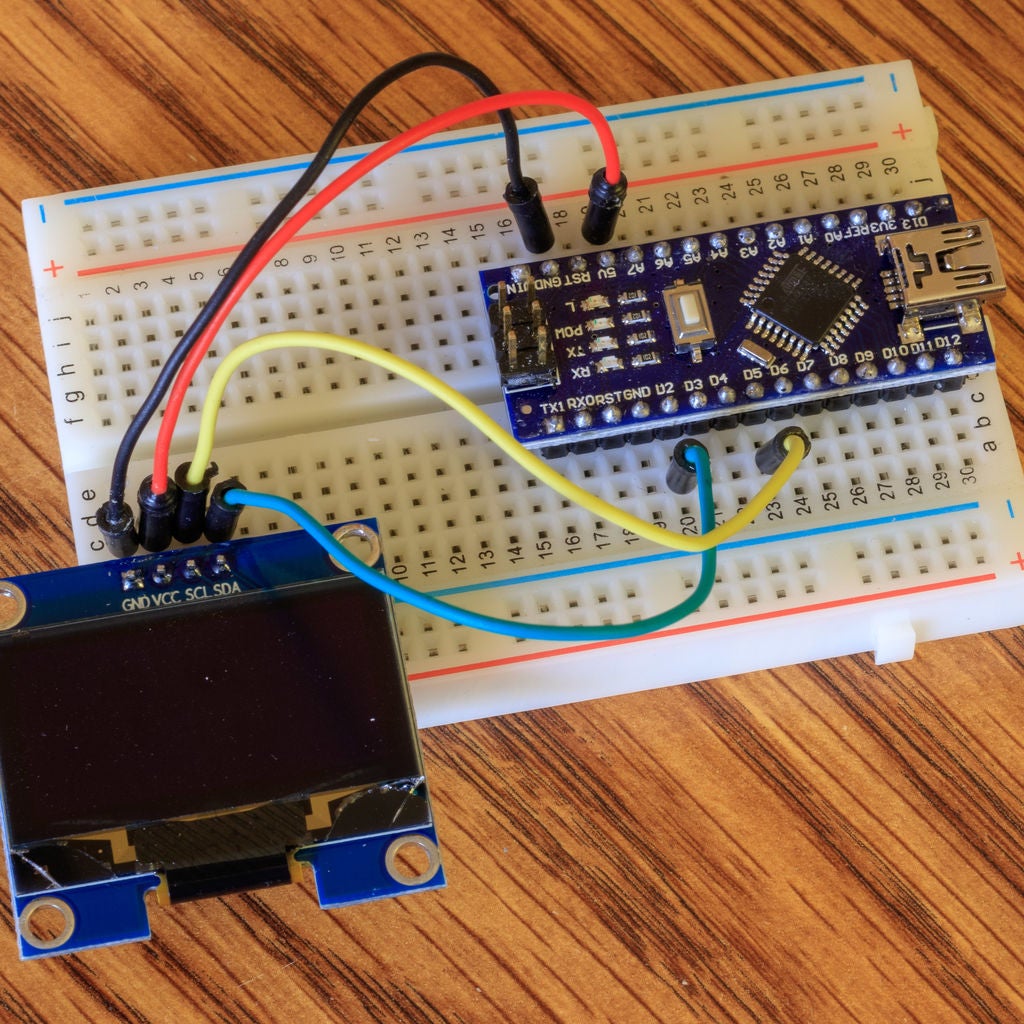
我强烈建议将主要组件连接到面包板以验证连接性在继续将部件安装在壳体内之前。您可以将软件下载到Arduino Nano(参见下一步),并验证OLED LCD显示器是否正确接线并且是否可操作,以及加速度计是否已正确接线并且正在向Arduino Nano报告其数据。此外,这可用于验证可选压电扬声器的操作。
在此阶段我没有将电池和充电器连接到面包板 - 安装后连接开关以控制电池切换到案件。最后一张图显示了布线之前的情况。
步骤5:将软件下载到Arduino Nano
软件加载到Arduino Nano使用Arduino IDE。这可以在构建 DigiLevel 的过程中随时进行,但最好在使用面包板(参见上一步骤)连接组件时进行,以验证电气的正确接线和操作组件。
该软件需要安装2个库。第一个是U8g2库(由oliver提供) - 您可以通过单击Arduino IDE中的“草图 - 》包含库 - 》管理库。..”来安装它。搜索U8g2,然后单击“安装”。第二个库是Sparkfun LSM9DS1库。您可以在此处获取有关如何安装该库的说明。
在库规范之后,软件具有设置部分和主处理循环。设置部分初始化加速度计和OLED LCD显示屏,然后在显示主显示屏之前显示启动屏幕。如果连接了扬声器,它将在扬声器上发出一声嘟嘟声以表示开机状态。
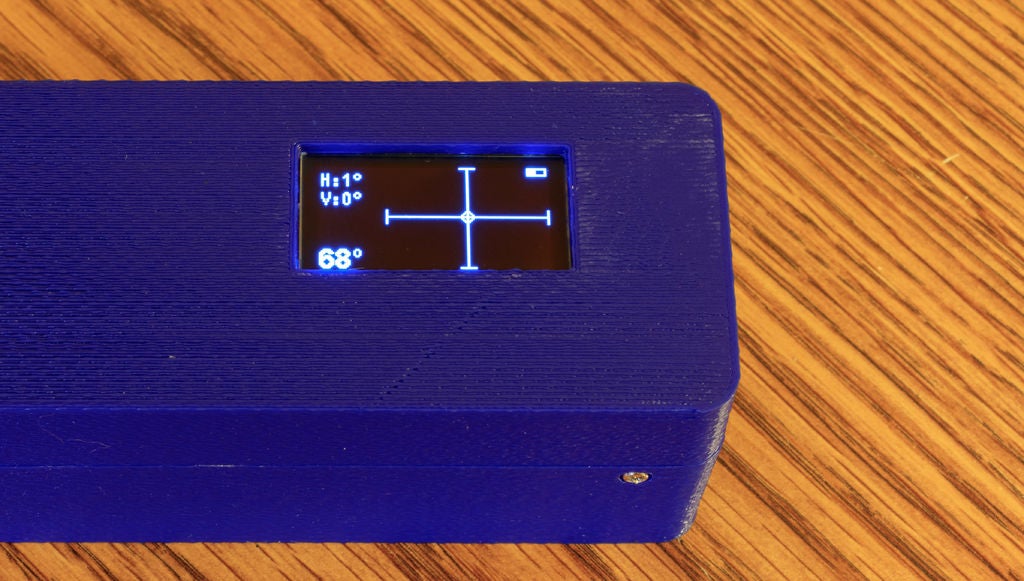
主处理循环负责读取加速度计,获取x和y角度,然后显示值作为一组绝对数字,也是图形上的图形。还会显示加速度计的温度读数(华氏度或摄氏度)。如果该级别之前是非级别的,当它返回到级别时,它将在扬声器上产生两声蜂鸣声(如果连接)。
最后,获得电池的电压以确定并显示当前的电池水平。我不知道这段代码的准确程度如何,但它足以准确显示完整的电池并在使用过程中逐渐降低电池电量。
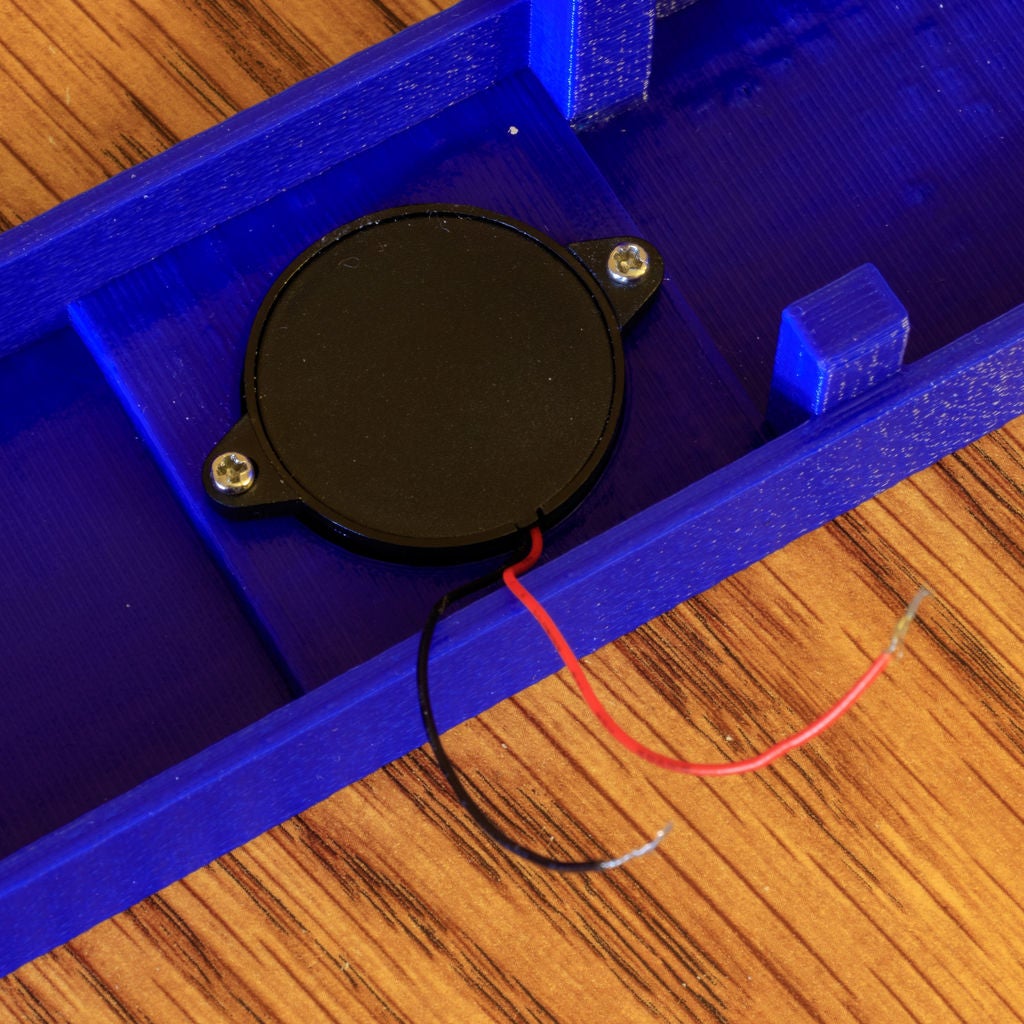
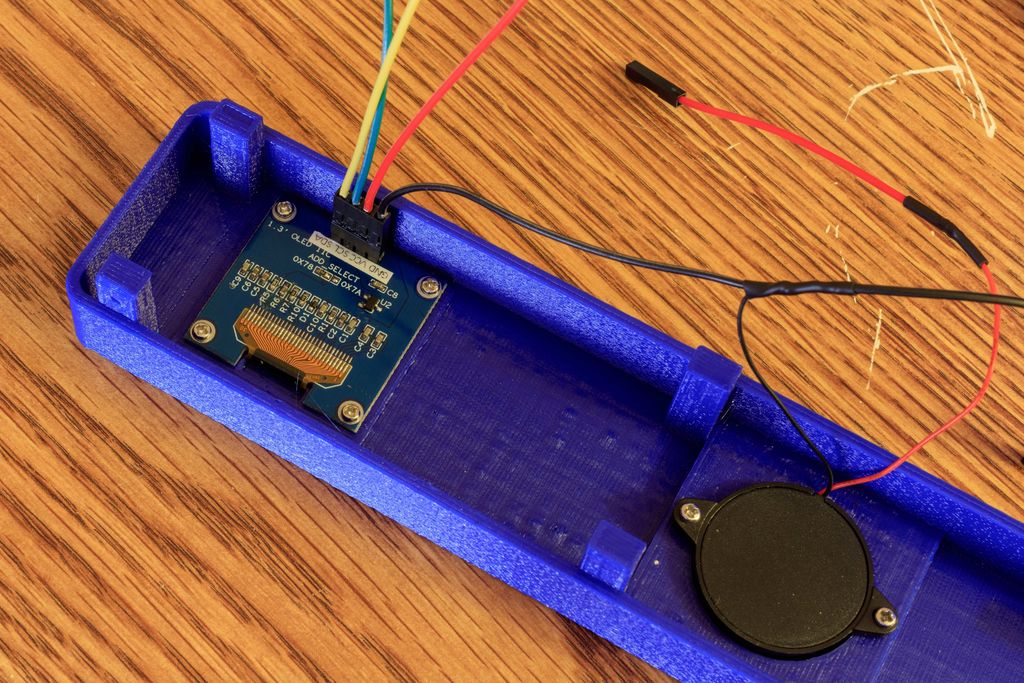
步骤6:安装和接线OLED显示器和压电扬声器
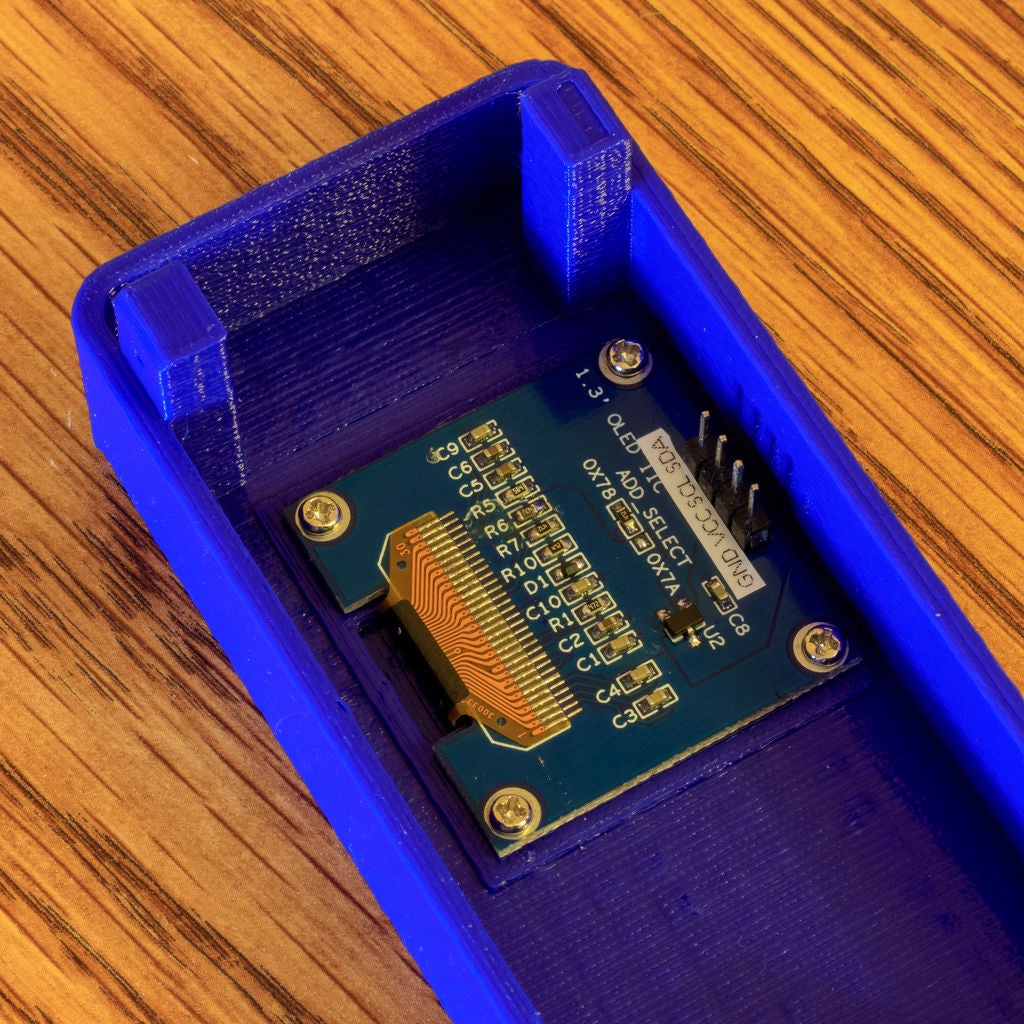
1.3英寸OLED显示屏(128x64)使用4个M2x4安装到机箱的上半部分盘头自攻螺钉。我建议你在安装之前将电线连接到显示器上。这样可以确保在连接电线时可以看到引脚是如何贴标签的。一旦安装了显示器,你就不会能够看到引脚的标签。你会注意到我在显示器的背面添加了一个标签,这样我就能记住引脚值(因为我第一次没有这样做而且我没有正确连线。 。.)。
扬声器用于在打开数字电平时发出短暂的音调,以验证电池是否正常以及电池是否正常工作。每当电平移动时,扬声器也会发出双音。来自非列弗el位置到一个水平位置。这是为了在您定位关卡或任何关卡时提供声音反馈。它使用2个M2x4盘头自攻螺钉安装在机箱的上半部分。您不需要扬声器 -DigiLevel 可以在没有它的情况下正常运行,但是您将缺少任何声音反馈。
步骤7:安装和接线电池,电池充电器和开关
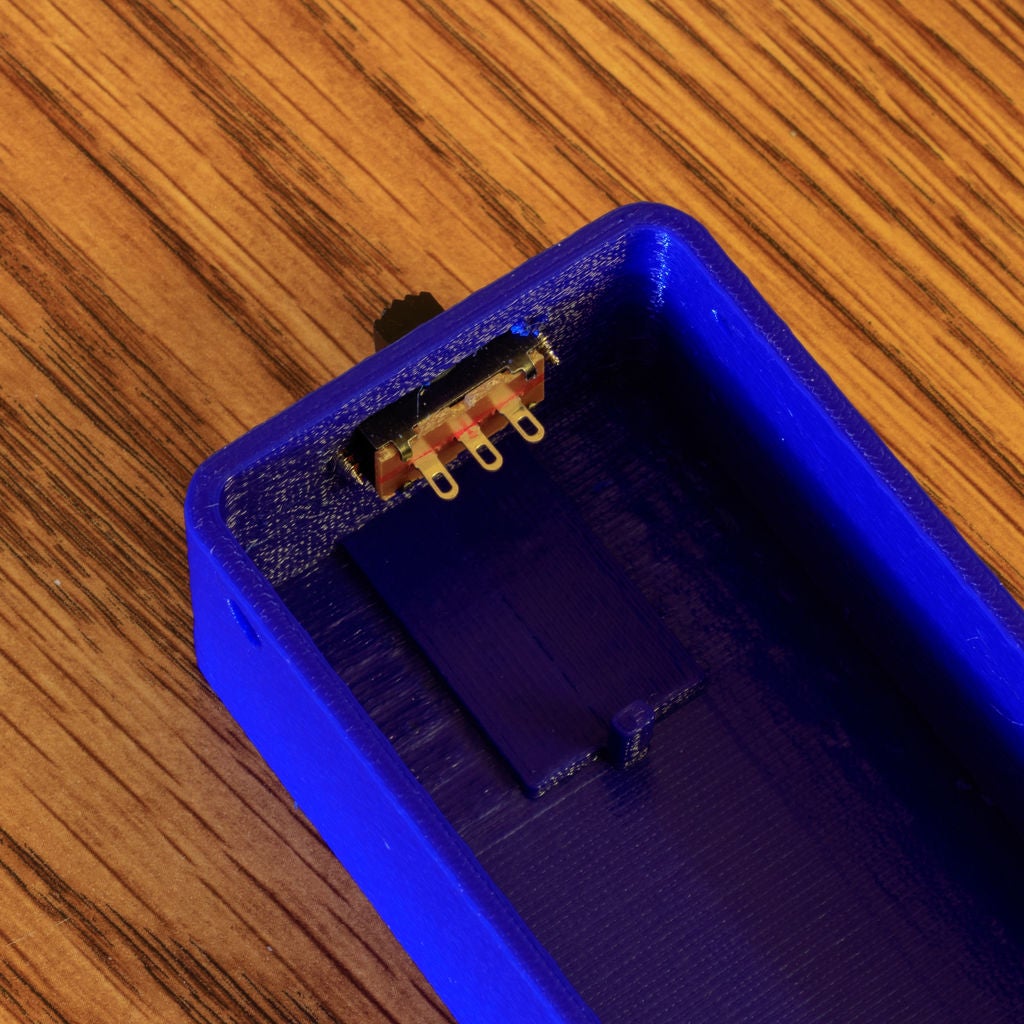

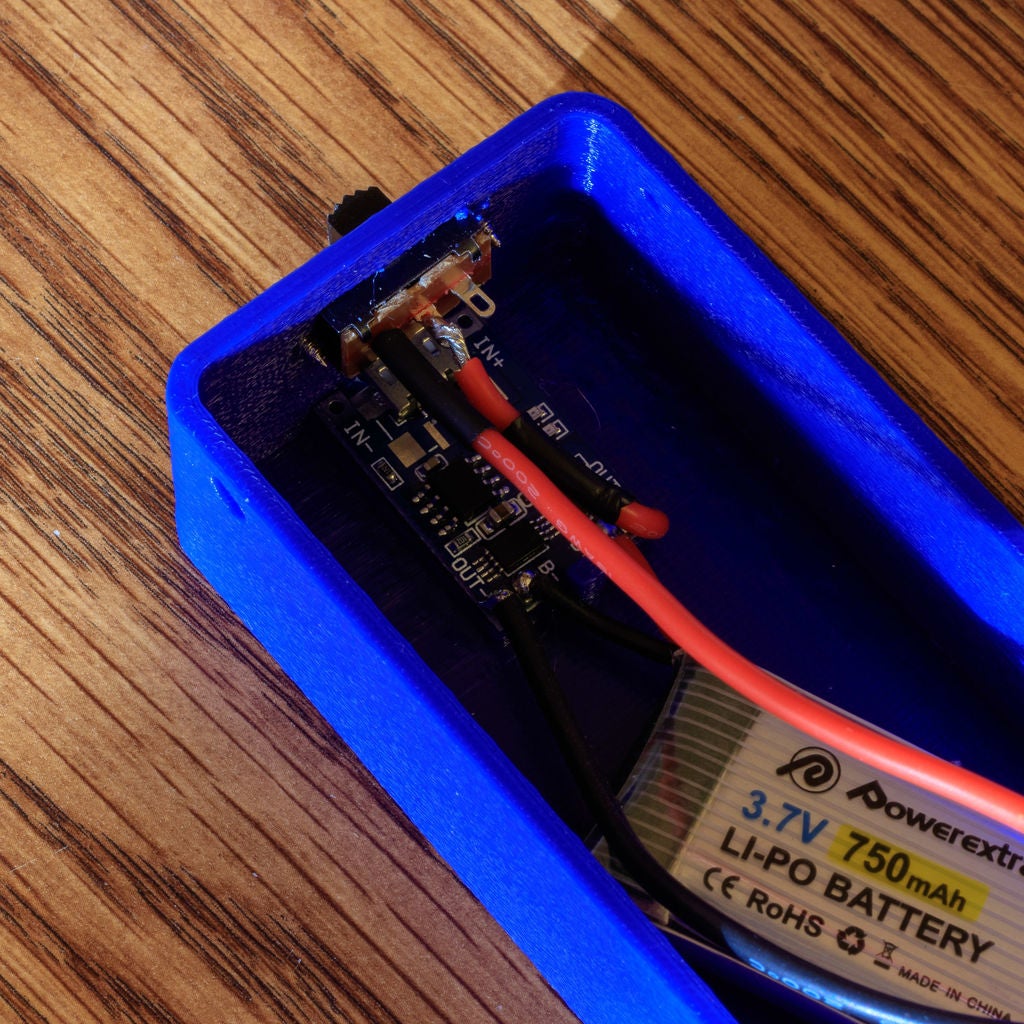
需要安装开关在将其连接到电池之前的情况。这是因为如果首先连接它,您将无法在不断开连接的情况下安装交换机。首先安装开关,然后安装预接线的TP4056和Li-Po电池,然后完成接线的接线。
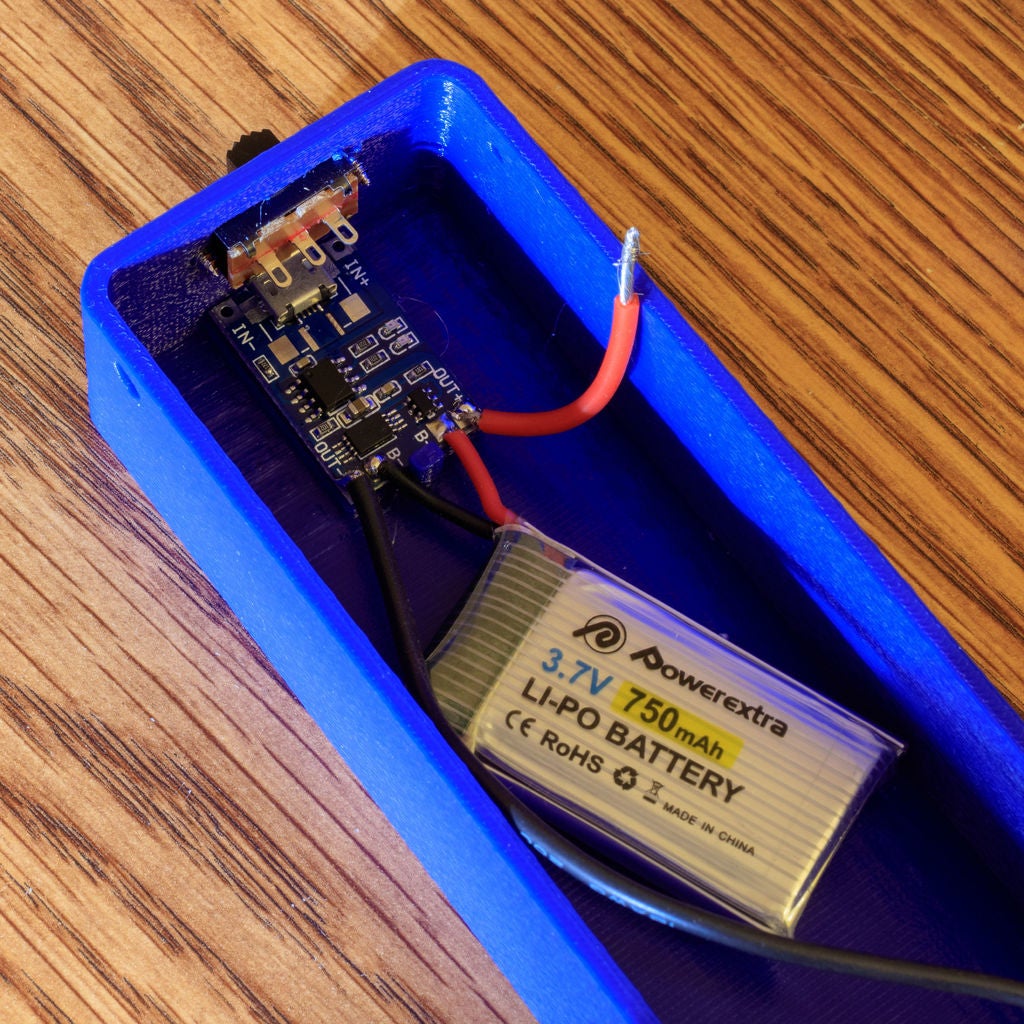
TP4056有4个接线垫:B +,B-,Out +,Out- 。您需要将电池连接到B +(正电压)和B-(接地)连接。 Out-connection用于连接到Arduino Nano的接地,Out +连接到交换机的一个引脚。然后将开关的第二个引脚连接到Arduino Nano的VIN上。
我的焊接工作不是最好的 - 我喜欢使用热缩管来覆盖和绝缘焊接接头。您会注意到,在这里的一个焊接连接处,热缩管受到焊接热的影响,并且在我能够移动之前它缩小了。
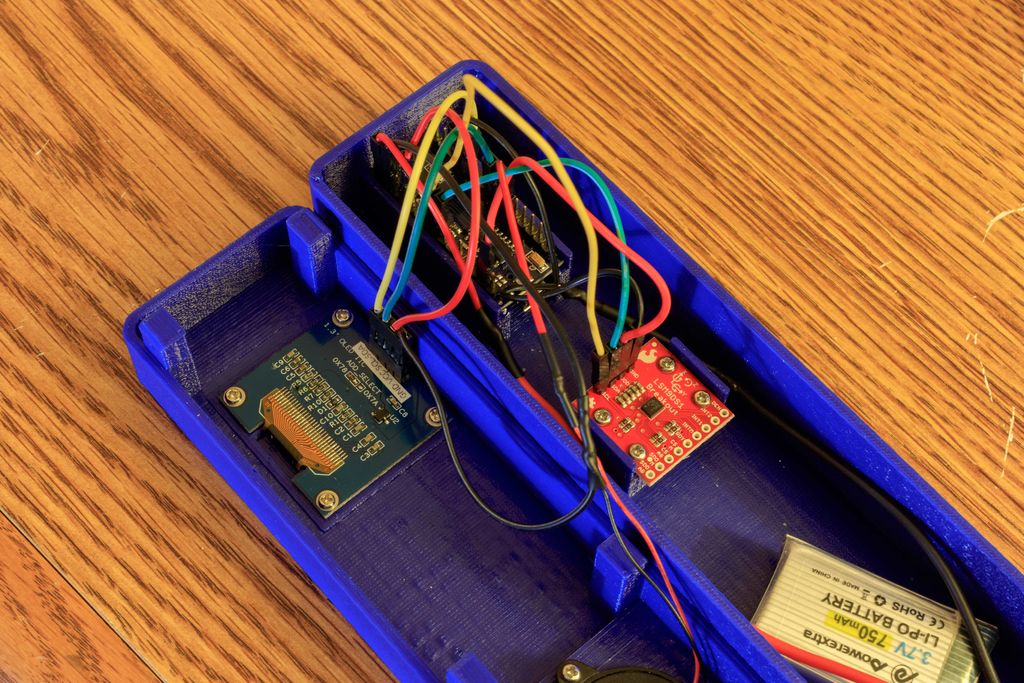
步骤8:安装和连接加速度计
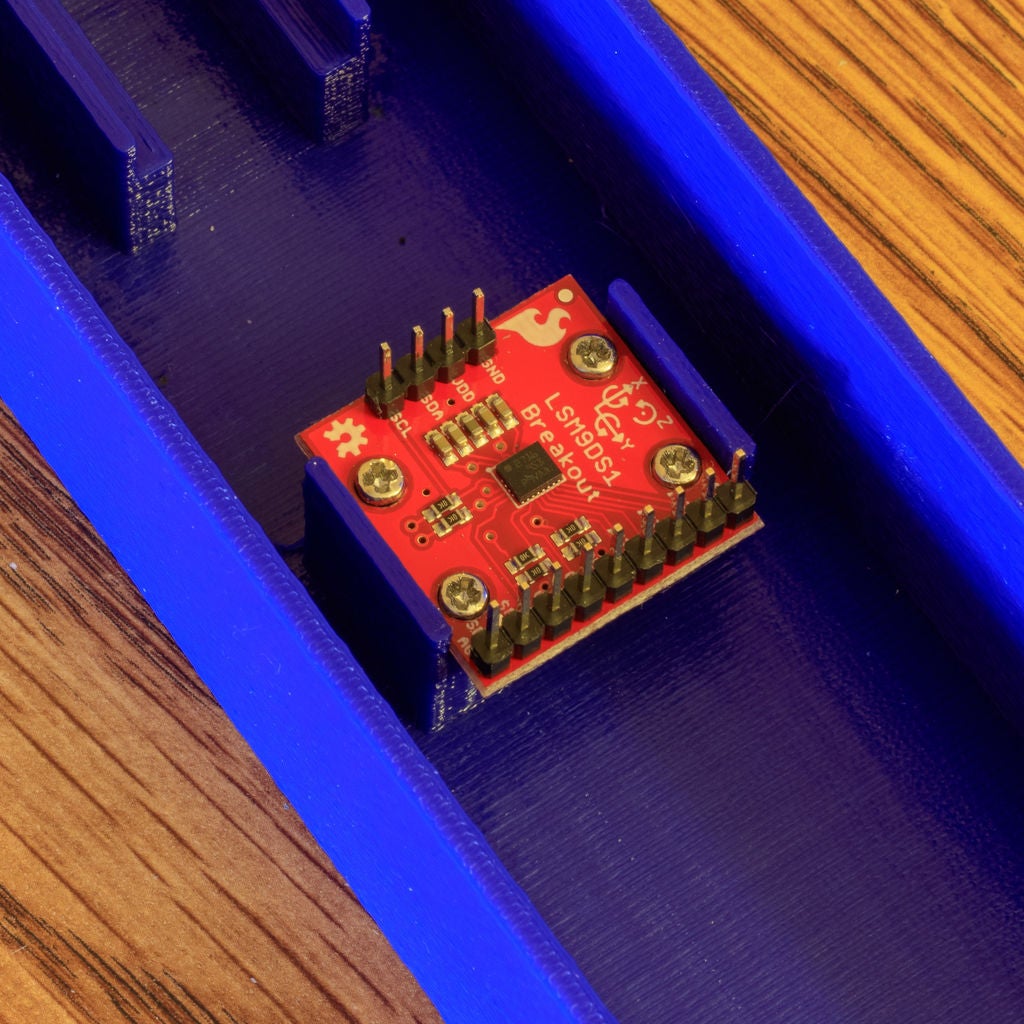
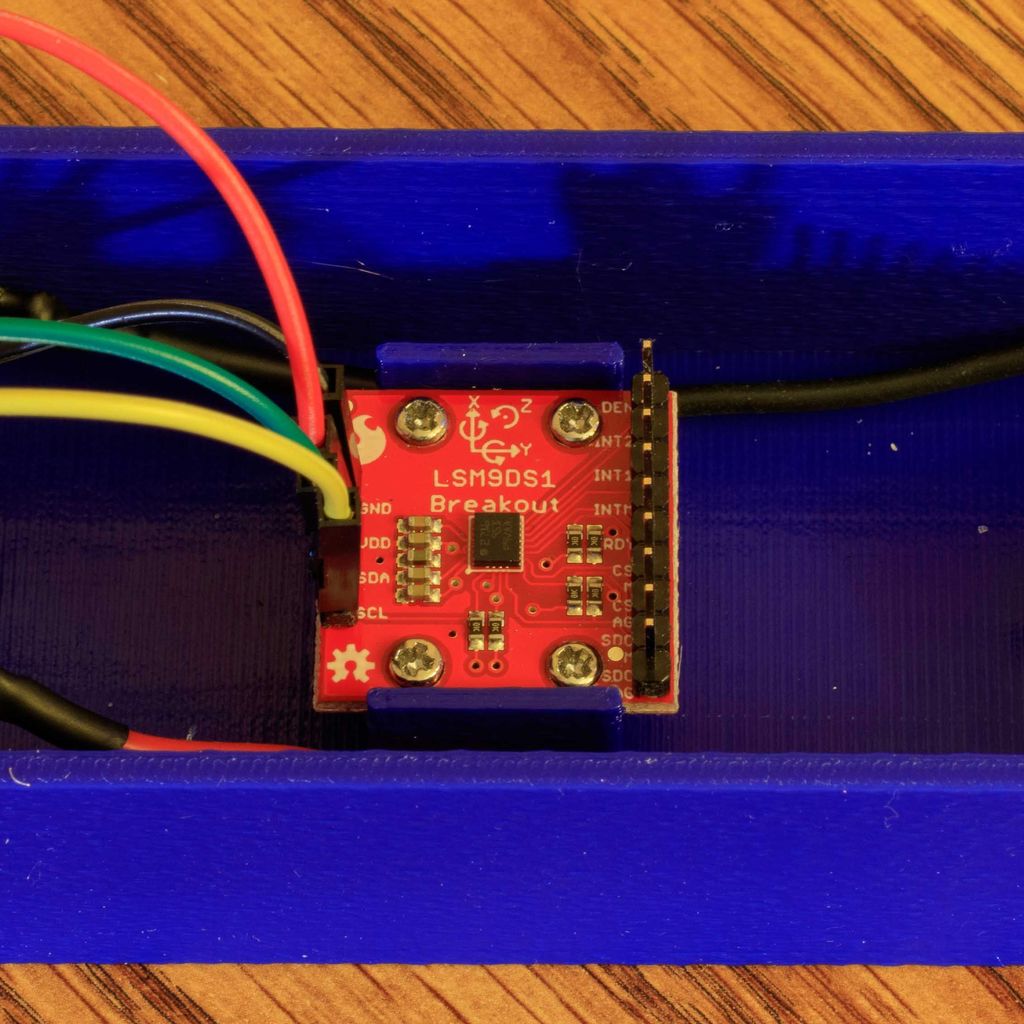
加速度计(LSM9DS1)安装在中间案件的下半部分。有4个引脚需要连接:VCC连接到Arduino Nano上的V5引脚; GND接地; SDA转到Arduino Nano上的A5引脚;并且SCL转到Arduino Nano上的A4引脚。
我使用了带有Dupont连接器的跳线进行接线,但如果您愿意,可以将导线直接焊接到引脚上。如果将导线直接焊接到引脚上,您可能需要在安装加速度计芯片之前进行此操作以使其更容易。
步骤9:通过连接Arduino Nano完成电子设备
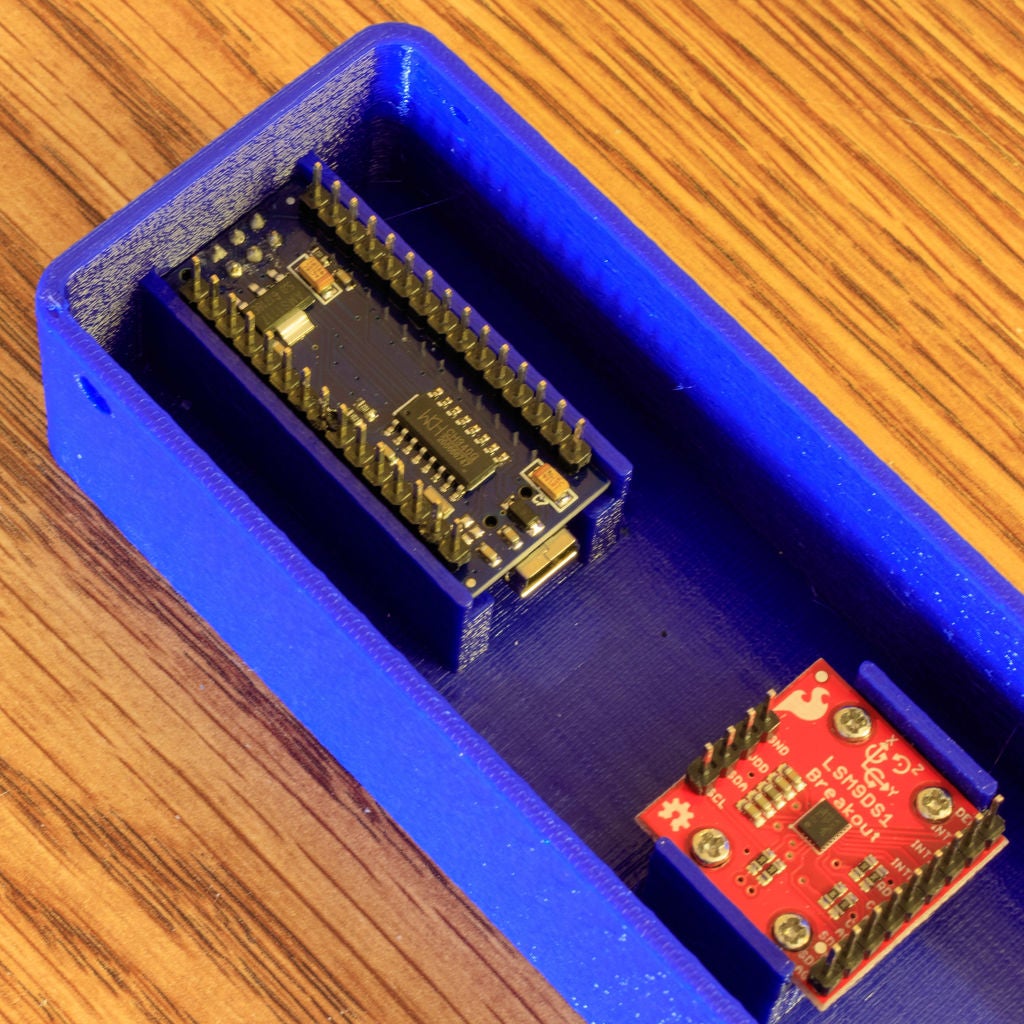
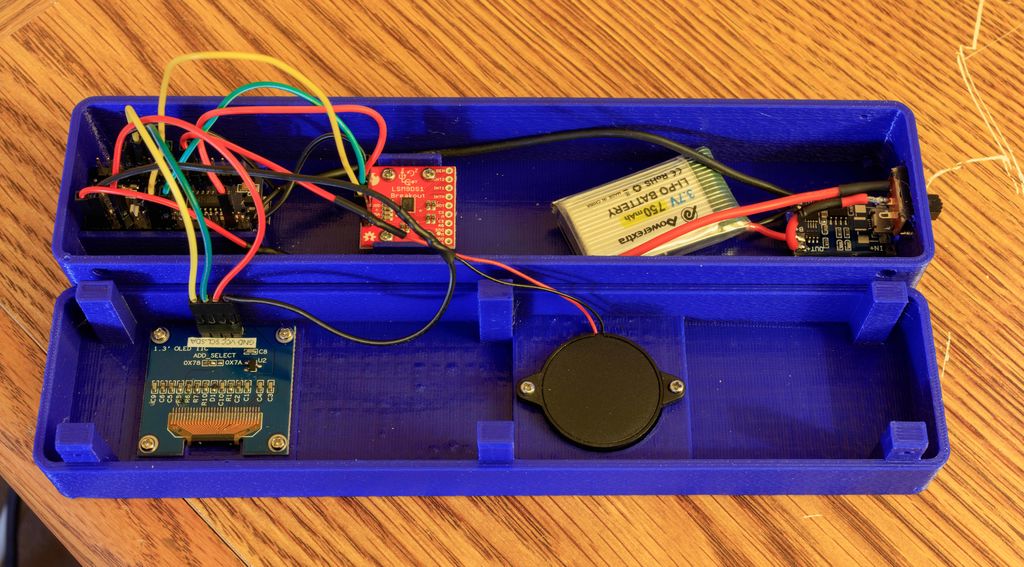
最终布线通过连接所有Arduino Nano的电气元件。这最好在安装Arduino Nano之前完成,以便USB端口可以进行校准以及任何其他最后一刻的软件更改。
首先将开关连接到Nano。正极(红色)从开关转到Nano的VIN引脚。电池的负极(黑色)将进入Nano的GND引脚。 Nano上有两个GND引脚,所有四个电气元件都有接地线。我选择将外壳底部的两个接地线连接到一个连接到其中一个GND引脚的引线。从外壳顶部的两个接地点组合成一个引线连接到其他GND引脚。
通过将加速度计上的VDD引脚连接到3V3,加速度计(LSM9DS1)可以连接到Nano纳米针。请勿将其连接到5V引脚,否则会损坏加速度计芯片。将SDA连接到Nano上的A4引脚,将SCL连接到Nano上的A5引脚。 GND引脚连接到Nano上的GND引脚(与电池的负极引线相结合)。
通过将显示器上的VCC引脚连接到OLED,可以将OLED LCD显示器连接到Nano。 Nano上的5V引脚。将SDA连接到Nano上的D2引脚,将SCL连接到Nano上的D5引脚。
最后,通过将红线(正极)连接到Nano上的D7引脚,可以连接扬声器。黑色线与OLED LCD显示屏的GND一起进入GND。
步骤10:校准
下载软件后,安装Arduino Nano,您可能需要校准您的水平。确保已安装加速度计板。使用螺钉安装应该会产生水平板,但是如果由于任何原因稍微关闭,校准将确保正确显示。
将底壳放在已知水平的表面上(使用气泡水平或其他方法)。读取X和Y的显示值。如果其中任何一个非零,则需要使用校准量更新软件。这可以通过将 xCalibration 变量或 yCalibration 变量设置为适当的量(显示的内容)来完成。
//
//根据需要设置这些变量的初始值为
bool displayF = true;//对于华氏度为真,对于摄氏度为假 xCalibration = 0 ;//用于平衡x轴的校准量zh yCalibration = 0 ;//用于平衡y轴的校准量
长irvCalibration = 1457;//内部参考电压的校准量
此时,您还应将 displayF 的值设置为适当的设置,具体取决于您希望以华氏度还是以摄氏度显示温度。
将软件重新加载到Nano上现在应该在已知级别的表面上读取0/0。
步骤11:安装Arduino Nano并组装案例
校准完成后,您可以将Arduino Nano安装在机箱中,将热胶涂在导轨上,并将Arduino Nano放在这些导轨上,将针脚朝上,USB端口朝向机箱内部。
现在可以将两半放在一起并使用4个M2x8盘头自攻螺钉组装包含所有电子元件的外壳。
步骤12:验证新数字电平的操作

确保Li-Po电池是带电。如果组装好外壳,您将无法直接看到充电LED指示灯。如果您想通过直接查看充电指示灯来验证充电操作,则需要打开外壳,但是您应该能够看到红色发光,表示在外壳关闭的情况下正在充电。
充电和组装,打开数字水平并验证其操作。如果它不工作,两个可能的故障点是OLED LCD显示器的接线和加速度计的接线。如果显示屏没有显示任何内容,请从OLED LCD接线开始。如果显示器工作正常,但H和V标签均显示0且温度为0(C)或32(F),则加速度计可能未正确接线。
第13步:最后的想法。..。..
我把这个数字水平(和Instructable)主要作为一种学习经验。对于我来说,在探索各种组件及其功能方面创建一个功能级别并不是那么重要,然后以增加价值的方式将它们组合在一起。
我会做出哪些改进?有几个我正在考虑将来的更新:
通过改变安装方式,将Arduino Nano的USB端口暴露在外壳中。这样可以更容易地更新软件(在任何情况下都应该很少)。
使用木丝3D打印表壳。我一直在试验Hatchbox Wood灯丝,我对我得到的结果非常满意。我认为这将为 DigiLevel 提供更好的整体外观。
更新设计以使用MPU-9250加速度计降低成本,同时不影响功能。
-
水平仪
+关注
关注
0文章
13浏览量
9663
发布评论请先 登录
从粗调到精调:铸铁试验底座的安装调试的8个步骤
平台晃动、对位不准?T 型槽专属固定方法来了
多轴陀螺仪怎么选?

探索SCL3400-D01数字双轴倾角仪:高精度与稳定性的完美结合
池州JG08/04Z-D/SG系列八+四轴组合测径仪
基于MEMS技术的双轴倾角仪:开启电子传感新时代
TMC5041:单芯片双轴步进电机驱控方案,赋能精密静音运动控制

从桥梁监测到无人机调平:双轴倾角传感器的无限可能
华盛昌LM-02T/LM-16T激光水平仪介绍
为什么三轴MEMS陀螺仪是无人机飞控系统的核心传感器?


自动化新宠来袭——XY双轴直线模组大揭秘
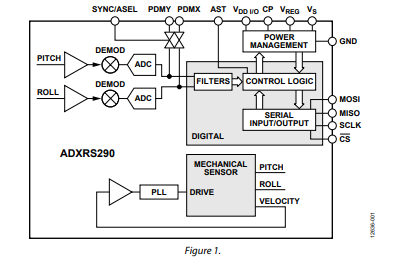
ADXRS290用于稳定应用的超低噪声、双轴MEMS陀螺仪技术手册




评论