 如何制作智能手机控制的Arduino机器人车
如何制作智能手机控制的Arduino机器人车

第1步:所需的零件和工具
1。 4WD机器人底盘套件
2。 Arduino Uno
3。 LM298 H桥模块
4。蓝牙模块HC-05
5。 12v锂电池
6。男女跳线
7。男 - 男跳线
8。管道胶带或任何其他胶带9.智能手机
步骤2:结构/机箱
您可以购买现成的4WD汽车底盘或者您可以使用PVC/任何类型的硬板制作它。
步骤3:电机/执行器
在此项目我使用6v直流电机。您可以使用任何类型的6v直流电机。
步骤4:准备电机端子
切割4根长度约为5至6英寸的红色和黑色电线。
可以使用0.5平方毫米的电线。
去除绝缘层从每端的导线焊接电线到电机端子
您可以通过将电机连接到电池组来检查电机极性。如果它正向旋转(红线带正极和黑线带负极电池的端子)然后连接正确。
步骤5:安装电机并安装顶部顶盖
步骤6:控制器
Arduino UNO是一个开源微控制器该板基于Microchip ATmega328P微控制器,由Arduino.cc开发。
该板配有多组数字和模拟输入/输出(I/O)引脚,可与各种扩展板连接rds(盾牌)和其他电路。该板具有14个数字引脚,6个模拟引脚,可通过B型USB电缆与Arduino IDE(集成开发环境)进行编程。它可以通过USB电缆或外部9伏电池供电,但它可以接受7到20伏之间的电压。它也类似于Arduino Nano和Leonardo。硬件参考设计在Creative Commons Attribution Share-Alike 2.5许可下分发,可在Arduino网站上获得。还提供某些版本硬件的布局和生产文件。 “Uno”意为意大利语,并被选中用于标记Arduino Software(IDE)1.0的发布。 Arduino软件(IDE)的Uno板和版本1.0是Arduino的参考版本,现在已经发展到新版本。 Uno板是USB Arduino板系列中的第一块,也是Arduino平台的参考模型。 Arduino Uno上的ATmega328预编程了一个引导加载程序,允许在不使用外部硬件编程器的情况下上传新代码。[3]它使用原始STK500协议进行通信。 Uno与所有前面板的不同之处在于它不使用FTDI USB到串行驱动芯片。相反,它使用编程为USB转串口转换器的Atmega16U2(Atmega8U2至R2版本)。
微控制器通常使用编程语言C和C ++的功能方言进行编程。除了使用传统的编译器工具链之外,Arduino项目还提供了基于Processing语言项目的集成开发环境(IDE)。
步骤7:H Bridge(LM 298模块)
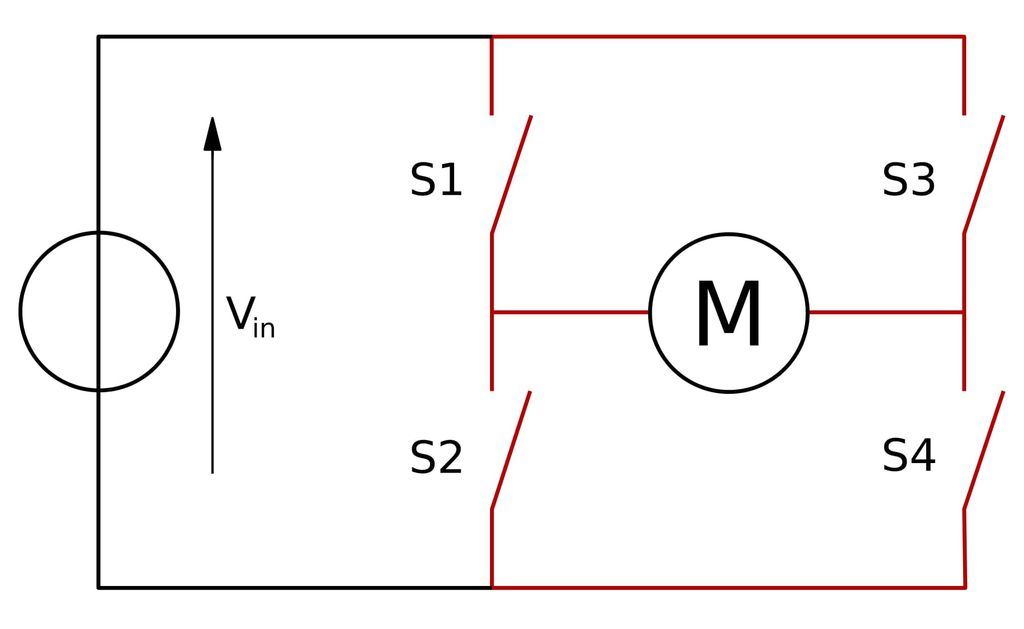
什么是H桥?
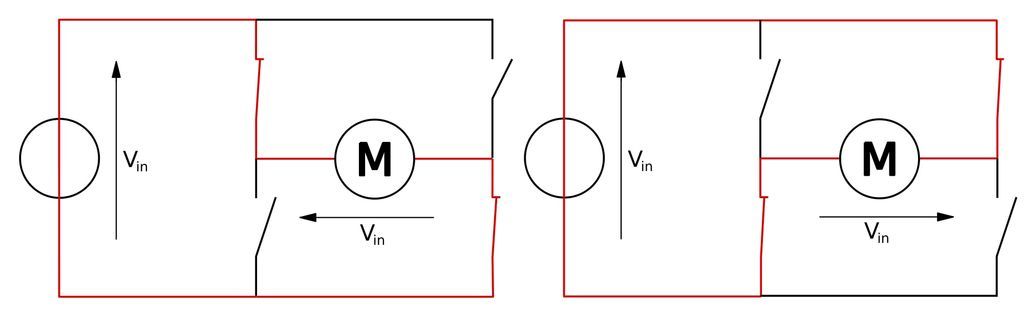
术语H桥是从这种电路的典型图形表示中得出的。它是一个可以正向和反向驱动直流电机的电路。工作:请参见上图了解H桥的工作情况。
它由4个电子开关S1,S2,S3和S4(晶体管/MOSFET/IGBTS)组成。当开关S1和S4闭合(并且S2和S3断开)时,将在电动机上施加正电压。因此它向前旋转。类似地,当S2和S3闭合并且S1和S4打开时,反向电压在电机上施加,因此反向旋转。
注意:同一臂(S1,S2或S3,S4)中的开关永远不会同时闭合,会导致死机短路。 H桥可用作集成电路,或者您可以使用4个晶体管或MOSFET构建自己的桥。在我们的例子中,我们使用LM298 H桥IC,可以控制电机的速度和方向。
引脚说明:
输出1:直流电机1“+”或步进电机A +
输出2:直流电机1“ - ”或步进电机A-
输出3:直流电机2“+ “或步进电机B +
输出4:电机B导出
12v引脚:12V输入但可以使用7至35V
GND:接地
5v引脚:5V输出,如果12V跳线到位,非常适合为Arduino(等)供电
EnA:为电机A启用PWM信号(请参阅“Arduino草图注意事项”部分)
IN1:使能电机A
IN2:使能电机A
IN3:使能电机B
IN4:使能电机B
EnB:为电机B启用PWM信号
步骤8:电源
可以使用这些电池:
1。 AA碱性电池(不可充电)
2。 AA NiMh或NiCd电池(可充电)
3。锂离子电池
4。 LiPo电池
步骤9:电气接线
对于接线,您需要一些跳线。
连接两个电机的红线(每侧) )将黑线连接在一起。
所以最后你的每一面都有两个端子。 MOTORA负责两个右侧电机,相应地两个左侧电机连接到MOTORB按照以下说明连接所有电源。
电机连接:
Out1 - 》左侧电机红线(+)
Out2 - 》左侧电机黑线( - )
Out3 - 》右侧电机红线(+)
Out4 - 》右侧电机黑线( - )
LM298 - 》 Arduino
IN1 - 》 D5
IN2-》 D6
IN2 - 》 D9
IN2-》 D10
蓝牙模块 - 》 Arduino
Rx-》 Tx
Tx - 》 Rx
GND - 》 GND
Vcc - 》 3.3V
电源:
12V - 》连接电池红线
GND - 》连接电池黑线和Arduino GND引脚
5V - 》连接到Arduino 5V引脚
步骤10:控制逻辑
步骤11:软件
软件部分非常简单,它不需要任何库。如果您在前面的步骤中理解了逻辑表,那么您可以编写自己的代码。我没有花太多时间编写代码,所以只使用别人编写的代码。为了控制机器人车,我正在使用智能手机。智能手机通过蓝牙模块连接到控制器(HC -06/05)下载应用程序安装应用程序后,您必须将其与蓝牙模块配对。配对密码为“1234”。
第12步:Arduino代码
==》 Arduino代码
-
智能手机
+关注
关注
66文章
18674浏览量
185611 -
机器人
+关注
关注
213文章
30654浏览量
219905 -
Arduino
+关注
关注
190文章
6516浏览量
196067
发布评论请先 登录
CW32L012小型机器人控制评估板活动 四足机器人+智能小车 开箱评测
高精度机器人控制的核心——基于 MYD-LT536 开发板的精密运动控制方案
傲琪人工合成石墨片: 破解智能手机散热困境的创新解决方案
工业机器人的特点
盘点#机器人开发平台
详细介绍机场智能指路机器人的工作原理
【「# ROS 2智能机器人开发实践」阅读体验】+内容初识
智能手机业务狂揽577亿!蓝思科技押注AI与机器人,净利暴涨近20%





 工商网监
工商网监
评论