 智新向格力采购10台CNC和10台608机器人
智新向格力采购10台CNC和10台608机器人

近日,格力智能装备技术研究院与珠海智新科技有限公司(以下简称智新)的项目合作签约仪式顺利举行。此次合作得到政府的大力支持,项目所购置的设备将得到专项资金的补贴。
智新总经理范秀广表示,智新因插件机和SCARA机器人量产需求,向格力采购10台CNC和10台608机器人,格力则基于为打造智能装备增添新‘引擎’的需要,向智新采购50台机器人异形插件机。
智新成立于2013年,公司在2016年成功研发了“SmartAI SR系列机器人异形插件平台”和“全球首台图形化编程SCARA机器人”,9月份投放市场即受到好评,订单从30台猛增至300台。
SmartAI SR机器人异形插件平台运用了机器视觉技术、多轴机器人运动控制技术、高灵敏度压力检测技术以及控制方面的工控技术、可视化VB编程技术、工业以太网技术、接口技术、传感技术、伺服步进等技术,实现自动上料,自动视觉检测,自动插件整个过程的全线自动化作业。
声明:本文内容及配图由入驻作者撰写或者入驻合作网站授权转载。文章观点仅代表作者本人,不代表电子发烧友网立场。文章及其配图仅供工程师学习之用,如有内容侵权或者其他违规问题,请联系本站处理。
举报投诉
-
机器人
+关注
关注
213文章
30637浏览量
219806 -
格力
+关注
关注
5文章
560浏览量
37781
原文标题:格力与智新达成项目合作
文章出处:【微信号:robotmagazine,微信公众号:机器人技术与应用】欢迎添加关注!文章转载请注明出处。
发布评论请先 登录
相关推荐
热点推荐
多家果链巨头强势入局具身智能机器人
11月4日,越疆机器人与蓝思科技宣布强强联手,双方在具身智能机器人、协作机器人、四足机器人等领域签订采购协议,其中,越疆
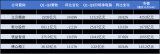
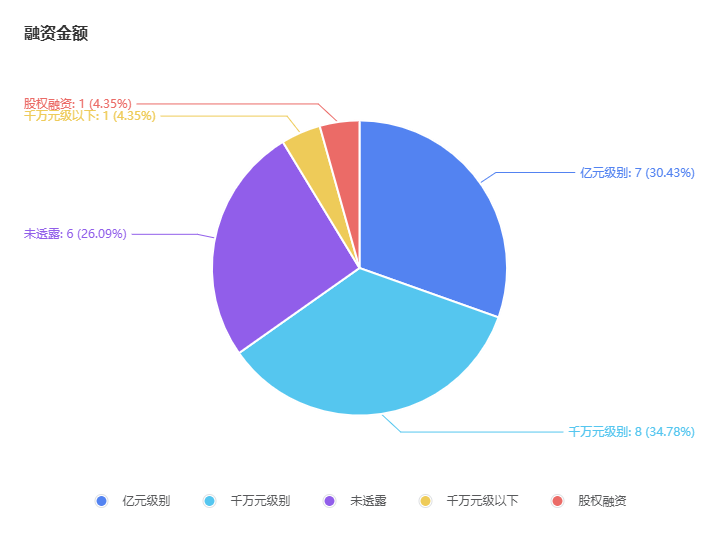
2025年10月机器人产业链融资事件盘点
据高工机器人不完全统计,今年10月,国内机器人产业链有超20起融资事件披露,融资企业类型覆盖了工业机器人、核心零部件、机器视觉、传感器、灵巧
越疆第10万台机器人成功下线 越疆机器人成为首家出货量突破10万台的企业
据悉,越疆协作机器人生产基地第10万台机器人已经正式下线。这意味着越疆机器人成为首家出货量突破10万台
CNC行业|复合机器人CNC上下料及自动换刀解决方案
经世智能CNC上下料复合机器人,复合机器人集成AGV+机械臂+视觉系统,提供CNC多工序柔性上下料、CNC全自动刀具更换自动化解决方案,打通

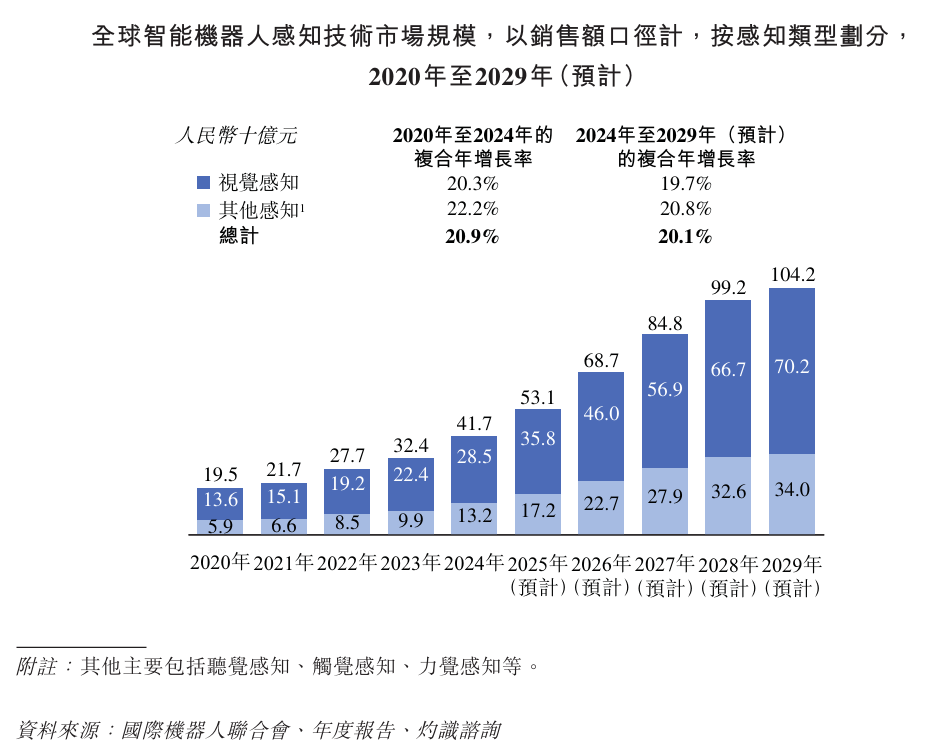
有一家机器人企业IPO!年销695万台传感器,海外割草机器人撬动新增长
(电子发烧友网综合报道)今年,资本市场再度升温,掀起新一轮上市热潮。多家机器人企业纷纷寻求IPO上市,其中港股市场已成为众多企业的首选。据香港联交所数据,已有超过10家机器人及相关产业链企业披露
江智机器人产品评价体系
我们江智机器人公司自2016年开始进入机器人产业已近10年,始终是坚持实际市场导向,订单生产的方式。已开发生产了不少于10款以上机器人产品系

第10万台机器人下线,普渡机器人领航全球服务机器人规模化量产
6月10日,在位于江苏盐城建湖的普渡超级工厂,深圳市普渡科技有限公司(简称“普渡机器人”)迎来了第10万台机器人的下线,标志着产品累计出货量达到10

盘点#机器人开发平台
地瓜机器人RDK X5开发套件地瓜机器人RDK X5开发套件产品介绍 旭日5芯片10TOPs算力-电子发烧友网机器人开发套件 Kria KR260机
发表于 05-13 15:02
10大机器人项目落地苏州
近日,苏州市具身智能机器人产业生态大会召开,据了解,本次大会共征集了84个具身智能机器人产业项目,总投资超160亿元,其中钧舵机器人、法奥机器人、汇川技术、艾利特
人形机器人全景产业链大梳理!
特斯拉人形机器人进入量产前夕,有望给全球机器人市场带来“鲶鱼效应”。近期,特斯拉CEO马斯克公布了最新的人形机器人Optimus的产量规划。根据规划,特斯拉将在2026年将人形机器人的

TE Connectivity如何为工业机器人发展技术赋能
制造业迈向智能化的一个重要标志,就是机器人的应用。根据国际机器人联合会(IFR)发布的《2024年世界机器人报告》,全球工厂中运行的工业机器人数量已经超过428万
10余家企业亮相2024高工机器人年会
日前,以“万物向新 蓄力笃行”为主题的2024(第十一届)高工机器人年会在深圳机场凯悦酒店隆重举办,本次大会由高工机器人、高工机器人产业研究所(GGII)联合举办。
《具身智能机器人系统》第10-13章阅读心得之具身智能机器人计算挑战
阅读《具身智能机器人系统》第10-13章,我对具身智能机器人的工程实践有了全新认识。第10章从实时性角度剖析了机器人计算加速问题。
发表于 01-04 01:15
禾赛科技成为全球首个单月交付10 万台的激光雷达企业
禾赛科技 12 月激光雷达交付量突破 100,000 台,成为全球首个达成单月交付量超过 10 万台的激光雷达企业。值得一提的是,禾赛面向机器人市场单月交付激光雷达超过 20,000

禾赛科技12月激光雷达交付量突破10万台
禾赛科技 12 月激光雷达交付量突破 100,000 台,成为全球首个达成单月交付量超过 10 万台的激光雷达企业。值得一提的是,禾赛面向机器人市场单月交付激光雷达超过 20,000





 工商网监
工商网监
评论