 便携式Arduino机器人的制作方法
便携式Arduino机器人的制作方法

耗材:
1 Arduino Nano
1 600 mAh电池
1电路专家微型开关
1电路专家开/关开关
1 10K欧姆电阻
6 2x4六角螺钉
步骤1:3D打印


Bot外壳和Bot的腿应该印有支撑,但是,因为支撑只能在内部这将保留Bot完成后看起来更好。
我使用CEL Robox 3D打印机打印该项目的所有部件。所有部件都印有30%填充,我使用CEL PETG高清玻璃设计师灰色,CEL PETG高清玻璃透明红色。
第2步:微开关

微型开关已经存在,但最近它成为人们关注的焦点。现在我们可以在3D打印机,机器人项目,真空机器人等中找到这些微型开关。有人可能会说你不需要为这么小的项目进行切换,但是,我打赌不同。开关可用于多种用途,它可用作传感器测试的表示,或AI培训师; D.我稍后会谈谈这个AI培训师。
首先,当我读到有关微型开关的信息时,我认为它会像普通的开/关开关一样工作,我错了微动开关需要一点工作而不仅仅是一个直接的即插即用。如果你是所有这些的新手,不要担心我是新手,如果我能做到你可以做到:)。
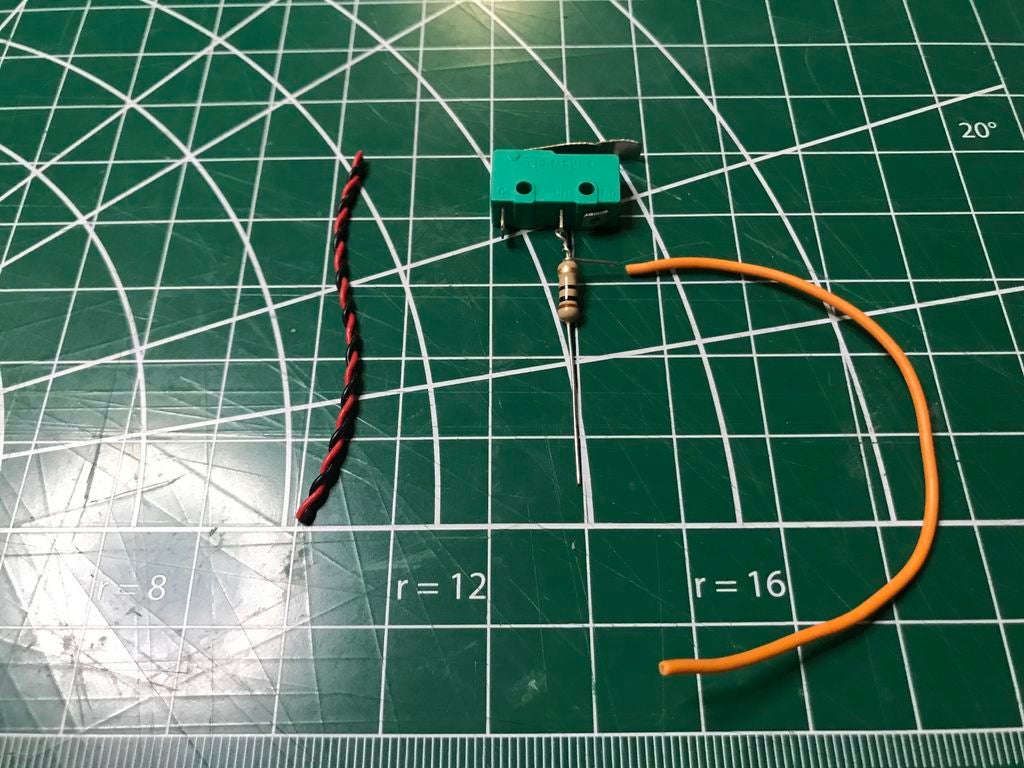
从我自己的经验然后令人困惑的部分是开关有3条腿,我们只使用2,但最后,我们将有3条线从交换机出来。然而,在经过多次反复试验之后,我认为我已经将其解决了,我会确保它尽可能直截了当。
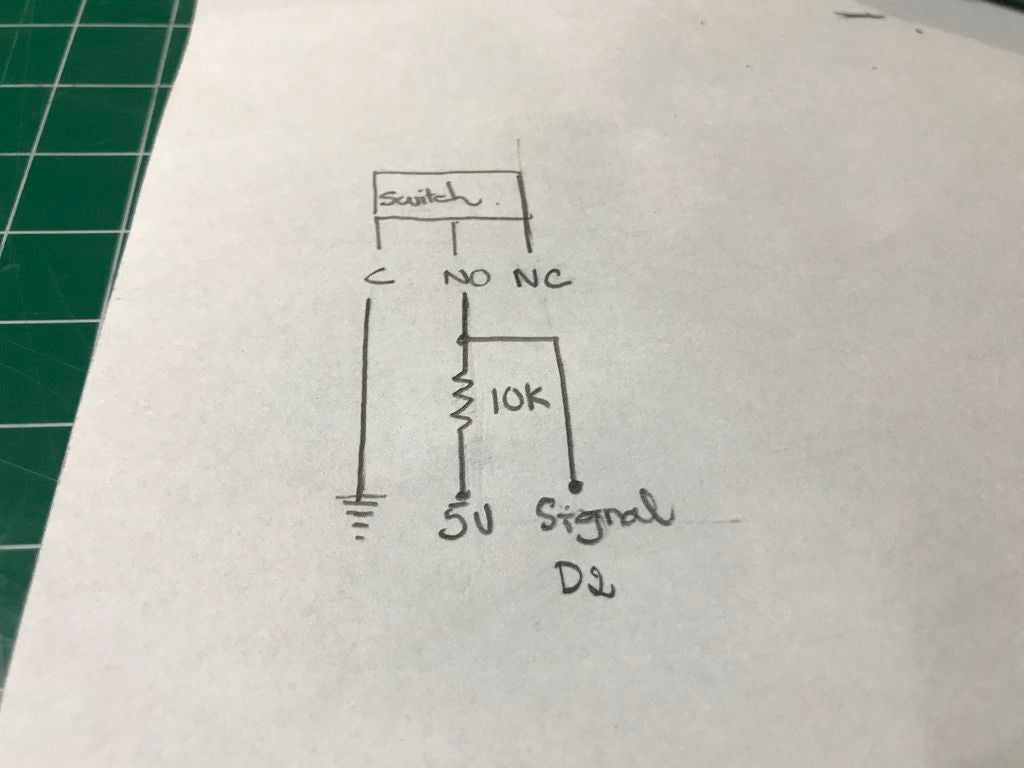
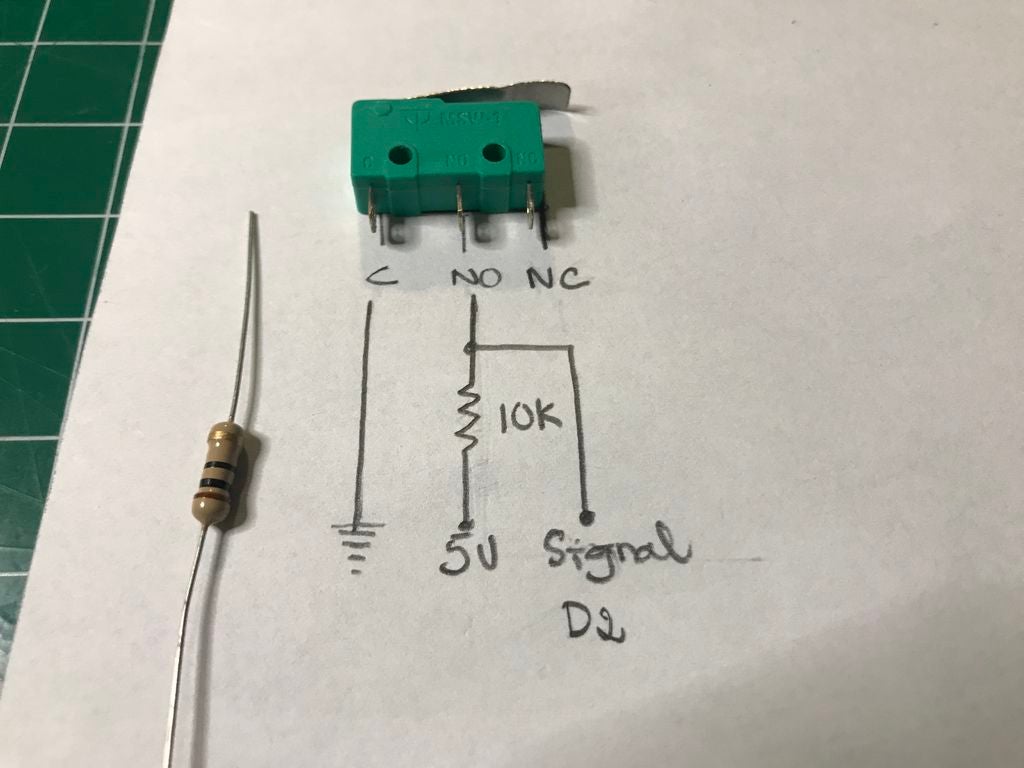
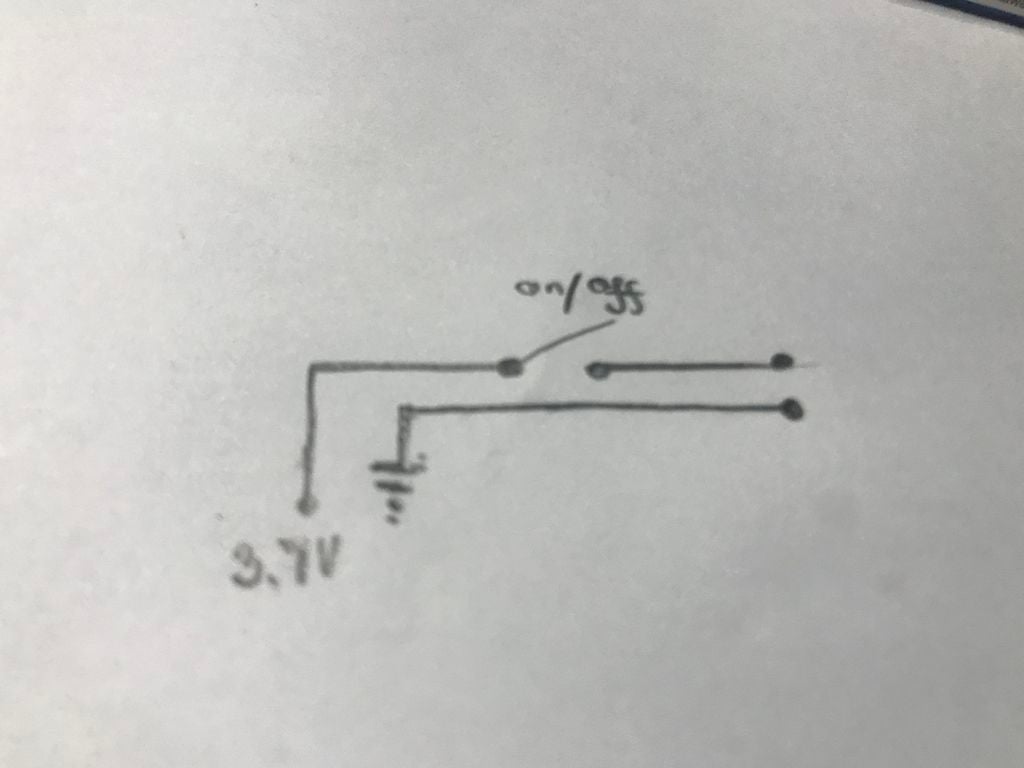
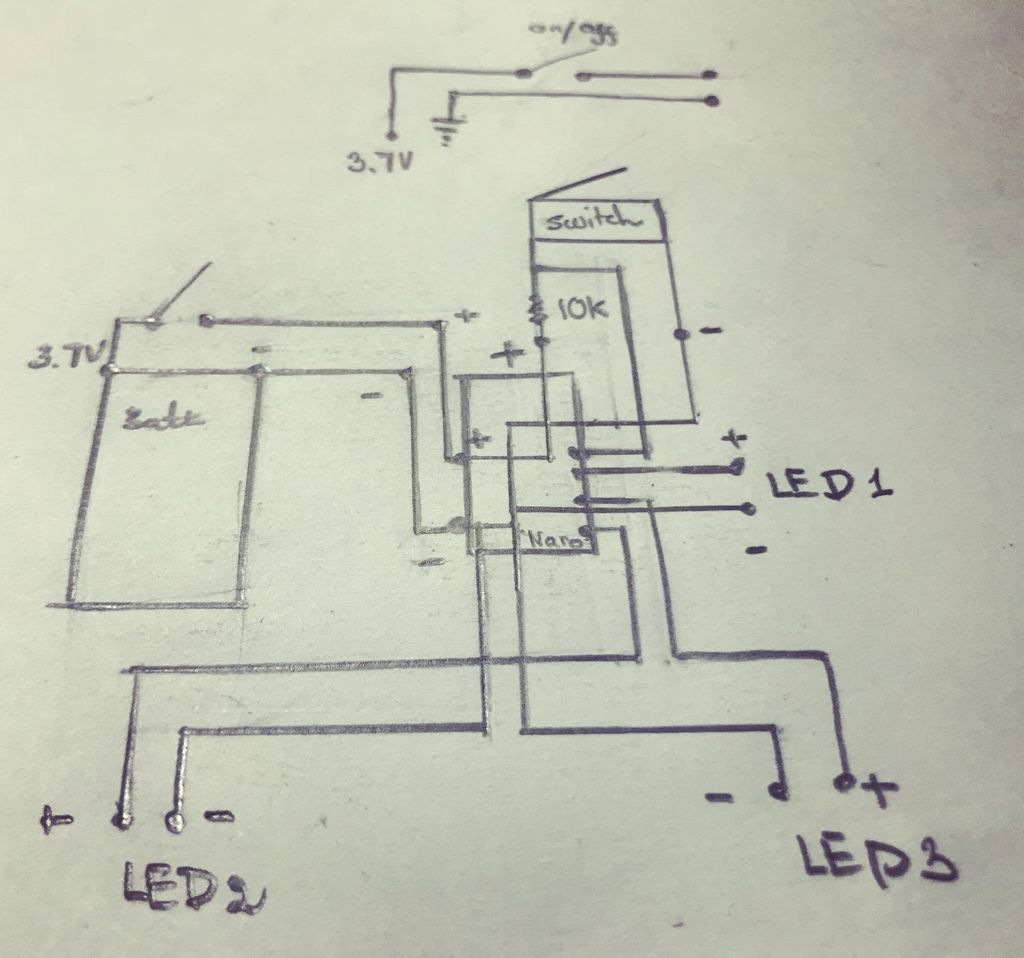
交换机有3个引脚:C,N0,NC。我们只使用C和N0。
1。 C接地线
2。在继续之前阅读注意事项:N0将有1根电线从它出来而不是2.我多次犯了这个错误并最终导致信号错误。有主线和侧线,如果你在N0焊接这两根线,很可能你的信号不可读或不稳定。
3。主线将N0连接到10K电阻,然后10K电阻将成为开关的电源。
4。侧线将连接到10K电阻和N0之间的主线。这是我们收集信号的地方,以便保持数据线清洁的重要性。
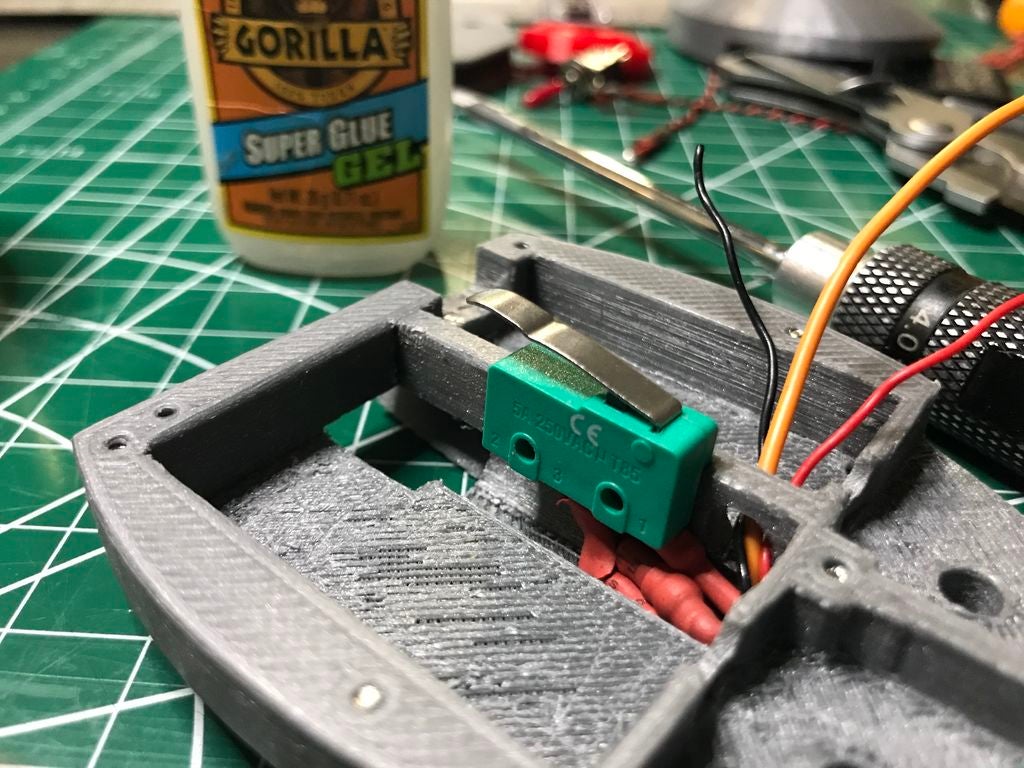
5。将微型开关粘贴到位并确保给它时间完全干燥。
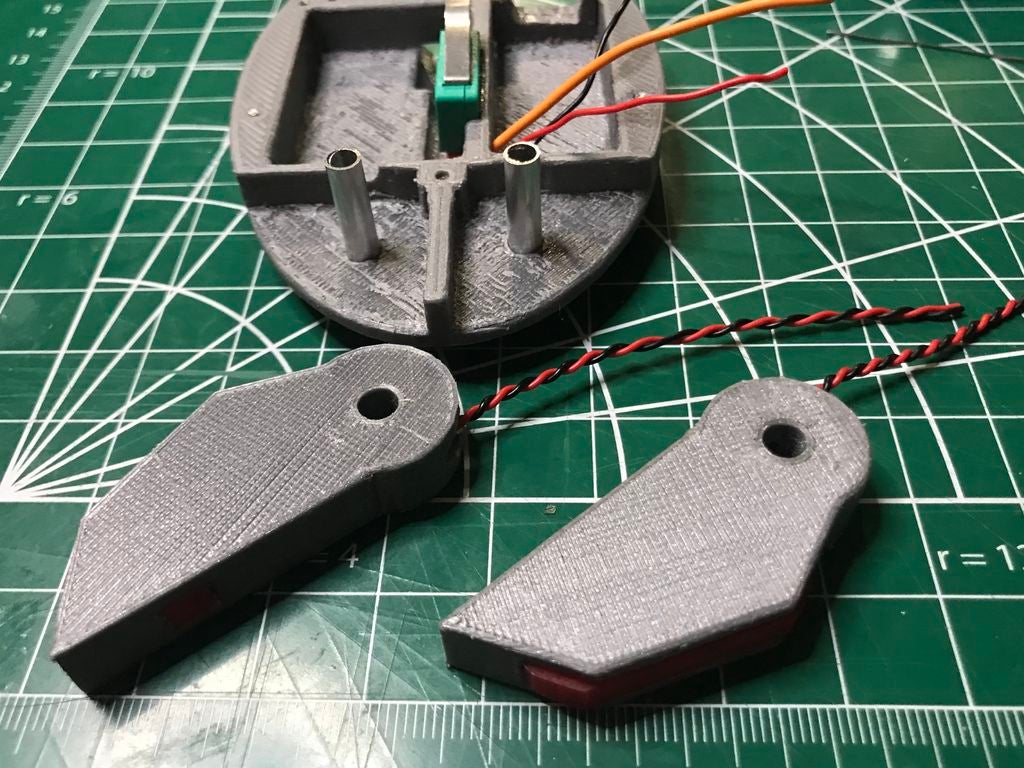
步骤3:腿LED




这是3D打印的真正力量。腿具有用于电线和LED的内部腔室。设计中的挑战之一是腿是可移动的。 3D打印技术为我提供了一个简洁的解决方案,我有一个内部腔室供电线穿过。
我使用Adafruit LED亮片作为其紧凑型电路板上的电阻器,以实现最大的空间效率。我们所要做的就是将电源和地线焊接到电路板上。包裹LED的热量是可选的,但是如果您将该项目靠近自来水源进行平面加热,则强烈建议使用热包装。
1。将LED插入支腿
2。将LED固定,确保LED朝上以获得最大照明。
3。将腿部面板插入每个腿部,最好使用透明的材料打印这部分光线可以轻松穿过的部分。
第4步:安装腿

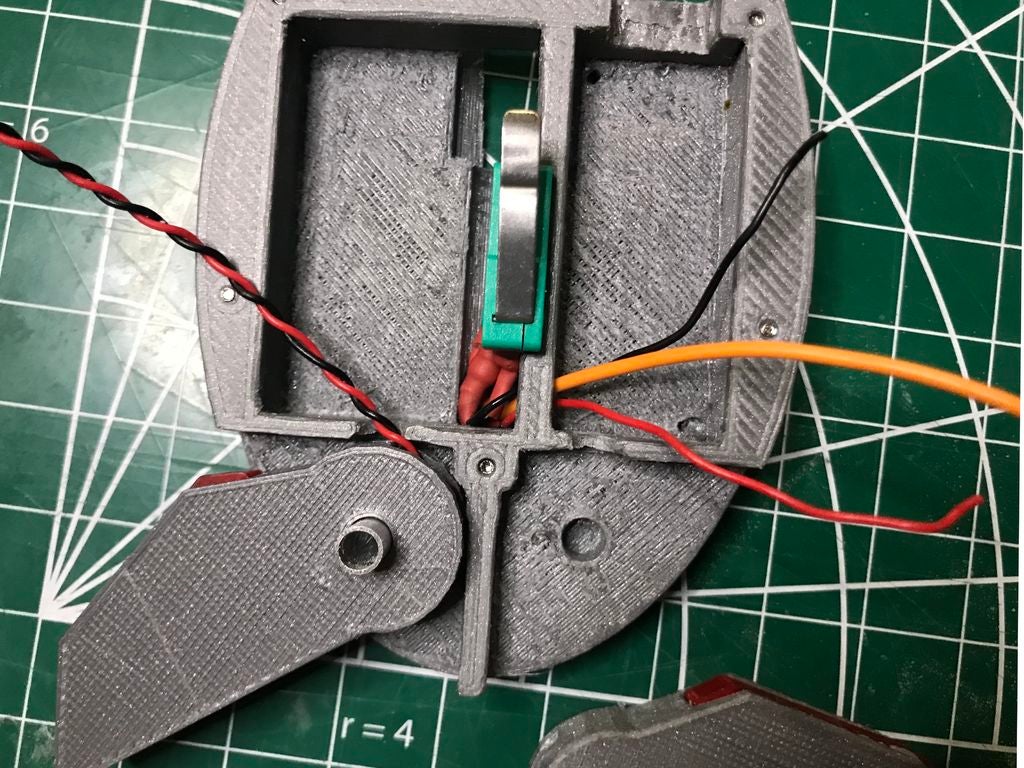

我从当地的一家爱好商店购买了这些5毫米铝管。你也可以3D打印这些钉或木钉工作得很好。
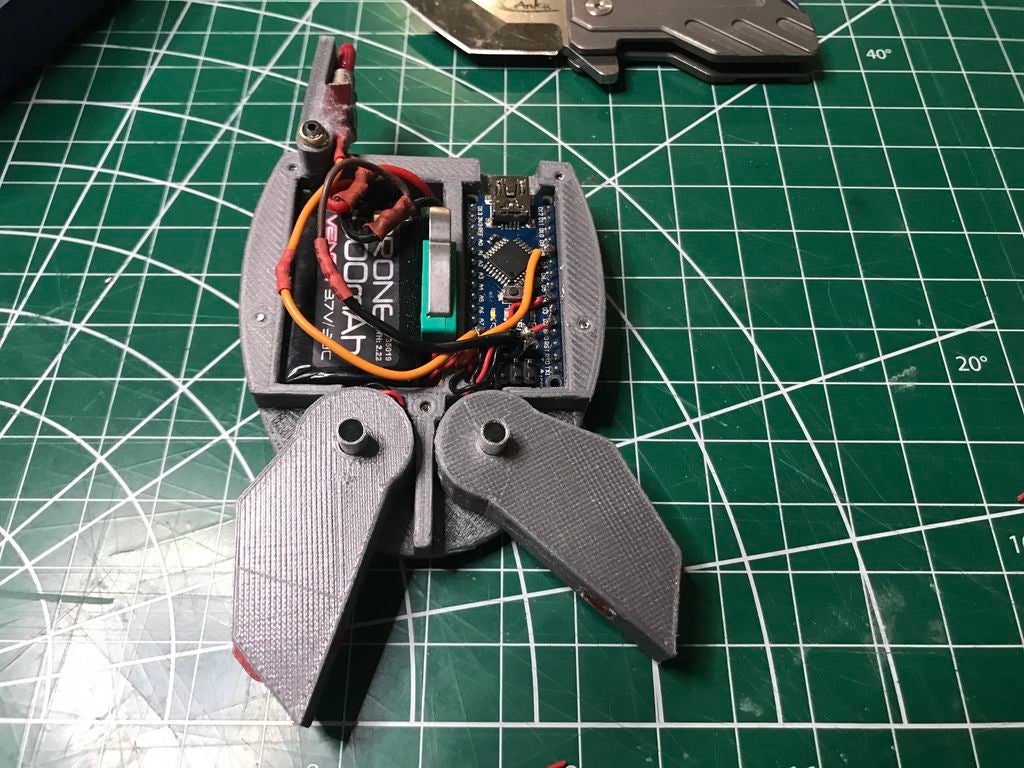
1。从每条腿到右边的部分运行电线,它将容纳Arduino Nano。
2。确保腿部自由移动
步骤5:开/关开关


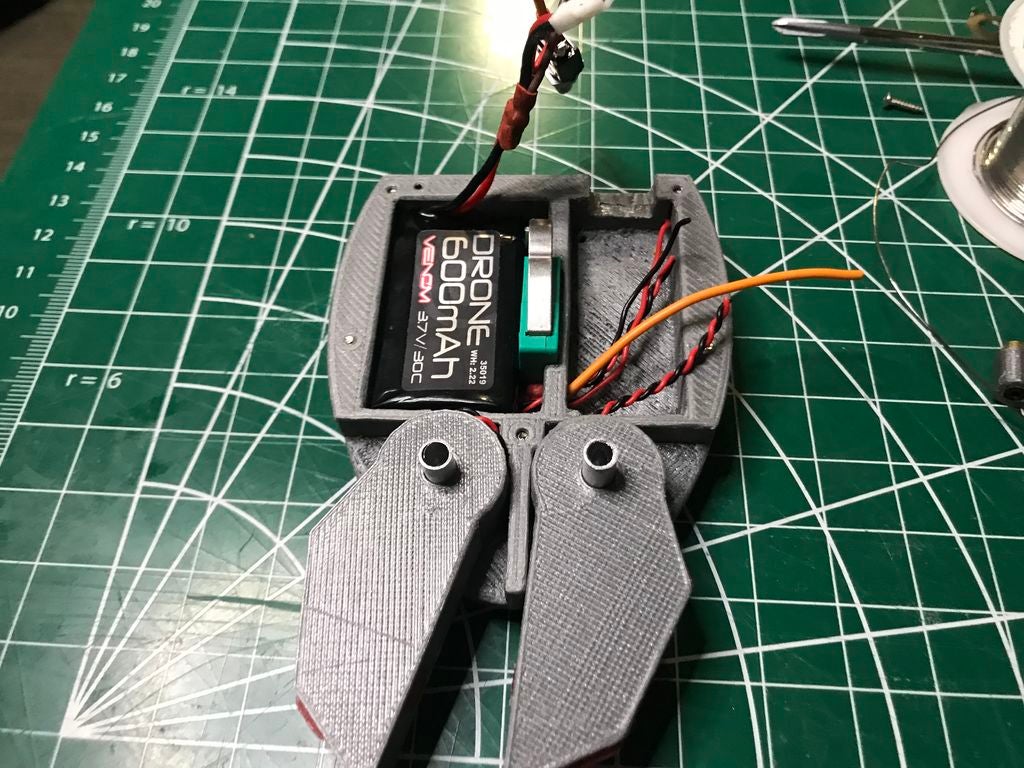
开/关开关比微动开关简单得多。这种类型的开关就像一个水闸,我们只需将开关连接到带电池的电路系列。然后开关将粘到翻盖门上。
确保给它足够的电线,以便可以打开和关闭翻盖门。
请观看组装视频,以便更好地了解如何将机器人放在一起。
第6步:编码和测试



我建议将PA_Calibration代码上传到机器人以测试腿LED。这将确保我们为正确的LED分配正确的引脚编号。
int ChestLED = 3 ;
int LLegLED = 2 ;
int RLegLED = 4 ;
int LED_INDEX[3]={3,2,4}; // Chest LED, Left Leg LED, Right Leg LED
校准代码将使LED和胸部LED指示灯闪烁,以测试确保引脚未切换,您可以将HIGH更改为LOW以关闭LED以进行双重检查。
void loop()
{
digitalWrite(LED_INDEX[1], HIGH); //LOW
digitalWrite(LED_INDEX[2], HIGH); //LOW
}
校准并仔细检查后,我们可以关闭顶部并将胸部安装到前面,将所有螺钉对齐,并将前后连接在一起的6个2mm六角螺钉。
PAB_Basic代码提供了一些更多的操作功能,如:Blink Chest LED,Excited mode,Disco mode。你可以通过不常见的和普通的其他方式尝试这些模式。要让机器人在不同的时间做不同的事情,需要更多的编码。
void loop()
{
XChestBlink();
//XExcited();
//XDisco();
}
PAB_Randoaccordinglym代码提供了一个随机值,如果你分配给一个动作的值,机器人将做出相应的反应。通过赋值,具有更多价值的任务使其更有可能发生。
int Randomness = random(1,600);
if(Randomness == 150 ){XExcited();}
if(Randomness == 250 ){XChestBlink();}
if(Randomness == 350 ){XDisco();}
if(Randomness == 450 ){XDisco();}
if(Randomness == 550 ){XDisco();}
随机性可能很愚蠢,然而,它是环境随机变化的绝佳代表,例如太阳被云或环境中的潮湿变化所覆盖等等。这是使这个机器人成为许多科学项目的测试平台的关键方法。
第7步:完成整理,下一步是什么?

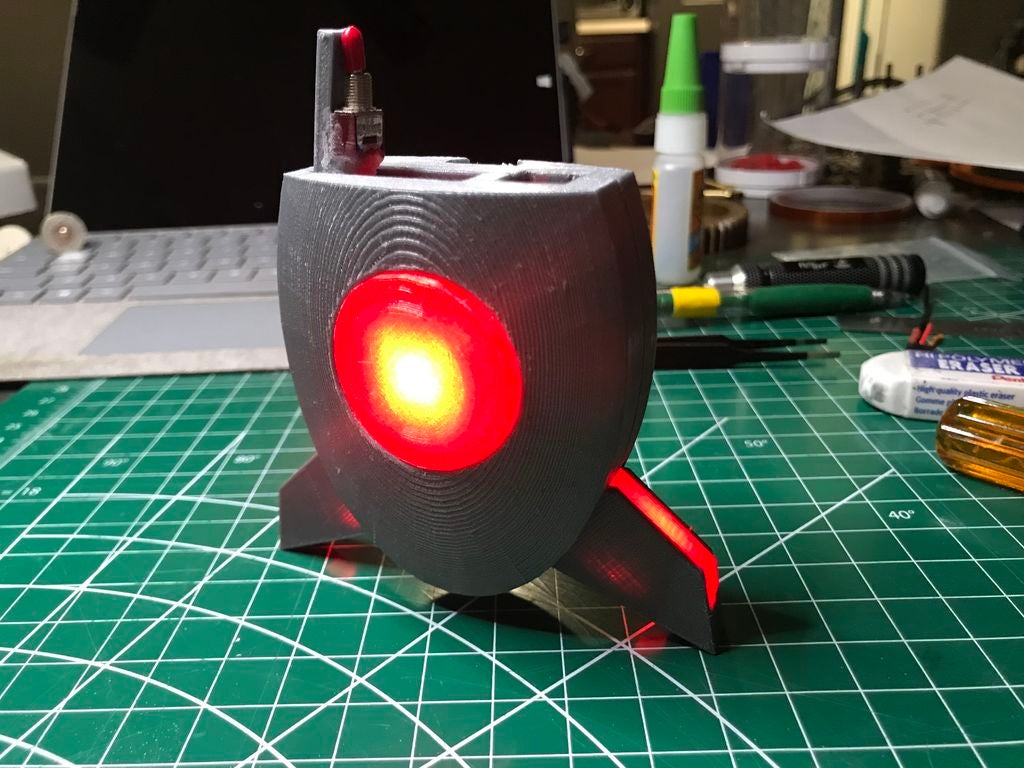
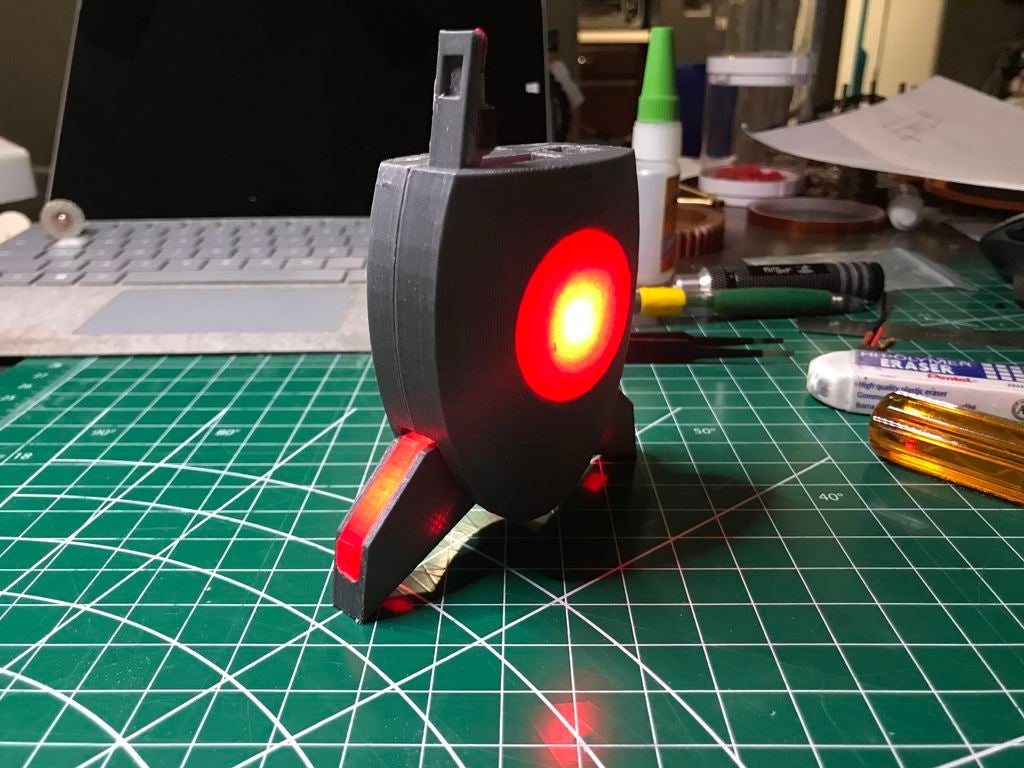

Bot可以作为便携式测试平台使用,随身携带,作为科幻定制的一部分。
但是,您也可以安装更多的传感器适合你的项目。例如,我的另一个PAB我安装了一个带10K欧姆电位器的蜂鸣器。我能够让机器人生成随机声音模式,使用微动开关作为输入来训练机器人制作更好的声音模式,或者有时Bot会唱星球大战主题曲。
你也可以无线,电路专家携带ESP 32 Wifi和蓝牙 - 链接。这个主板需要有关如何将代码上传到主板的额外知识,但是,该主板具有内置的Wi-Fi和蓝牙模块,并且与Arduino Nano具有相同的尺寸,因此您无需对机器人进行太多修改外壳
-
机器人
+关注
关注
213文章
30654浏览量
219889 -
Arduino
+关注
关注
190文章
6516浏览量
196065
发布评论请先 登录





 工商网监
工商网监
评论