 关于MATLAB图像分析在优化飞行轨迹方面的作用分析
关于MATLAB图像分析在优化飞行轨迹方面的作用分析

在看到冥王星萌萌爱意前一年,“新视野”号探测器对机载相机拍摄的照片进行图像处理以实现优化飞向冥王星的轨道,NASA称这一过程为Opnav(optical navigation,光学导航)。
从2014年7月20日开始至今,“新视野”号搭载的三个科学用相机拍摄了近800张照片,并把这些照片传送回地球,交由两个导航团队进行处理分析。PNAV(项目导航)团队使用MATLAB软件,负责主导航任务。INAV(独立导航)团队使用Fortran和c语言编写进行处理。
对比两个系统在飞越木星过程中的表现,发现PNAV和INAV导航系统效果一致,结果可靠。
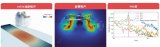
飞越木星测试中的木卫十七图像
(图片来源:“Optical Navigation Preparations for NewHorizons Pluto Flyby”)
图像分析和优化应用于导航
图像处理和优化方法用于及时确定冥王星及其卫星的精确位置,可以尽早完成对航向的精确修正,并为“新视野”号之后的飞行节省很多燃料。
决定冥王星轨迹的三大挑战:
当探测器离目标很远时,拍摄的低分辨率照片限制了计算精度;
冥王星的大小、形状和表面亮度变化及其卫星并不为我们熟知,在计算时需要考虑误差和补偿;
在计算时需要考虑光速,探测器运动的影响,以及相机拍摄时的指向漂移;
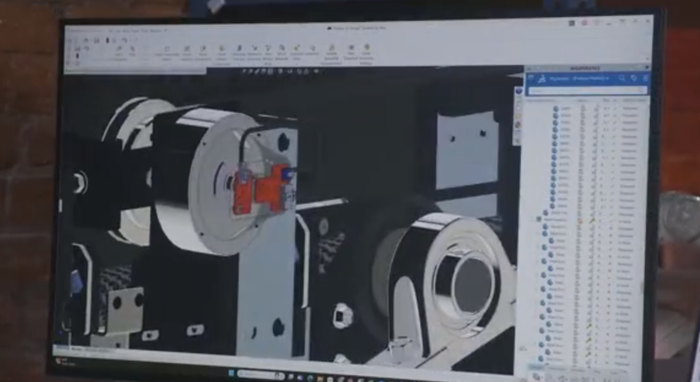
MATLAB SPICE工具包
PNAV团队使用MATLAB版本的NASASPICE工具包完成通过图像处理实现对探测器飞行轨迹的优化。
这一工具包在多行星任务中用于确认:
探测器的位置;
探测器及其仪器的指向;
观察目标的位置、大小、形状和方向;
探测器或地面上可能会影响科学观测的事件;
主要导航分析步骤
确定前往冥王星的最佳路径需要三个步骤:
找到视野中心的星并与天文星表匹配;
确定探测器的姿态和指向;
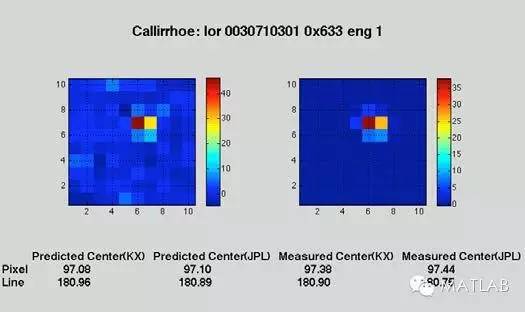
寻找观测目标 (冥王星及其卫星) 的中心;
冥王星和卡戎星拍摄图像(拍摄时间:2015年4月12-18日)
首先,通过匹配滤波处理将天文图表与拍摄照片相匹配,找出所摄视野方位;再由图像配准技术确定探测器姿态,补偿在拍摄图像时探测器x和y方向上的漂移和旋转;然后,通过搭建目标模型与拍摄图像的互相关性寻找目标(冥王星及其卫星)中心。随着探测器的不断靠近,冥王星的大小,形状,及其卫星的表面亮度的变化数据不断更新,目标模型也就更加精准,最终完成对“新视野”号探测器的路径导航优化。
其中PNAV团队基于图像处理的算法使用MATLAB以及SPICE工具包完成计算,而INAV团队则基于非线性最小二乘算法,使用Fortran和C语言编写实现对“新视野”号的导航。
与其他使用两个独立导航程序的系统一样,“新视野”号探测器导航系统的每一个分析步骤都使用两种的算法计算,并相互检验以保证计算结果的精准无误。
-
探测器
+关注
关注
15文章
2772浏览量
76042 -
光速
+关注
关注
0文章
10浏览量
8058 -
图像分析
+关注
关注
0文章
82浏览量
19253
发布评论请先 登录
VirtualLab:光栅的优化与分析
[VirtualLab] 倾斜光栅的参数优化及公差分析
API数据分析:淘宝流量来源分析,渠道优化!

热重分析仪在印制电路行业的应用

了解SOLIDWORKS202仿真方面的改进
PCIe协议分析仪在数据中心中有何作用?
浮思特 | SiC MOSFET 封装散热优化与开尔文源极结构
推进电机端盖结构的抗冲击分析及优化
Virtuallab Fusion应用:光栅的偏振分析
普源示波器如何连接MATLAB实现数据采集与分析
通过什么方法能获得关于Ethercat方面的设计方案和设计资料
VirtualLab:光栅的优化与分析
VirtualLab 应用:倾斜光栅的参数优化及公差分析
VA One在eVTOL噪声分析与优化中的应用



评论