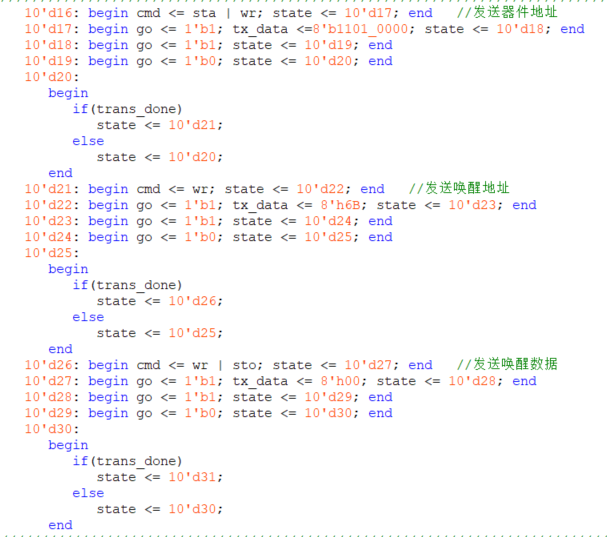
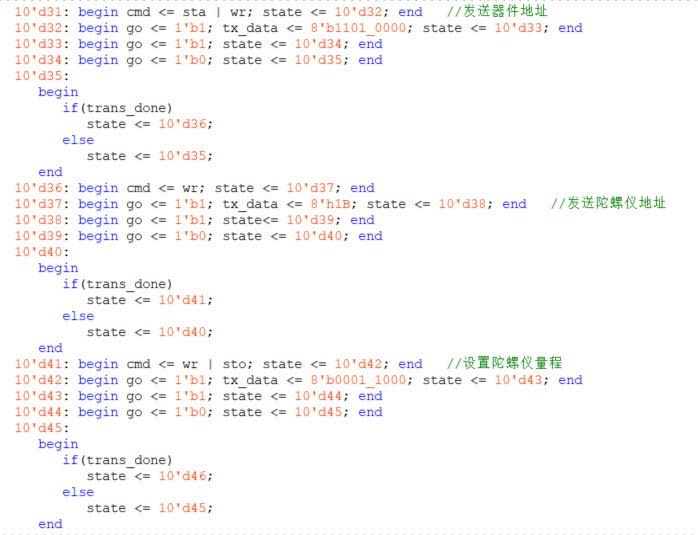
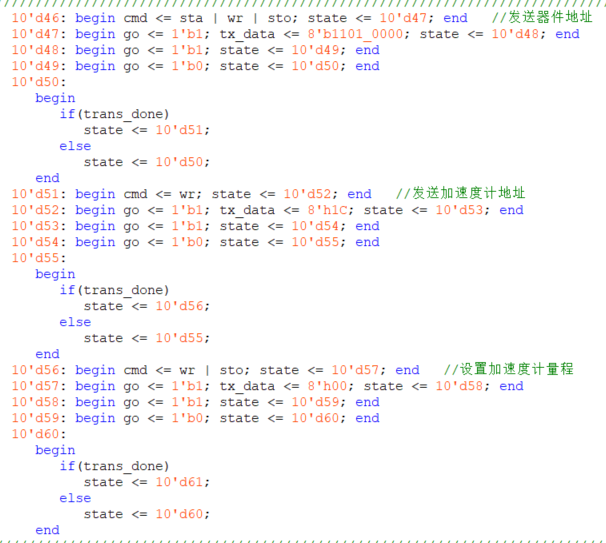
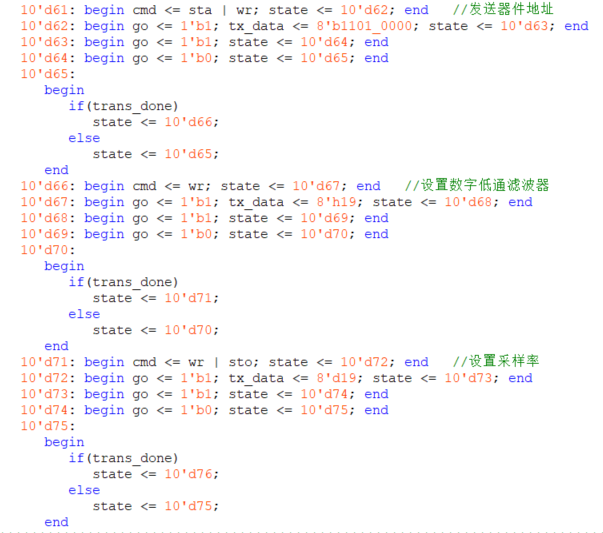
1MPU6050初始化①初始化IIC接口。②初始化MPU6050。由电源管理寄存器1(0X6B)控制。③设置角速度传感器和加速度传感器的满量程范围。由陀螺仪配置寄存器(0X1B)和加速度传感器配置
2022-02-10 06:01:30
MPU6050 DPM移植到Air724/Air800 Lua语言MPU6050MPU6050是一个三轴加速度+三轴陀螺仪的六轴传感器,自带DMP数字运动处理器,可以减少MCU复杂的融合演算数据、感
2021-08-20 07:10:36
最近刚好在学习MPU6050传感器,想从原理到应用整个过程进行总结,查阅了无数资料,也借鉴了很多博主的知识内容,我会用最通俗易懂的语句,从原理到模块初始化再到数据处理,一一进行解释,通过耐心的学习
2022-02-10 06:28:04
一.简介MPU6050 是 InvenSense 公司推出的整合性 6 轴运动处理组件,其内部整合了 3 轴陀螺仪和 3 轴加速度传感器,并且含有一个IIC 接口, 可用于连接外部磁力传感器,并利用
2022-02-10 06:59:34
一、MPU6050简介MPU6050是InvenSense公司推出的全球首款整合性6轴运动处理组件,内带3轴陀螺仪和3轴加速度传感器,并且含有一个第二IIC接口,可用于连接外部磁力传感器,利用自带
2022-02-10 06:15:57
fifo 有助于降低系统功耗7 高达400khz 的iic通信接口8 超小封装尺寸 4×4×0.9mm总结来说 就是小且功能强大主要信号脚int 输出脚cs片选脚ad0 设置地址的scl sda 主iic接口aux_cl aux_da 从iic接口mpu6050 6轴传感器初始化流程
2022-02-10 06:49:59
,总会有忘记的,所以来写这本书的随手笔记,记录重点、易忘点。该博客可以当做字典,也可以当做笔记。目前内容:MPU6050六轴传感器 一、什么是MPU6050?: MP...
2022-02-10 07:15:46
MPU6050初始化失败osDelay(1000);//上电uint8_t mpu_ok = MPU_init();uint8_t cnt = 0;while(cnt++ < 3&
2022-02-10 06:37:37
单片机问题总结:MPU6050的DMP模块初始化放在RTOS线程启动之前文章目录单片机问题总结:MPU6050的DMP模块初始化放在RTOS线程启动之前问题复现问题总结问题解决问题复现
2022-02-10 06:26:39
///////////////////////////////////////////移植原子哥的MPU6050的DMP程序到TM4C1294处理器,进行初始化时,程序在mpu_init会出
2019-06-25 04:35:55
2.4 STM32 MPU6050数据获取(IIC + DMP)本篇文章主要针对廉价的MPU6050模块。我们这里完成了MPU6050的数据获取、零偏自动设置、温漂抑制。这里提供源码工程文件,供大家
2021-08-09 07:17:09
MPU6050 加速度传感器模块
2023-03-28 13:06:19
开发个产品,初次使用MPU6050传感器,数据就是读不出来,刚开始可以读出来,不知道哪里出问题了,数据就是读不出来,初始化都完成不了。求助。
2019-05-10 04:15:44
.代码说明1.MPU6050引脚配置2.MPU6050模块写数据与命令函数3.MPU6050模块初始化函数4.MPU6050模块基础功能函数七.资料获取一.实现功能上电后OLED0.96实时显示AX,AY,AZ三轴加速度 GA,GY,GZ三轴角速度二.硬件清单OLED0.96模块
2022-02-10 06:58:54
原子哥,用你给的ALIENTEK MiniSTM32 ATK-MPU6050六轴传感器模块例程和上位机做测试,上位机有收到数据,但是数据很乱,我使劲晃动MPU6050传感器,波形,姿态都没有任何反应,还有这协议怎么用呀?
2019-09-22 21:42:31
现在我MPU6050自检的做法是,保存处于绝对水平面上的AD值,这样以后自检的时候不用处于水平面也是得到相对准确的数据。但是我发现MPU6050在上电初始化的时候,如果处于垂直就初始化失败,是什么原因导致的呢?或者如何解决。谢谢!
2019-04-09 06:36:19
。MPU6050 内部整合了 3 轴陀螺仪和 3 轴加速度传感器,并且含有一个第二 IIC 接口,可用于连接外部磁力传感器,并利用自带的数字运动处理器(DMP: Digital Motion Process...
2022-02-10 08:01:29
mpu6050是一个六轴传感器包括三轴陀螺仪和三轴加速度,分别可以测得三轴的角速度、加速度。但是一般传感器的原始数据都不能直接直接拿来用,都需要滤波和姿态融合解算。对于初学者来说卡尔曼滤波和姿态融合
2022-02-10 06:25:15
写在最前面,这篇博客写到的姿态解算是由DMP硬件完成的,介绍了底层驱动,重点例举了MPU6050的初始化函数,加速度计,陀螺仪原始数据的读取函数,设置传感器的量程范围,采样频率函数。下一篇博客,我会
2022-02-10 07:46:19
文章目录前言一、MPU6050是什么?二、使用步骤1.引入库2.读入数据总结前言一、MPU6050是什么?MPU6050是一款性价比很高的陀螺仪,可以读取X Y Z 三轴角度,X Y Z 三轴加速度
2022-02-10 07:22:09
1.请问下MPU6050的温度传感器的温度是怎样计算的?2.Temperature = 36.53 + regval/340regval-------读出来的值(int型)和 T= (寄存器读出来
2018-05-23 13:38:22
MPU6050简介什么是MPU6050MPU6050的特点MPU6050框图MPU6050初始化MPU6050—DMP使用介绍MPU6050—DMP使用DMP驱动库驱动代码硬件连接
2022-02-10 07:02:46
最近学习接触了MPU6050,它是全球首例整合性6轴运动处理组件,集合了三轴陀螺仪和三轴加速度计的器件,它不仅能够用于测试角度,它还集合了许多模块,列如DMP,可以用来充当自平衡小车及四轴飞行器
2015-07-19 17:15:40
1.简介MPU6050是InvenSense 公司的 一款高性能三轴加速度+三轴陀螺仪的六轴传感器芯片, 该芯片内部整合了 3 轴陀螺仪和 3 轴加速度传感器,并可利用自带的数字运动处理器(DMP
2021-08-04 07:27:16
一、MPU6050简介1.什么是MPU6050?MPU6050是InvenSense公司推出的全球首款整合性6轴运动处理组件,内带3轴陀螺仪和3轴加速度传感器,并且含有一个第二IIC接口,可用
2021-08-09 07:25:57
时,MPU-60X0提供完整的9轴运动融合输出到其主I2C或SPI端口(SPI仅在MPU-6000上可用)。MPU6050, 该芯片内部集成一个三轴加速度传感器和一个三轴陀螺仪,并且自带 DMP(Digital M...
2022-02-11 07:46:16
}/**********************************************************///函数名称:void MPU6050Init//入口参数:无//出口参数:无//函数功能:MPU6050初始化
2018-06-26 06:30:10
:(11条消息) STM32—驱动六轴MPU6050输出欧拉角_肥宅快乐博客-CSDN博客_mpu6050欧拉角)1,bsp_mpuiic(用来与陀螺仪进行IIC通信,IIC的底层驱动:之后的MPU操作都是通过此driver)(1)IO方向设置(用来管理SDA为输入还是输出)在IIC中用得
2022-02-10 07:14:08
文章目录引言简述一下mpu6050和stm32的一些坑吧MPU6050 I2C读写MPU6050 初始化读取内部温度传感器读取陀螺仪DMP的移植读取三轴角度引言最近玩了IMU模块,看了很多的博客
2022-02-10 07:35:27
mpu6050向arduino传输数据,matlab通过串口再读取传感器数据。由于每次启动传感器会重新校准,导致每次传感器测得同一姿态、同一位置x y两个方向角的初始值都不一样,这就造成很大的麻烦
2021-08-05 11:00:28
过程 -------------------------------------------------------------可能有些说明不对的地方,请大家一定要提出来提出来,共同学习 .共同进步.–>>>本文章HAL库编写MPU6050输出六轴原始数据,移植DMP输出自身姿态角程序链接程序链接程序链接目录一、mpu6050的通信方式二、CubeMX
2022-02-10 07:01:20
MPU6050六轴传感器,可以同时检测三轴加速度、三轴陀螺仪(三轴角速度)及温度,可以用到平衡车、四轴飞行器、手机、运动手环等等设备之中,其中的三维坐标方向为三轴加速度方向,在三维坐标的各个方向形成
2022-02-10 07:50:58
mpu6050
2016-05-26 12:21:09
ATK-MPU6050六轴传感器模块程序源码
2016-05-26 12:22:37
if(mpu_init()==0)//初始化MPU6050{ res=mpu_set_sensors(INV_XYZ_GYRO|INV_XYZ_ACCEL);//设置所需要的传感器 if(res)return 1;res=mpu_configure_fifo(INV_XYZ_G
2022-02-10 06:47:29
起因最近在学习stm32开发板,最近学习到了需要IIC通信的MPU6050六轴传感器,看了正点原子的例程,发现其中有很多位操作不是很理解。经过补习了一番C语言,总结了一些位操作的知识。接下来直接贴
2022-02-10 06:06:28
MPU6050各个方面的介绍,这篇博文[MPU6050开发 – 基本概念简介](https://blog.csdn.net/qq_29350001/article/details/78603714)GY-521MPU6050 是三维角度传感器,为全球首例集成六轴传感器的运动处理组件。这里的六轴,代表的是它
2022-02-10 07:45:15
前言MPU6050 是一个很好玩传感器,在四轴、体感、计步等应用领域都能看到这小芯片的影子,其内部的结构、功能十分丰富,可玩度非常高。同时,对传感器采集到的数据进行分析还能得到许多信息,但此时的一些
2018-05-05 18:02:51
STM32 控制MPU6050之使用说明 mpu6050是陀螺仪、加速计和一个可扩展的传根器RM-MPU-3000A.pdf ATK-MPU6050六轴传感器模块使用说明(Mini V3)_AN1507.pdf
2018-07-06 02:25:47
STM32 控制MPU6050之使用说明 mpu6050是陀螺仪、加速计和一个可扩展的传根器RM-MPU-3000A.pdf ATK-MPU6050六轴传感器模块使用说明(Mini V3)_AN1507.pdf
2018-07-02 08:05:23
STM32野火平衡小车之如何搭建之PID与MPU6050初始化
2021-10-13 06:04:02
MPU6050六轴传感器测量物体姿态角一、姿态角(欧拉角)基本概念二、代码实现功能描述三、接线图五、完整代码六、代码运行结果七、需要注意的地方一、姿态角(欧拉角)基本概念物体在空间中的姿态可以用
2022-02-10 07:42:40
一、问题stm32c8t6移植MPU6050总是初始化失败,在自检测试通不过,返回8,网上的解决方法是将MPU6050放置水平,或者握紧杜邦线,但是怎么都不好使。二、解决方法查找到一篇文章说是晶振
2022-02-10 07:43:52
PLL作为时钟源,以获得更高精度的时钟。同时,使能角速度传感器和加速度传感器,这两个操作通过电源管理寄存器 2(0X6C)来设置,设置对应位为 0 即可开启。至此,MPU6050 的初始化就完成
2020-06-12 15:16:29
今天测试一下6轴加速度传感器MPU6050,主要验证库文件能否兼容我的模块。首先打开在线编程公有库找到MPU6050并复制到自己的私有库里。然后新建一个工程:打开工程后在工程中添加已经保存的库
2017-06-12 23:19:24
的振荡器。此次使用MPU6050传感器模块,模块尺寸也很小巧,只有13mmx20mm大小,模块上已经焊接好MPU6050芯片以及必要的外围电路。图1MPU6050六轴陀螺仪传感器二、硬件连接设计COF
2022-04-11 01:08:47
一、MPU6050介绍 首先我们了解下MPU6050模块 MPU6050 为全球首例集成六轴传感器的运动处理组件,内置了运动融合引擎,用于手持和桌面的应用程序、游戏控制器、体感遥控以及
2023-03-28 14:46:13
我们使用DMP库对MPU6050初始化并且通过DMP中的库函数读取加速度值和陀螺仪值显示在LCD上2、实验前准备使用DMP库需要在MPU官方下载固件并将下面六个导入工程并且在固件库中需要进行一定的设定。在inv_mpu.c文件中预留有调用文件的接口,需要我们提前设定一下首先#define MPU
2021-08-16 06:28:06
中直观地看到 6 轴传感器的位置变化。该代码中使用的 6 轴传感器是 InvenSense MIPU 6050, 与 I2C 协议通信。 初始化和控制界面功能功能功能可以在 MPU 6050.c 功能
2023-08-30 07:51:52
中直观地看到 6 轴传感器的位置变化。该代码中使用的 6 轴传感器是 InvenSense MIPU 6050, 与 I2C 协议通信。 初始化和控制界面功能功能功能可以在 MPU 6050.c 功能
2023-08-23 06:03:18
最近做东西用到了MPU6050这个3轴重力加速度+3轴角速度传感器,虽然使用库函数正确的读取到并算出了要用的值,但在加速度传感器和角速度传感器的功能上与伙伴产生了分歧。关于重力加速度和角速度传感器
2015-08-20 08:54:02
最近在实验mpu6050,遇到2个问题。1、在初始化之后,读取mpu6050的地址时,会出现地址为0的情况;2、第一次读取地址为0x68时,读取数据全为0,然后Reset后会出现一组数据。每隔1s
2016-08-09 09:32:59
摘要:使用小熊派开发板,通过硬件IIC与MPU6050六轴传感器模块通信,完成相应寄存器配置,成功获取陀螺仪、加速度计数据。本问主要讲述使用小熊派开发板+MPU6050六轴传感器,获取加速度计以及
2022-02-10 07:00:37
一下,如果要移植Mpu6050的DMP,从底层到应用层大概分为这几个步骤:1. 底层IIC驱动编写。2. Mpu6050初始化及配置函数层。 3. 硬件驱动程序通过I2C与传感器通信。4. Dmp应用层。首先要熟悉在标准库下的移植,那么下面的问题只是一些避免入坑的注意事项。二、面临的问题及解决方法HA
2022-02-10 06:08:06
之前介绍过,项目的第一项操作是要采集帕金森病人的震颤数据,整体架构图如下:这里采用的是一款基于MPU6050的JY61型号传感器,好处在于内置卡尔曼滤波,直接可以通过串口输出六轴数据,大大方便了编程
2021-12-17 07:00:42
基于战舰V3的MPU6050六轴陀螺仪实验陀螺仪的分类3轴传感器指的是3轴的加速度,根据这个加速度我们解算出XY两轴的角度。6轴传感器指的是3轴的加速度和3轴角速度,根据这两个数据我们解算出XYZ三
2022-02-10 06:53:43
如何使用DMP库对MPU6050进行初始化呢?怎样通过DMP中的库函数读取加速度值和陀螺仪值并显示在LCD上呢?
2021-11-17 08:06:38
如何对基于stm32的mpu6050传感器进行测试呢?有哪些测试步骤呢?
2021-11-18 06:59:29
mpuiic.c文件,修改IIC初始化函数 void MPU_IIC_Init(void),将要初始化的IO口改为自己的4、进入mpuiic.h文件,修改下面几个宏定义5、修改MPU6050的IIC地址一般经过上面几个步骤就已经移植成功了,不够有时候会出现MPU6050的DMP模式初始化失败的情况
2022-02-10 07:55:52
在做飞行器的时候是怎么解决mpu6050自检不准确的,如果mpu6050倾斜这放着自检,初始化完成后计算出的几个姿态也会不准确,网上找了一些资料说是要加磁阻才行……但是我看好多市面上卖的四轴都是用
2019-06-14 04:35:59
如题,最近在使用MPU6050请教一下用过的老司机是怎么消除传感器各轴之间的耦合误差的,也就是消除只有一个轴旋转时对其他轴的影响。
2019-05-16 03:18:17
mpu6050详细源码,配有电路图以及初始化C语言程序。详细的mpu6050中文资料!
2016-02-18 11:53:20 98
98 MPU6050的使用介绍。。。ATK-MPU6050六轴传感器模块使用说明(Mini V3)_AN1507。
2016-03-21 10:09:3767 已经实现两路,逻辑分析仪测试时间为3-4ms,只需调用初始化和读取数据就可以提取MPU6050多路数据
2017-01-19 21:49:1827 MPU6050(硬件IIC)MPU6050(硬件IIC)
2017-04-02 16:29:3071 为避免纠缠于电路细节,我们直接使用集成的MPU6050模块。MPU6050的数据接口用的是I2C总线协议,因此我们需要Wire程序库的帮助来实现Arduino与MPU6050之间的通信。请先确认你的Arduino编程环境中已安装Wire库。
2017-11-07 14:25:06 6954
6954 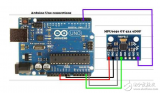
MPU6050是运动处理传感器,它集成了3轴陀螺仪,3轴加速度计以及DMP,其中的DMP是一个可通过IIC接口扩展的数字运动处理器。
2017-11-07 14:50:1312890 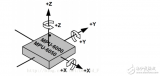
本文为大家分享了mpu6050六轴传感器模块驱动程序源代码,STM32F1读取MPU6050的加速度和角度传感器数据的初始化步骤,以及MPU6050DMP初始化函数、DMP姿态解算后的俯仰角、横滚角和航向角。
2017-12-11 14:26:5235036 
本文介绍了mpu6050和mpu3050有什么不同和相同。分别介绍了mpu6050和mpu3050基础以及特点,mpu3050是三轴陀螺传感器,MPU6050内部整合了3轴陀螺仪和3轴加速度传感器。
2017-12-11 15:41:5534849 mpu6050常用作提供飞控运行时的姿态测量和计算。本文首先介绍了MPU6050姿态解算的原理,其次详细的介绍了mpu6050姿态解算程序。
2018-03-09 09:15:2441958 最近,被安排调试MPU6050 模块,之前从没接触过相关MEMS 传感器, 所以感觉一头雾水。幸好还有网络, 还有强大的兄弟团的支持。不过, 很可惜,网上大部分资料只是简单教你如何配置MPU6050
2019-07-24 16:27:0732 本文档的主要内容详细介绍的是MPU6050陀螺仪的详细C语言程序合集免费下载包括了:陀螺仪MPU6050 IIC 测试程序和时钟初始化,端口初始化,串口1 初始化,中断初始化,看门狗初始化,延时函数,长延时函数,窗口提前唤醒中断,主函数等
2019-07-30 17:22:4866 最近接触MPU6050 ,下面对6050 初始化配置做一点总结,如有错误还望不吝赐教在初始化MPU6050 前,先确定单片机与MPU6050 通信是否正常, 根据手册MPU6050 采用的是400kbit/s 的IIC。
2019-08-01 16:55:3588 本文档的主要内容详细介绍的是MPU6050传感器的电路原理图免费下载。
2019-08-29 08:00:00106 本文档的主要内容详细介绍的是MPU6050传感器的四元数欧拉角程序免费下载。
2019-08-30 17:29:5323 本文档的主要内容详细介绍的是MPU6050传感器的源代码合集免费下载。
2020-01-03 16:22:2945 本文档的主要内容详细介绍的是MPU6050传感器的电路原理图免费下载。
2020-05-29 08:00:0037 MPU6050专用稳压模块的原理图设计
2021-11-07 19:21:0037 MPU6050简介什么是MPU6050MPU6050的特点MPU6050框图MPU6050初始化MPU6050—DMP使用介绍MPU6050—DMP使用DMP驱动库驱动代码硬件连接
2021-12-06 11:51:1167 mpuiic.c文件,修改IIC初始化函数 void MPU_IIC_Init(void),将要初始化的IO口改为自己的4、进入mpuiic.h文件,修改下面几个宏定义5、修改MPU6050的IIC地址一般经过上面几个步骤就已经移植成功了,不够有时候会出现MPU6050的DMP模式初始化失败的情况
2021-12-06 11:51:1115 移植正点原子mpu6050代码,总是MPU6050初始化失败解决首先观察正点原子MPU6050代码,发现它在读取MPU6050数据的同时,还将数据通过串口发送给上位机进行调试,而我们移植
2021-12-06 11:51:1238 1 MPU6050初始化①初始化IIC接口。②初始化MPU6050。由电源管理寄存器1(0X6B)控制。③设置角速度传感器和加速度传感器的满量程范围。由陀螺仪配置寄存器(0X1B)和加速度传感器
2021-12-06 12:06:0728 MPU6050初始化失败osDelay(1000); //上电uint8_t mpu_ok = MPU_init();uint8_t cnt = 0;while
2021-12-06 12:36:0613 一、问题stm32c8t6移植MPU6050总是初始化失败,在自检测试通不过,返回8,网上的解决方法是将MPU6050放置水平,或者握紧杜邦线,但是怎么都不好使。二、解决方法查找到一篇文章说是
2021-12-06 12:36:0618 文章目录引言简述一下mpu6050和stm32的一些坑吧MPU6050 I2C读写MPU6050 初始化读取内部温度传感器读取陀螺仪DMP的移植读取三轴角度引言最近玩了IMU模块,看了很多的博客
2021-12-06 12:36:0714 MPU6050六轴传感器,可以同时检测三轴加速度、三轴陀螺仪(三轴角速度)及温度,可以用到平衡车、四轴飞行器、手机、运动手环等等设备之中,其中的三维坐标方向为三轴加速度方向,在三维坐标的各个方向形成
2021-12-06 13:21:1011 if(mpu_init()==0) //初始化MPU6050 { res=mpu_set_sensors(INV_XYZ_GYRO|INV_XYZ_ACCEL);//设置所需要的传感器 if(res)return 1; res=mpu_configure_fifo(INV_XYZ_G
2021-12-06 13:21:119 @[TOC]STM32初始化MPU6050低功耗 中断唤醒STM32初始化MPU6050低功耗 中断唤醒代码如下: 已亲自测试(2021.2.4) (以下代码 采样率是20Hz)低功耗中断唤醒 记得
2021-12-06 13:36:1320 fifo 有助于降低系统功耗7 高达400khz 的iic通信接口8 超小封装尺寸 4×4×0.9mm总结来说 就是小且功能强大主要信号脚int 输出脚cs 片选脚ad0 设置地址的scl sda 主iic接口aux_cl aux_da 从iic接口mpu6050 6轴传感器初始化流程
2021-12-06 13:51:1218 单片机问题总结:MPU6050的DMP模块初始化放在RTOS线程启动之前文章目录单片机问题总结:MPU6050的DMP模块初始化放在RTOS线程启动之前问题复现问题总结问题解决问题复现
2021-12-06 14:06:0810 关于调试 MPU6050 DMP初始化过不去 总是显示mpu_set_sensor complete 的解决办法
2021-12-06 14:36:1316 图五. 接线六.代码说明1. MPU6050引脚配置2. MPU6050模块写数据与命令函数3. MPU6050模块初始化函数4. MPU6050模块基础功能函数七.资料获取一. 实现功能上电后OLED0.96实时显示AX,AY,AZ三轴加速度 GA,GY,GZ三轴角速度二. 硬件清单OLED0.96模块
2021-12-06 16:06:0929 一下,如果要移植Mpu6050的DMP,从底层到应用层大概分为这几个步骤:1. 底层IIC驱动编写。2. Mpu6050初始化及配置函数层。 3. 硬件驱动程序通过I2C与传感器通信。4. Dmp应用层。首先要熟悉在标准库下的移植,那么下面的问题只是一些避免入坑的注意事项。二、面临的问题及解决方法HA
2021-12-06 16:06:1023
 电子发烧友App
电子发烧友App









 工商网监
工商网监
评论